
一种曲面自适应吸附式全方位移动平台.pdf

英哲****公主


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种曲面自适应吸附式全方位移动平台.pdf
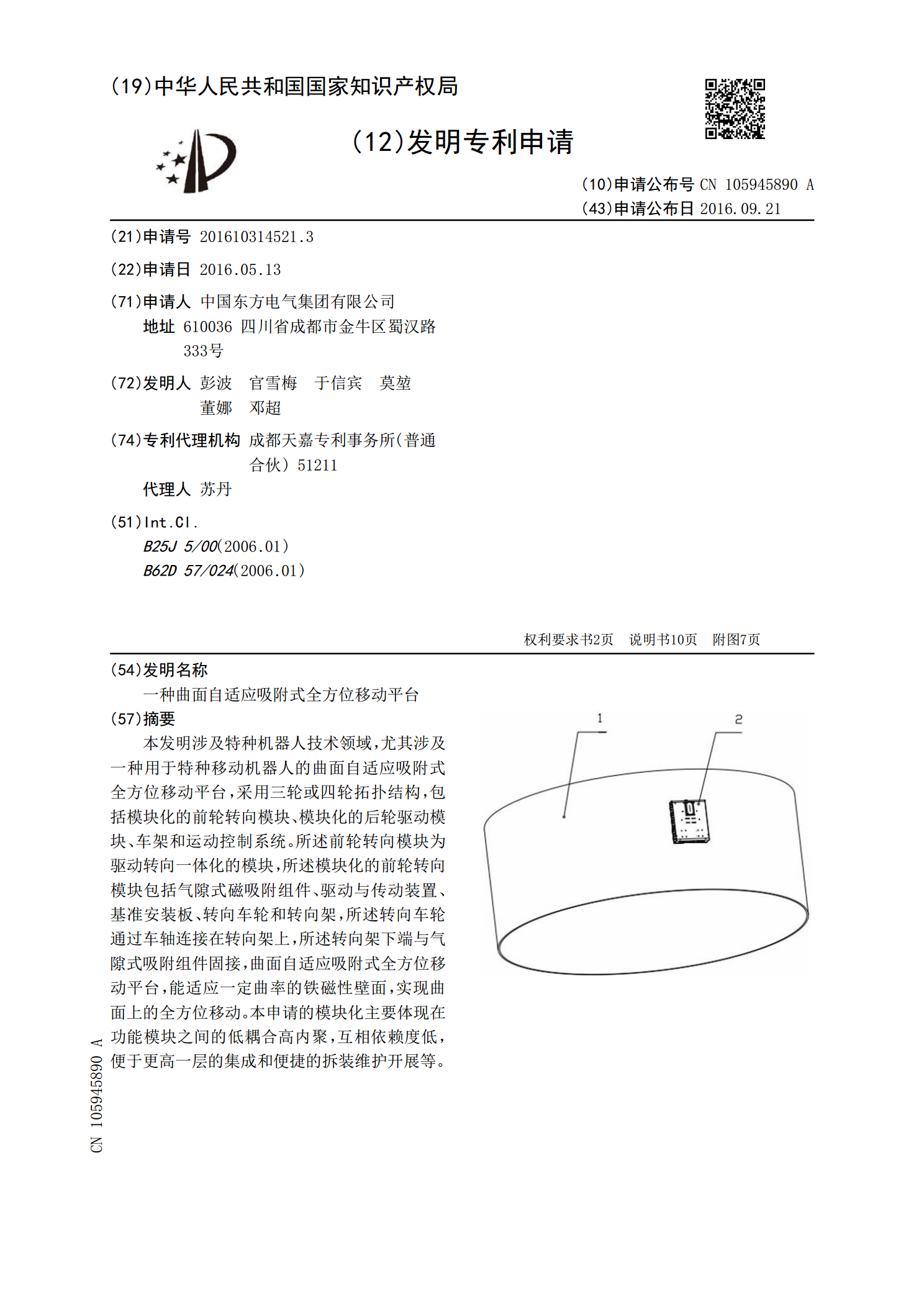
本发明涉及特种机器人技术领域,尤其涉及一种用于特种移动机器人的曲面自适应吸附式全方位移动平台,采用三轮或四轮拓扑结构,包括模块化的前轮转向模块、模块化的后轮驱动模块、车架和运动控制系统。所述前轮转向模块为驱动转向一体化的模块,所述模块化的前轮转向模块包括气隙式磁吸附组件、驱动与传动装置、基准安装板、转向车轮和转向架,所述转向车轮通过车轴连接在转向架上,所述转向架下端与气隙式吸附组件固接,曲面自适应吸附式全方位移动平台,能适应一定曲率的铁磁性壁面,实现曲面上的全方位移动。