
无人驾驶小车的路径跟踪控制装置及方法、无人驾驶小车.pdf

建英****66

1/8

2/8

3/8

4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人驾驶小车的路径跟踪控制装置及方法、无人驾驶小车.pdf
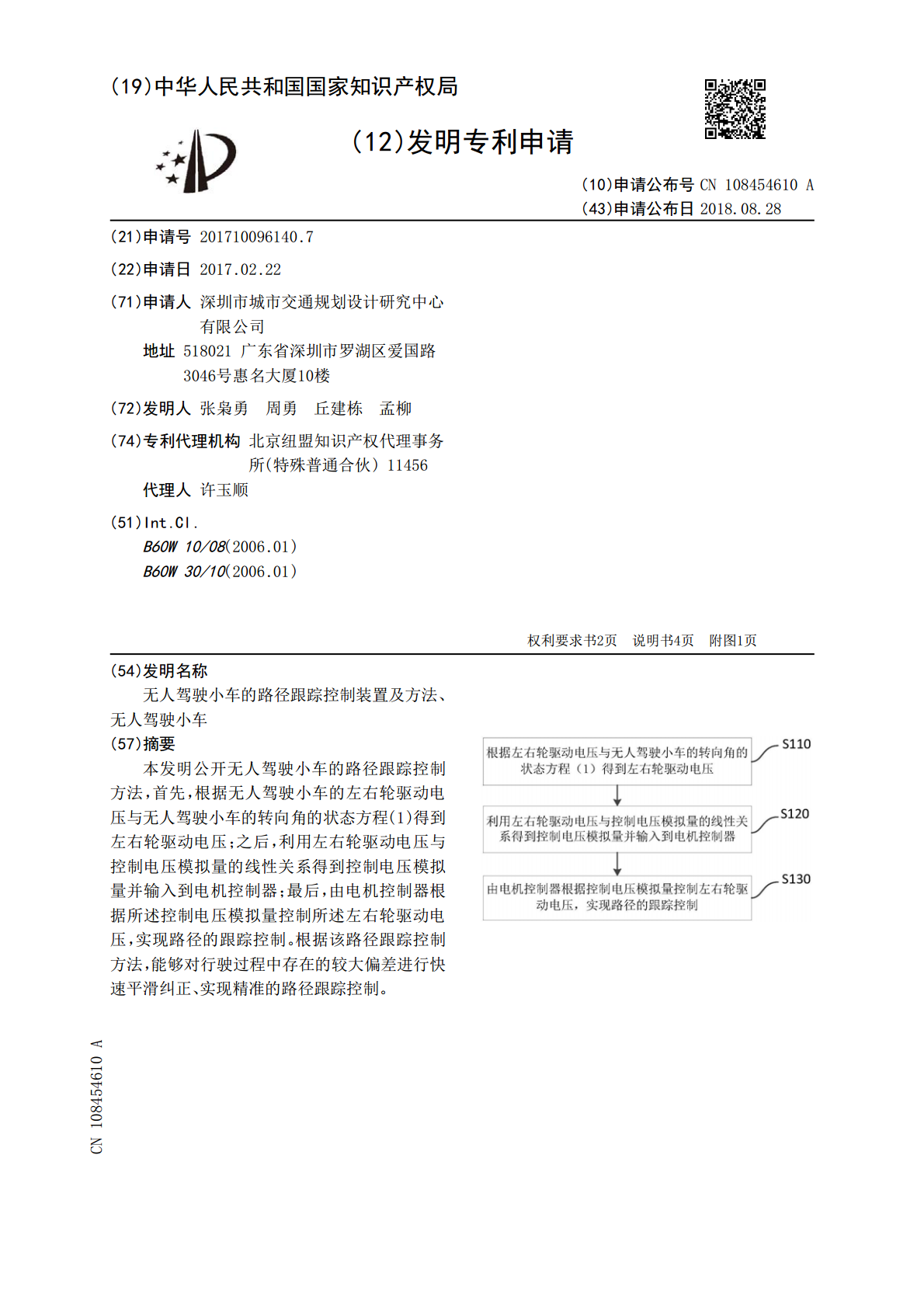
本发明公开无人驾驶小车的路径跟踪控制方法,首先,根据无人驾驶小车的左右轮驱动电压与无人驾驶小车的转向角的状态方程(1)得到左右轮驱动电压;之后,利用左右轮驱动电压与控制电压模拟量的线性关系得到控制电压模拟量并输入到电机控制器;最后,由电机控制器根据所述控制电压模拟量控制所述左右轮驱动电压,实现路径的跟踪控制。根据该路径跟踪控制方法,能够对行驶过程中存在的较大偏差进行快速平滑纠正、实现精准的路径跟踪控制。
无人驾驶智能小车及控制方法.pdf
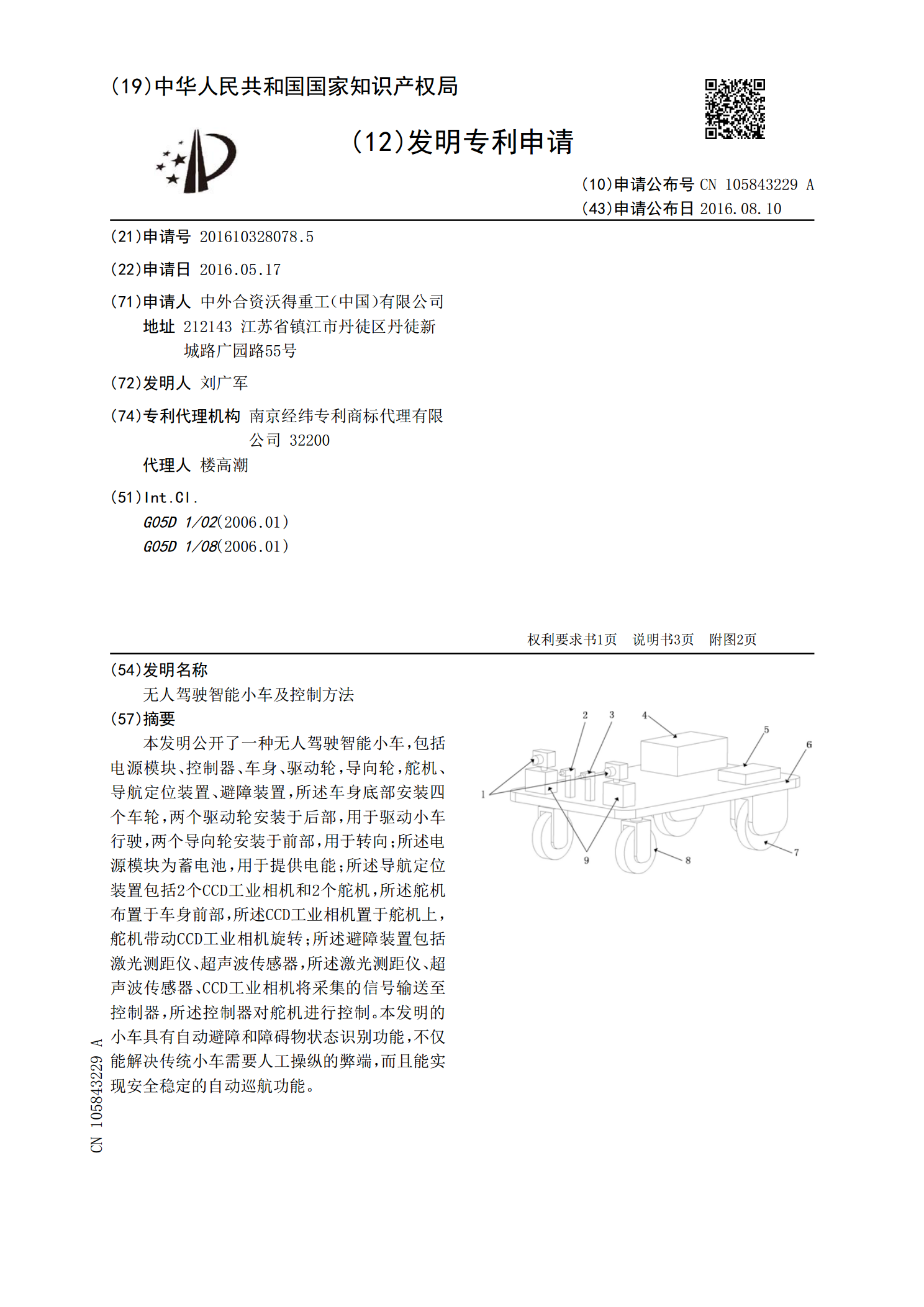
本发明公开了一种无人驾驶智能小车,包括电源模块、控制器、车身、驱动轮,导向轮,舵机、导航定位装置、避障装置,所述车身底部安装四个车轮,两个驱动轮安装于后部,用于驱动小车行驶,两个导向轮安装于前部,用于转向;所述电源模块为蓄电池,用于提供电能;所述导航定位装置包括2个CCD工业相机和2个舵机,所述舵机布置于车身前部,所述CCD工业相机置于舵机上,舵机带动CCD工业相机旋转;所述避障装置包括激光测距仪、超声波传感器,所述激光测距仪、超声波传感器、CCD工业相机将采集的信号输送至控制器,所述控制器对舵机进行控制

