
一种基于行星传动的履带车辆及其传动系统.pdf

森林****io


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于行星传动的履带车辆及其传动系统.pdf
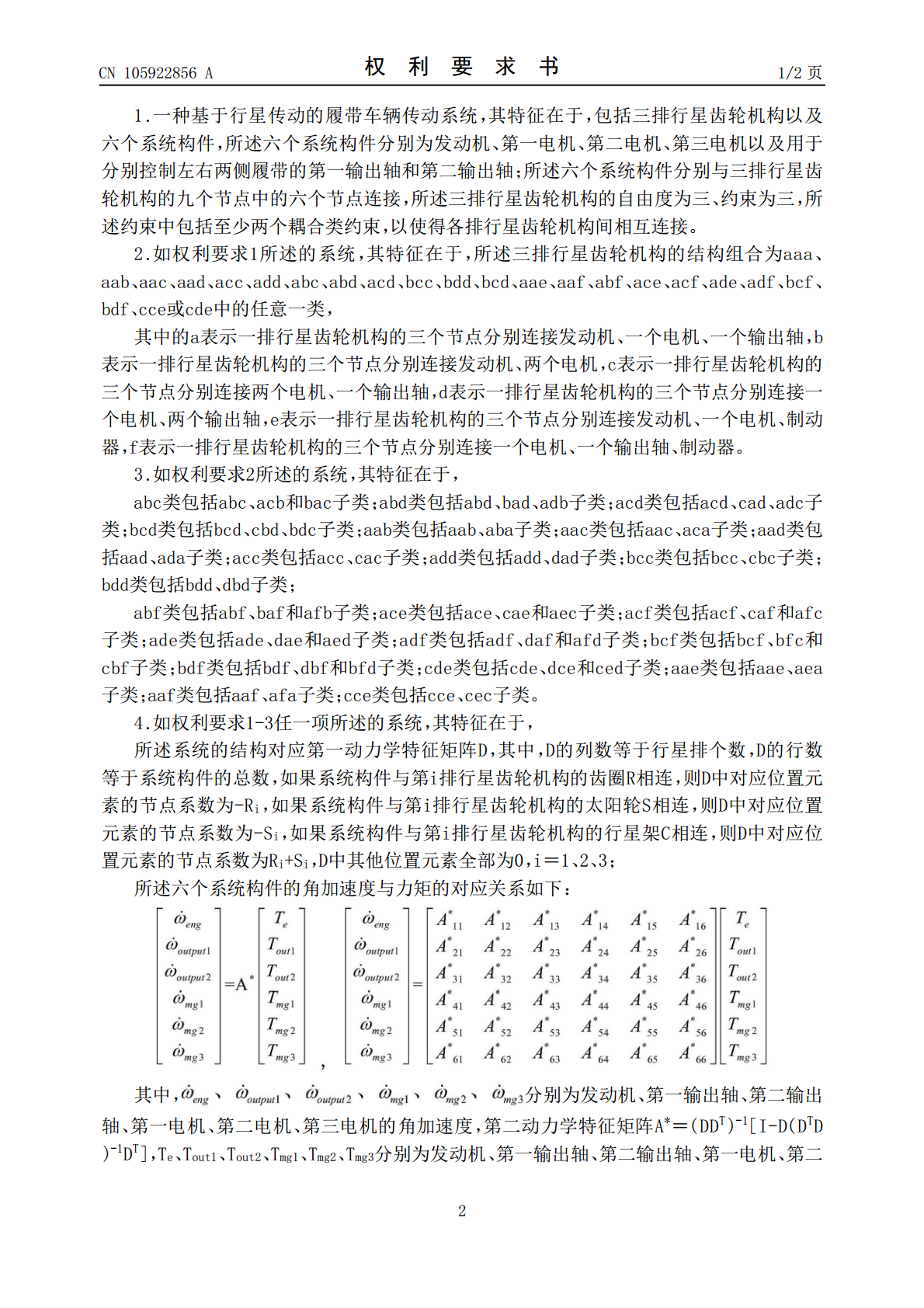
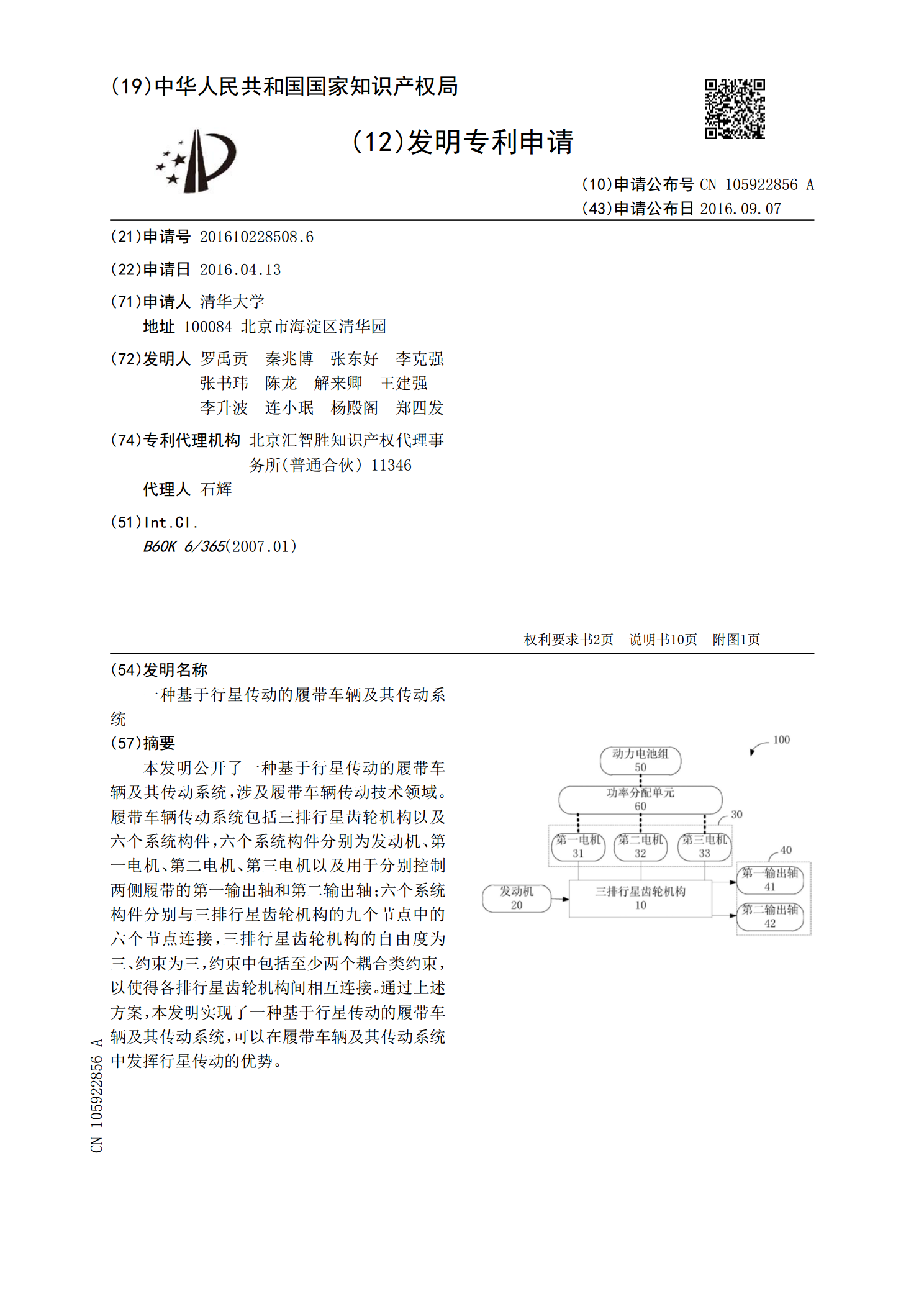
本发明公开了一种基于行星传动的履带车辆及其传动系统,涉及履带车辆传动技术领域。履带车辆传动系统包括三排行星齿轮机构以及六个系统构件,六个系统构件分别为发动机、第一电机