本申请的模块化主要体现在功能模块之间
一种全模块化的吸附式全方位移动平台.pdf
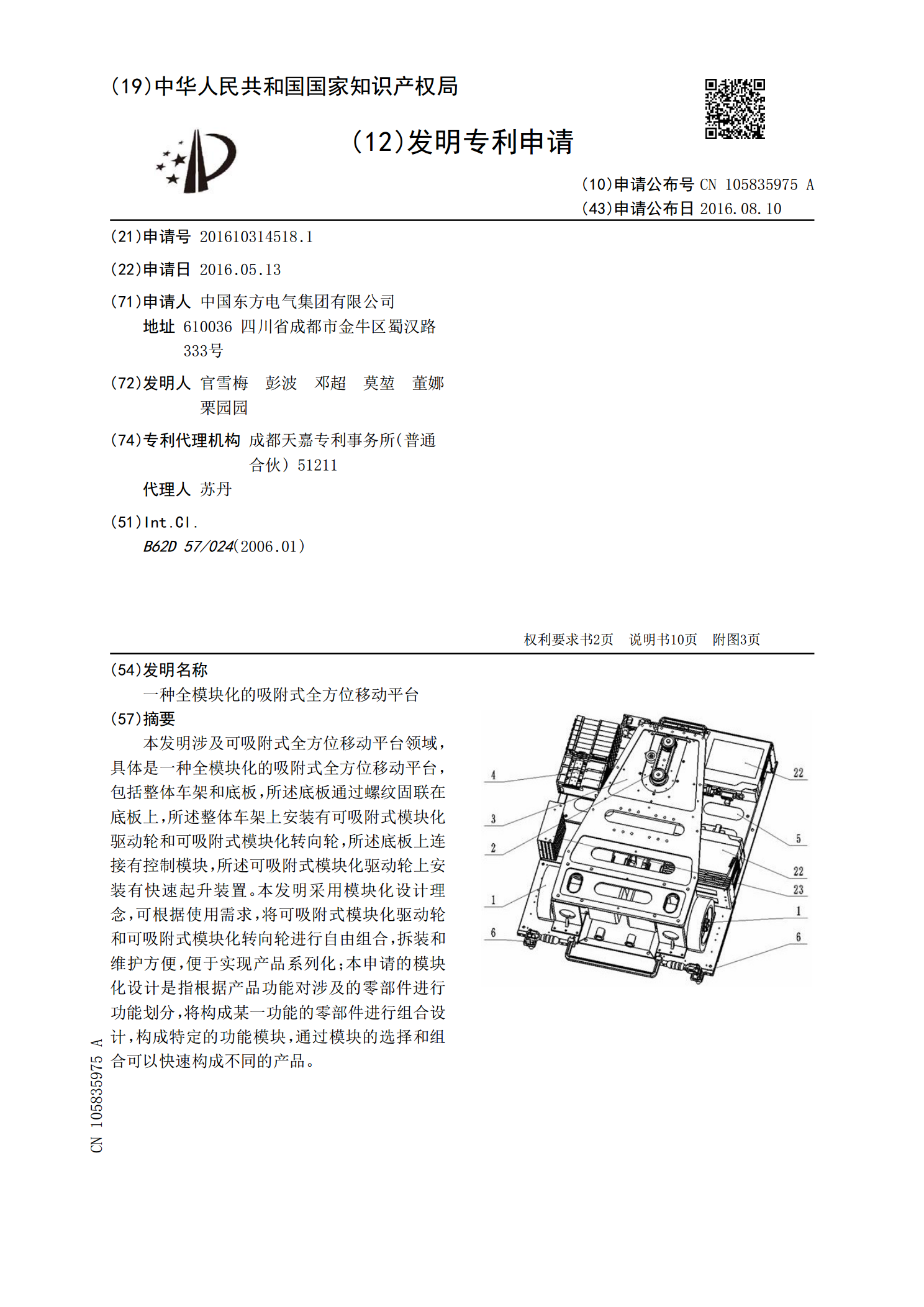
本发明涉及可吸附式全方位移动平台领域,具体是一种全模块化的吸附式全方位移动平台,包括整体车架和底板,所述底板通过螺纹固联在底板上,所述整体车架上安装有可吸附式模块化驱动轮和可吸附式模块化转向轮,所述底板上连接有控制模块,所述可吸附式模块化驱动轮上安装有快速起升装置。本发明采用模块化设计理念,可根据使用需求,将可吸附式模块化驱动轮和可吸附式模块化转向轮进行自由组合,拆装和维护方便,便于实现产品系列化;本申请的模块化设计是指根据产品功能对涉及的零部件进行功能划分,将构成某一功能的零部件进行组合设计,构成特定的
