
无人驾驶车辆的转向控制方法和装置.pdf

戊午****jj

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人驾驶车辆的转向控制方法和装置.pdf
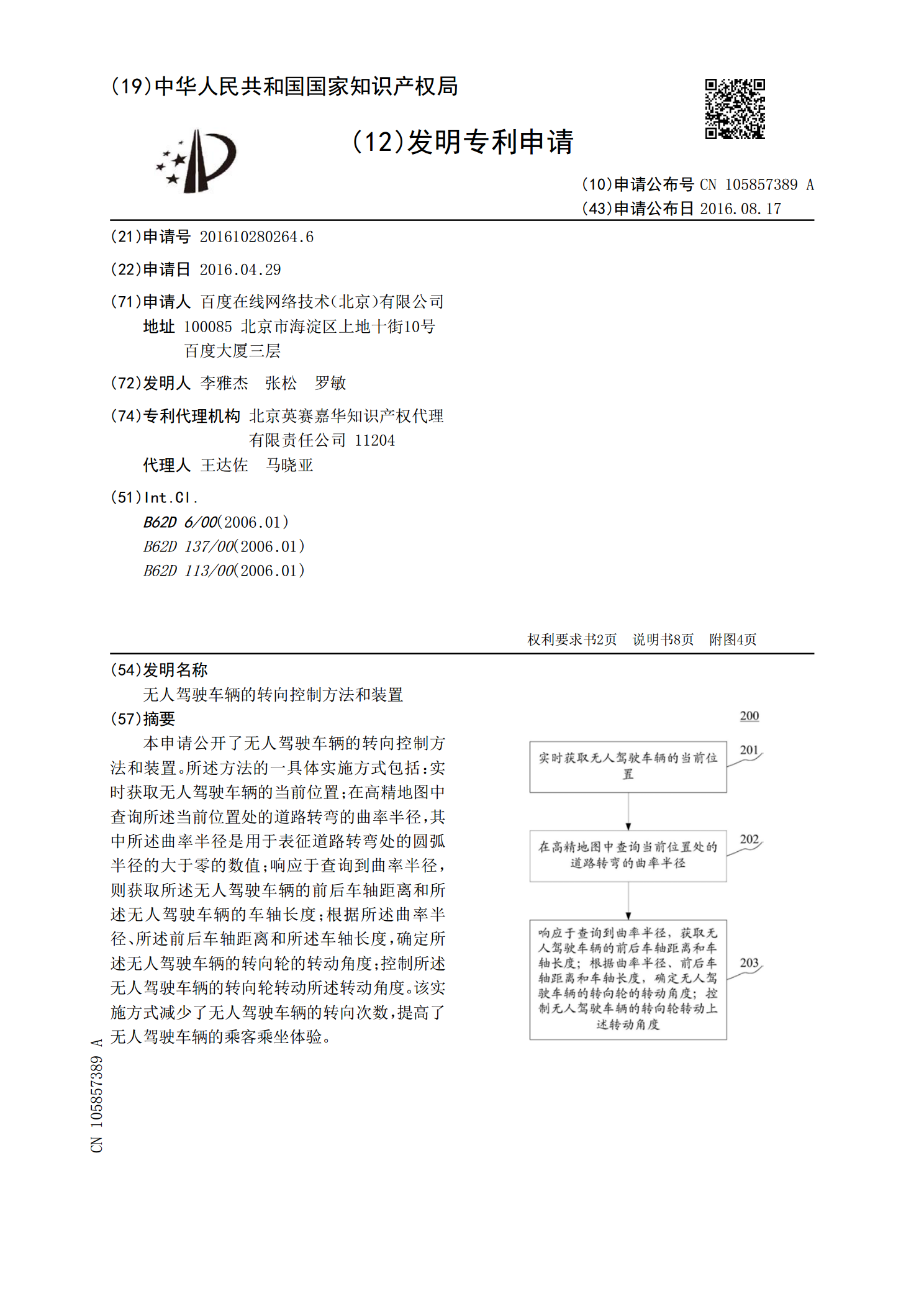
本申请公开了无人驾驶车辆的转向控制方法和装置。所述方法的一具体实施方式包括:实时获取无人驾驶车辆的当前位置;在高精地图中查询所述当前位置处的道路转弯的曲率半径,其中所述曲率半径是用于表征道路转弯处的圆弧半径的大于零的数值;响应于查询到曲率半径,则获取所述无人驾驶车辆的前后车轴距离和所述无人驾驶车辆的车轴长度;根据所述曲率半径、所述前后车轴距离和所述车轴长度,确定所述无人驾驶车辆的转向轮的转动角度;控制所述无人驾驶车辆的转向轮转动所述转动角度。该实施方式减少了无人驾驶车辆的转向次数,提高了无人驾驶车辆的乘客