、第二电机、第三电机以及用于分别控制两侧履带的第一输出轴和第二输出轴;六个系统构件分别与三排行星齿轮机构的九个节点中的六个节点连接,三排行星齿轮机构的自由度为三、约束为三,约束中包括至少两个耦合类约束,以使得各排行星齿轮机构间相互连接。通过上述方案,本发明实现了一种基于行星传动的履带车辆及其传动系统,可以在履带车辆及其传动系统中发挥行星传动的
一种履带车辆传动系统.pdf
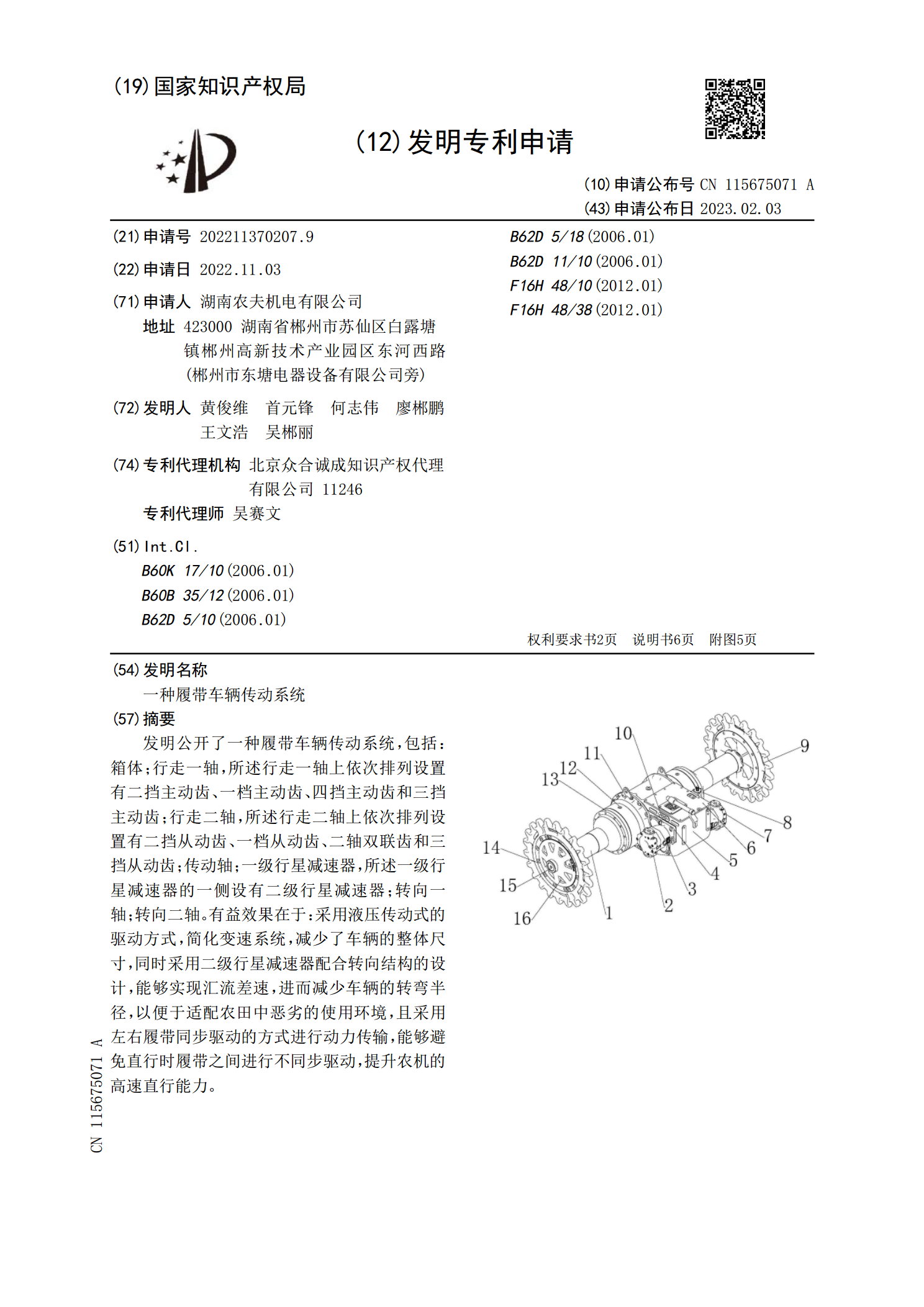
发明公开了一种履带车辆传动系统,包括:箱体;行走一轴,所述行走一轴上依次排列设置有二挡主动齿、一