
无人驾驶智能小车及控制方法.pdf

斌斌****公主

1/7

2/7
3/7

4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
无人驾驶智能小车及控制方法.pdf
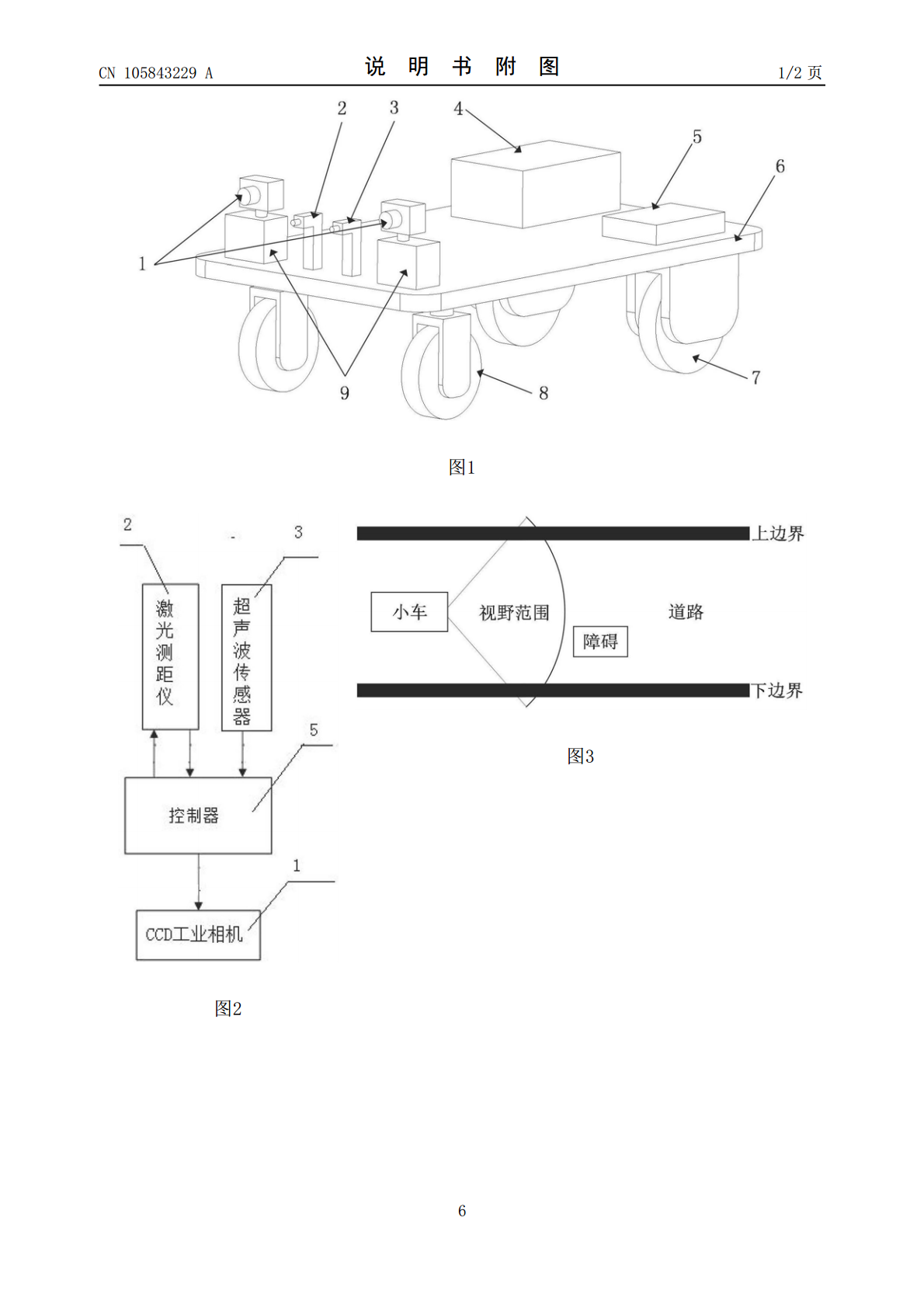
本发明公开了一种无人驾驶智能小车,包括电源模块、控制器、车身、驱动轮,导向轮,舵机、导航定位装置、避障装置,所述车身底部安装四个车轮,两个驱动轮安装于后部,用于驱动小车行驶,两个导向轮安装于前部,用于转向;所述电源模块为蓄电池,用于提供电能;所述导航定位装置包括2个CCD工业相机和2个舵机,所述舵机布置于车身前部,所述CCD工业相机置于舵机上,舵机带动CCD工业相机旋转;所述避障装置包括激光测距仪、超声波传感器,所述激光测距仪、超声波传感器、CCD工业相机将采集的信号输送至控制器,所述控制器对舵机进行控制