无人驾驶的小车.docx
无人驾驶的小车内容分析无人驾驶汽车是一种智能汽车,实质上就是轮式机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶。无人驾驶给每个人来说是非常神秘的,但通过本节的学习,让学生人人能设计出具有无人驾驶的智能小车,虽然这种智能小车程序设计完成后就能实现机器人运动过程中不碰撞任何障碍物,但是这与现实中的无人驾驶差别还是很大的,在现实生活中的无人驾驶还需要用更多的传感器和引入卫星导航数据。课堂实例中的红外测障传感器就实现了实验室的无人驾驶,培养了学生的学习兴趣,同时也消除了学生的神秘感。教学目标掌握

一种无人驾驶车辆的路径跟踪控制方法及装置.pdf
本发明提供一种无人驾驶车辆的路径跟踪控制方法及装置,在获取到车辆的目标路径后,能够基于目标路径的路径信息、车辆的姿态信息、以及目标路径的预测信息分别计算不同维度下的方向盘转角,并基于此控制车辆的方向盘转角,完成对车辆的横向控制。基于本发明,能够应对无人驾驶任务的全工况、多场景,在无人驾驶车辆行车过程中提高路径跟踪的稳定性和精准性,从而保证无人驾驶车辆的安全性能。

无人驾驶汽车路径跟踪控制研究.pptx
添加副标题目录PART01PART02无人驾驶汽车的定义与分类路径跟踪控制系统的组成与功能路径跟踪控制技术的研究意义PART03基于模型预测控制的路径跟踪算法基于滑模控制的路径跟踪算法基于智能控制的路径跟踪算法算法比较与优化PART04实验平台搭建与测试环境实验数据采集与分析实验结果与性能评估实验结论与改进方向PART05面临的挑战与问题技术发展趋势与展望未来研究方向与重点对产业发展的影响与推动作用PART06研究成果总结对无人驾驶汽车产业的贡献对未来研究的建议与展望感谢您的观看