档主动齿、四挡主动齿和三挡主动齿;行走二轴,所述行走二轴上依次排列设置有二挡从动齿、一档从动齿、二轴双联齿和三挡从动齿;传动轴;一级行星减速器,所述一级行星减速器的一侧设有二级行星减速器;转向一轴;转向二轴。有益效果在于:采用液压传动式的驱动方式,简化变速系统,减少了车辆的整体尺寸,同时采用二级行星减速器配合转向结构的设计,能够实现汇流差速,进而减少车辆的转弯半径,以便于适配农田中恶劣的使用环境,且采用左右履带
一种基于行星传动的液压式混合动力车辆传动系统.pdf
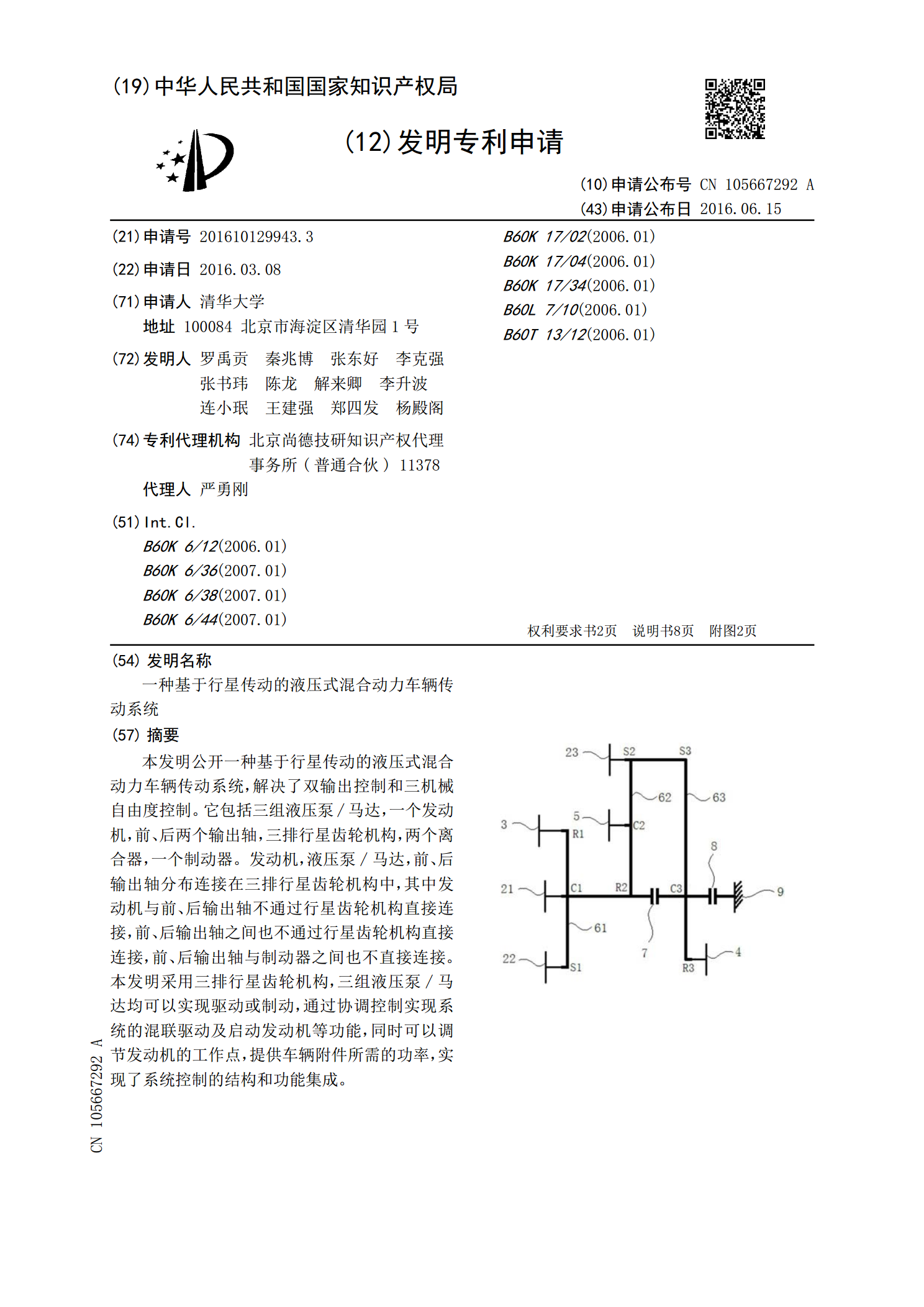