无人驾驶小车的路径跟踪控制装置及方法、无人驾驶小车.pdf
本发明公开无人驾驶小车的路径跟踪控制方法,首先,根据无人驾驶小车的左右轮驱动电压与无人驾驶小车的转向角的状态方程(1)得到左右轮驱动电压;之后,利用左右轮驱动电压与控制电压模拟量的线性关系得到控制电压模拟量并输入到电机控制器;最后,由电机控制器根据所述控制电压模拟量控制所述左右轮驱动电压,实现路径的跟踪控制。根据该路径跟踪控制方法,能够对行驶过程中存在的较大偏差进行快速平滑纠正、实现精准的路径跟踪控制。
智能循迹小车的控制方法.pdf
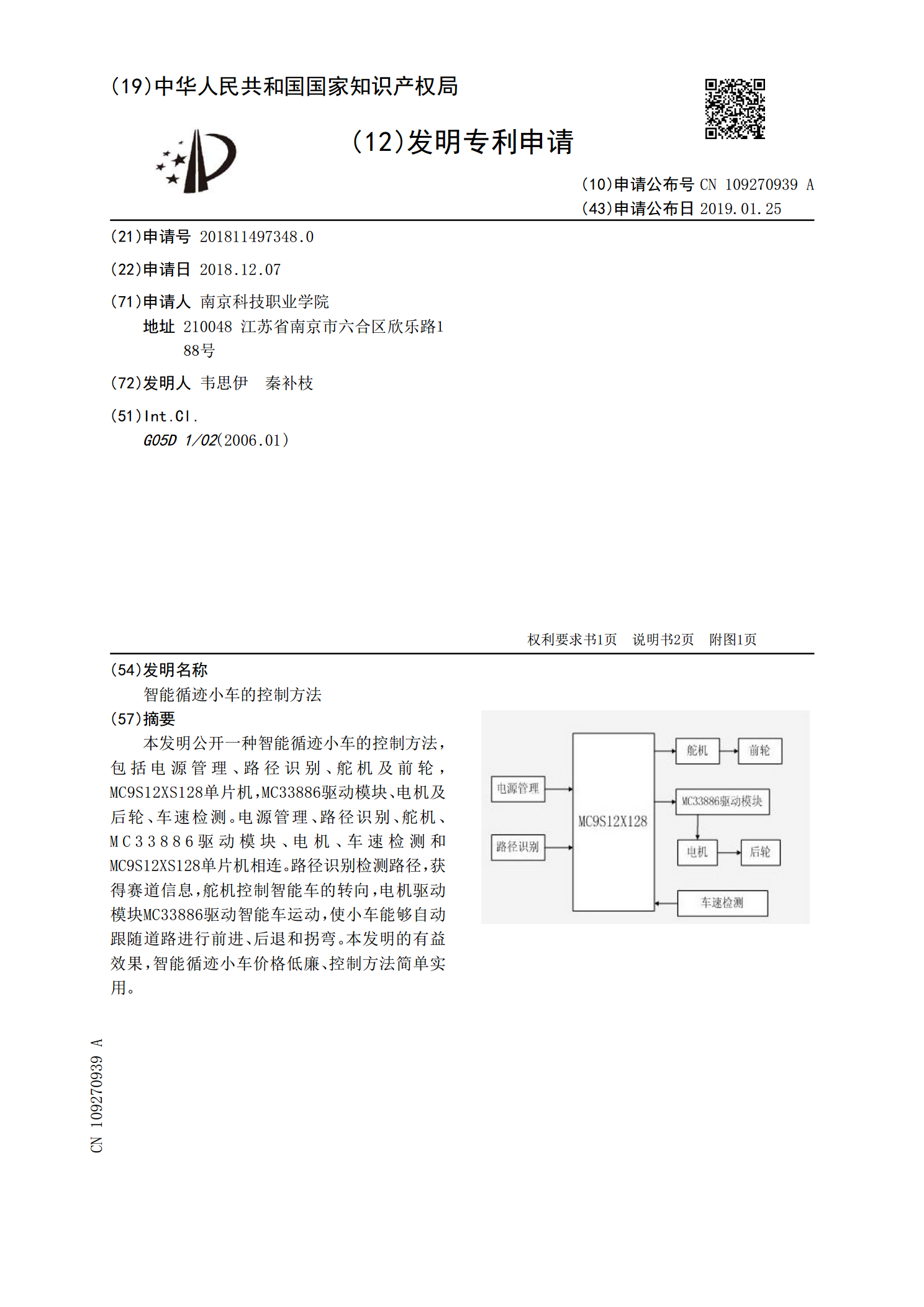
本发明公开一种智能循迹小车的控制方法,包括电源管理、路径识别、舵机及前轮,MC9S12XS128单片机,MC33886驱动模块、电机及后轮、车速检测。电源管理、路径识别、舵机、MC33886驱动模块、电机、车速检测和MC9S12XS128单片机相连。路径识别检测路径,获得赛道信息,舵机控制智能车的转向,电机驱动模块MC33886驱动智能车运动,使小车能够自动跟随道路进行前进、后退和拐弯。本发明的有益效果,智能循迹小车价格低廉、控制方法简单实用。

智能无人装车系统的智能小车及其位移控制方法.pdf
本发明涉及智能无人装车系统的智能小车及其位移控制方法,应用于垛装产品智能无人装车系统,所述智能小车底部设置有舵轮、辅助万向轮、第一从动轮组和第二从动轮组,所述智能小车底部左右两端分别设置有第三测距传感器和第四测距传感器,所述舵轮驱动模块可以将舵轮的中心转轴在水平面内进行旋转从而改变舵轮的前进方向,通过行进过程中监测第三测距传感器和第四测距传感器的测距值差异,判断是否发生倾斜,避免发生倾翻。

无人驾驶的小车.docx
无人驾驶的小车内容分析无人驾驶汽车是一种智能汽车,实质上就是轮式机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶。无人驾驶给每个人来说是非常神秘的,但通过本节的学习,让学生人人能设计出具有无人驾驶的智能小车,虽然这种智能小车程序设计完成后就能实现机器人运动过程中不碰撞任何障碍物,但是这与现实中的无人驾驶差别还是很大的,在现实生活中的无人驾驶还需要用更多的传感器和引入卫星导航数据。课堂实例中的红外测障传感器就实现了实验室的无人驾驶,培养了学生的学习兴趣,同时也消除了学生的神秘感。教学目标掌握