一种无人驾驶车辆自动转向装置的转向控制方法.pdf
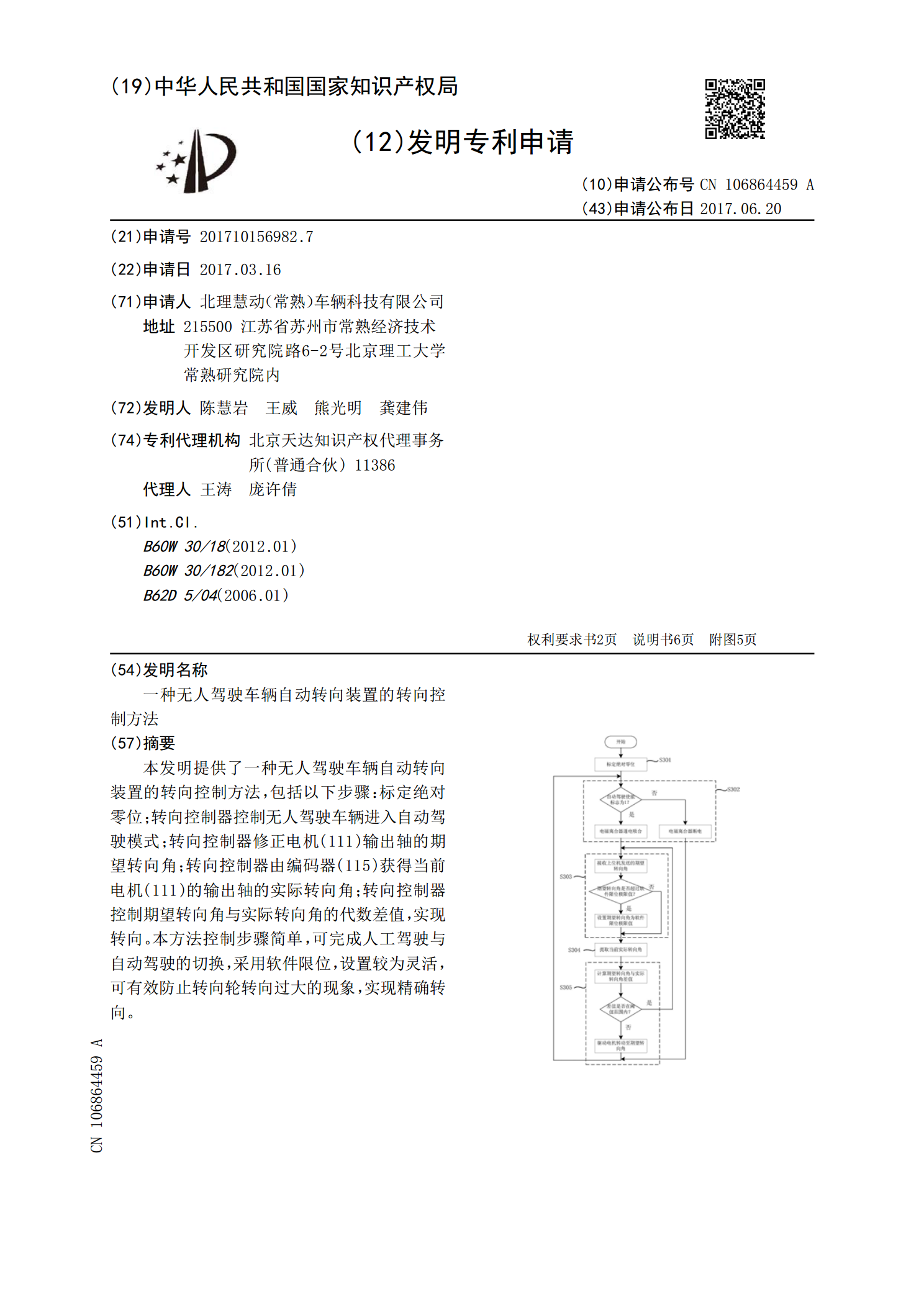
本发明提供了一种无人驾驶车辆自动转向装置的转向控制方法,包括以下步骤:标定绝对零位;转向控制器控制无人驾驶车辆进入自动驾驶模式;转向控制器修正电机(111)输出轴的期望转向角;转向控制器由编码器(115)获得当前电机(111)的输出轴的实际转向角;转向控制器控制期望转向角与实际转向角的代数差值,实现转向。本方法控制步骤简单,可完成人工驾驶与自动驾驶的切换,采用软件限位,设置较为灵活,可有效防止转向轮转向过大的现象,实现精确转向。

车辆的转向控制装置和转向控制方法.pdf
本发明提供一种能够抑制在驱动源启动时转向操作器的转向操作状态违背驾驶员的意图的车辆的转向控制装置和转向控制方法。