本发明公开一种基于行星传动的液压式混合动力车辆传动系统,解决了双输出控制和三机械自由度控制。它包括三组液压泵/马达,一个发动机,前、后两个输出轴,三排行星齿轮机构,两个离合器,一个制动器。发动机,液压泵/马达,前、后输出轴分布连接在三排行星齿轮机构中,其中发动机与前、后输出轴不通过行星齿轮机构直接连接,前、后输出轴之间也不通过行星齿轮机构直接连接,前、后输出轴与制动器之间也不直接连接。本发明采用三排行星齿轮机构,三组液压泵/马达均可以实现驱动或制动,通过协调控制实现系统的混联驱动及启动发动机等功能,同时可
一种履带车辆单功率流无级转向传动系统.pdf
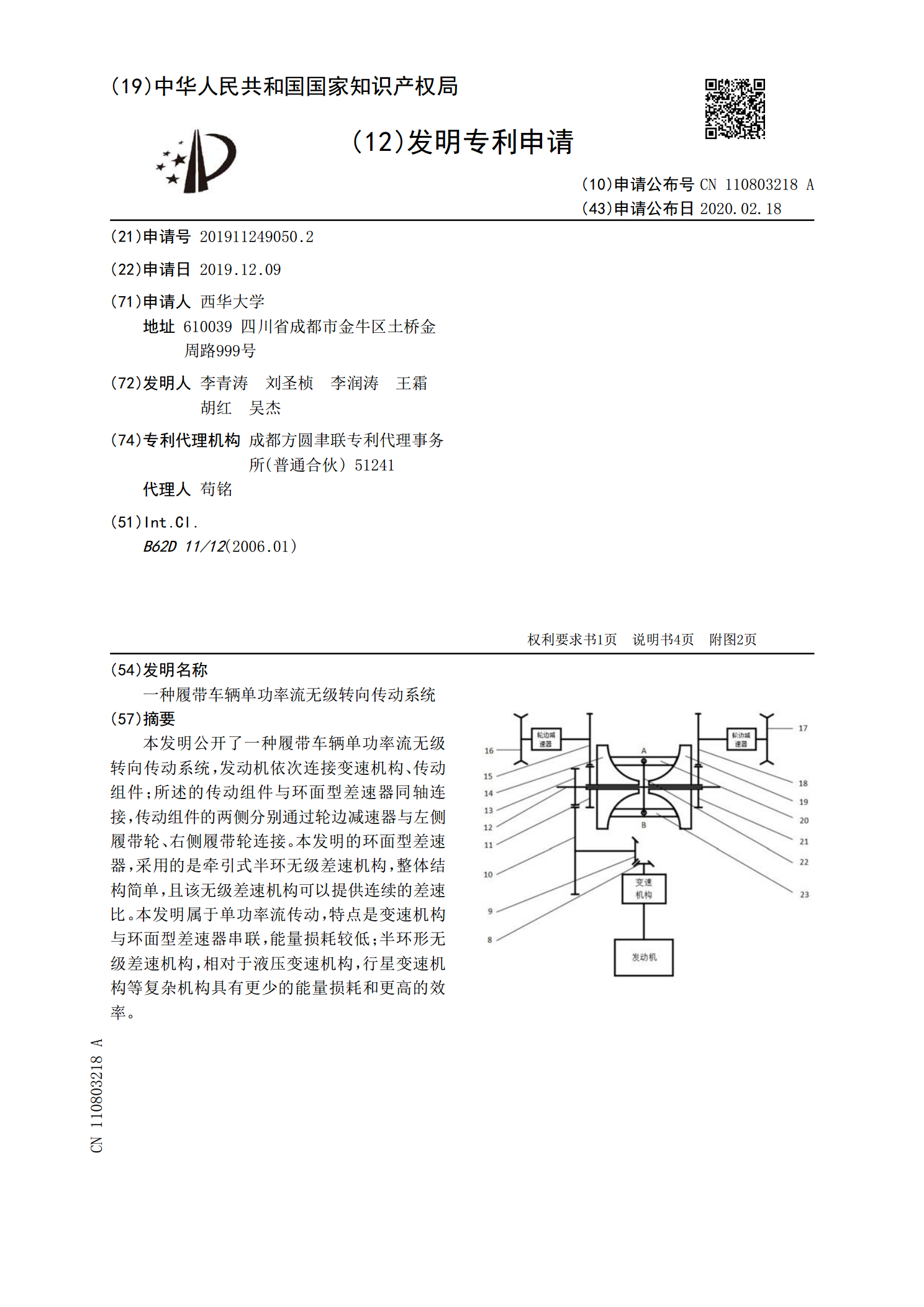
本发明公开了一种履带车辆单功率流无级转向传动系统,发动机依次连接变速机构、传动组件;所述的传动组件与环面型差速器同轴连接,传动组件的两侧分别通过轮边减速器与左侧履带轮、右侧履带轮连接。本发明的环面型差速器,采用的是牵引式半环无级差速机构,整体结构简单,且该无级差速机构可以提供连续的差速比。本发明属于单功率流传动,特点是变速机构与环面型差速器串联,能量损耗较低;半环形无级差速机构,相对于液压变速机构,行星变速机构等复杂机构具有更少的能量损耗和更高的效率。
一种履带车辆综合传动系统动、定轮铸造方法.pdf
本发明涉及一种履带车辆综合传动系统动、定轮铸造方法,步骤依次为:制作模具及芯盒‑造型‑制芯‑合箱‑浇注‑打箱‑抛丸‑次清理‑探伤‑时效处理‑转出。本发明采用砂型铸造覆膜砂组芯工艺,可以获得形状完整、表面光洁的铸件,从而保证铸件的表面质量和尺寸精度。设置冒口,在覆膜砂型芯中放置外冷铁对中间圆柱部位进行激冷,使铸件实现顺序凝固,保证冒口能够充分补缩热节处,有效地提高冒口的补缩效率,以获得健全的内部质量。在横浇道两处放置陶瓷过滤网,提高铁水的纯净度,浇注时充型平稳,防止产生卷气、夹砂、夹渣等铸造缺陷,同时改善铸