使能够切换将扭矩传递路径机械分离的分离状态和将扭矩传递路径机械连结的接合状态的备用离合器在发动机启动时为接合状态,当在发动机启动后检测出的转向扭矩为离合器分离开始扭矩Ts1以下时,将接合状态的备用离合器切换为分离状态,当使备用离合器的状态为接合状态时,通过由使转向轮转向的转轮马达输出与转向操作器的操作相应地辅助转向轮转向的转轮辅助扭矩,当将接合状态的备用离合器切换为分离状态时,通过转轮马达输出与

车辆的转向控制装置和转向控制方法.pdf
本发明具备:转向马达(2),其输出用于使转向轮转动的转向扭矩;转向马达角度传感器(16),其检测转向马达(2)的旋转角度;转向马达驱动电流供给部,其向转向马达(2)供给用于使转向轮的转向角成为与方向盘的操作相应的角度的转向马达驱动电流;设定旋转角存储部,其预先存储与设定转向角对应的、作为转向马达(2)的旋转角度的设定旋转角度,该设定转向角设定为比转向轮能够转动的极限的转向角小的角度;以及电流供给量限制部,其对转向马达驱动电流的供给量进行限制以避免转向马达角度传感器(16)所检测出的旋转角度超过预先存储在设
车辆的转向控制方法、装置和车辆.pdf
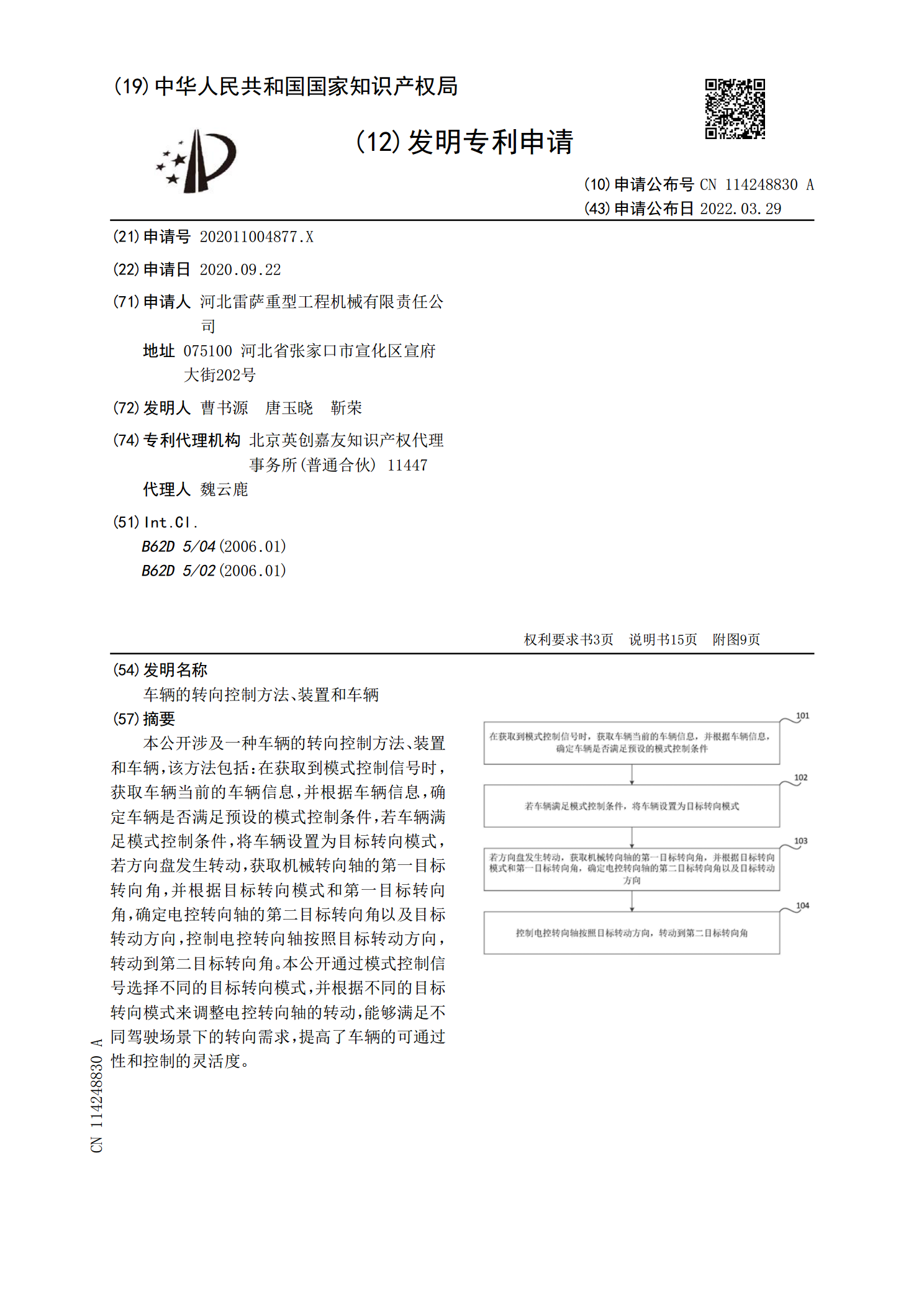
本公开涉及一种车辆的转向控制方法、装置和车辆,该方法包括:在获取到模式控制信号时,获取车辆当前的车辆信息,并根据车辆信息,确定车辆是否满足预设的模式控制条件,若车辆满足模式控制条件,将车辆设置为目标转向模式,若方向盘发生转动,获取机械转向轴的第一目标转向角,并根据目标转向模式和第一目标转向角,确定电控转向轴的第二目标转向角以及目标转动方向,控制电控转向轴按照目标转动方向,转动到第二目标转向角。本公开通过模式控制信号选择不同的目标转向模式,并根据不同的目标转向模式来调整电控转向轴的转动,能够满足不同驾驶场景