曲面自适应磁吸附装置.pdf
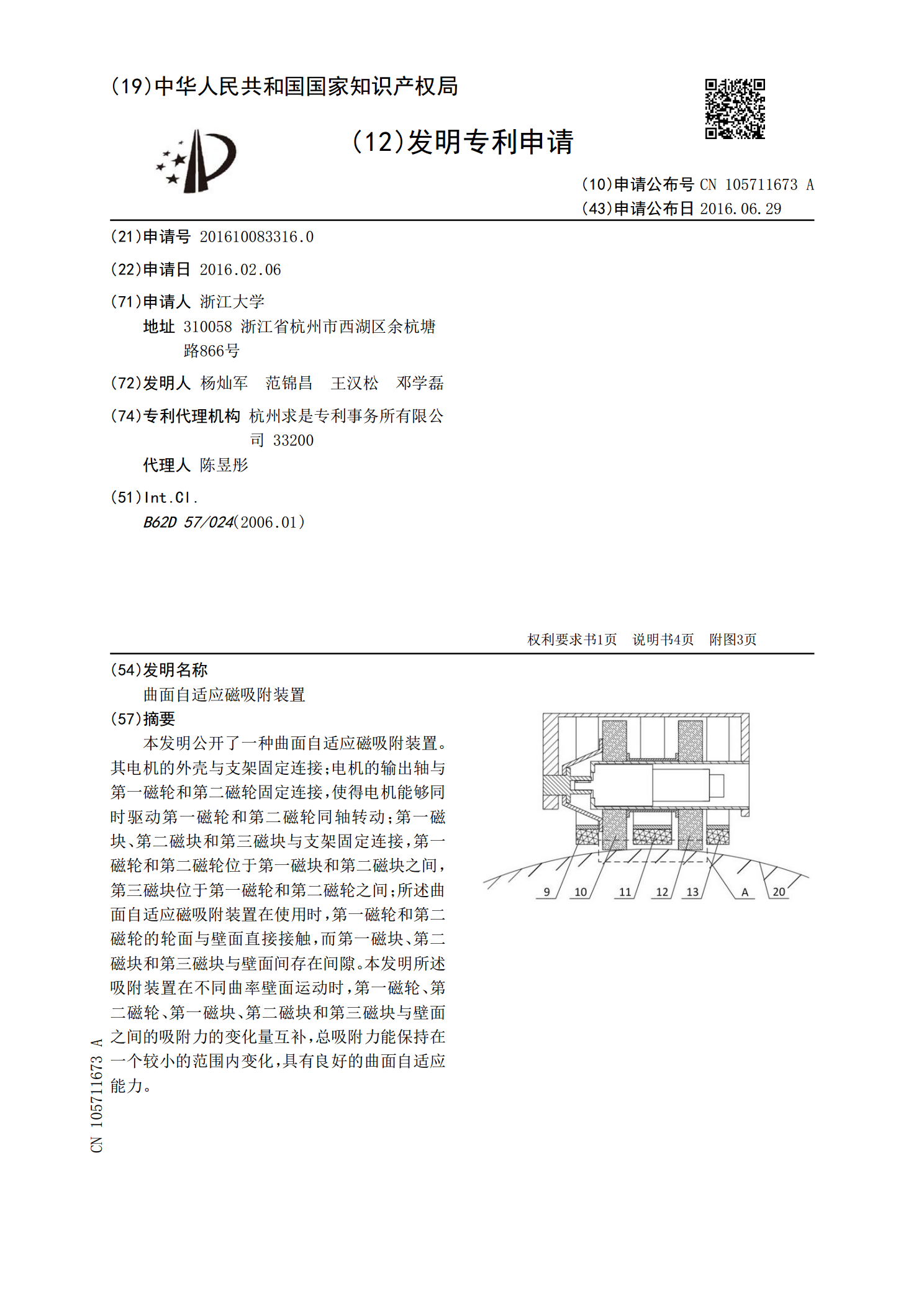
本发明公开了一种曲面自适应磁吸附装置。其电机的外壳与支架固定连接;电机的输出轴与第一磁轮和第二磁轮固定连接,使得电机能够同时驱动第一磁轮和第二磁轮同轴转动;第一磁块、第二磁块和第三磁块与支架固定连接,第一磁轮和第二磁轮位于第一磁块和第二磁块之间,第三磁块位于第一磁轮和第二磁轮之间;所述曲面自适应磁吸附装置在使用时,第一磁轮和第二磁轮的轮面与壁面直接接触,而第一磁块、第二磁块和第三磁块与壁面间存在间隙。本发明所述吸附装置在不同曲率壁面运动时,第一磁轮、第二磁轮、第一磁块、第二磁块和第三磁块与壁面之间的吸附力
多功能吸附式移动平台.pdf
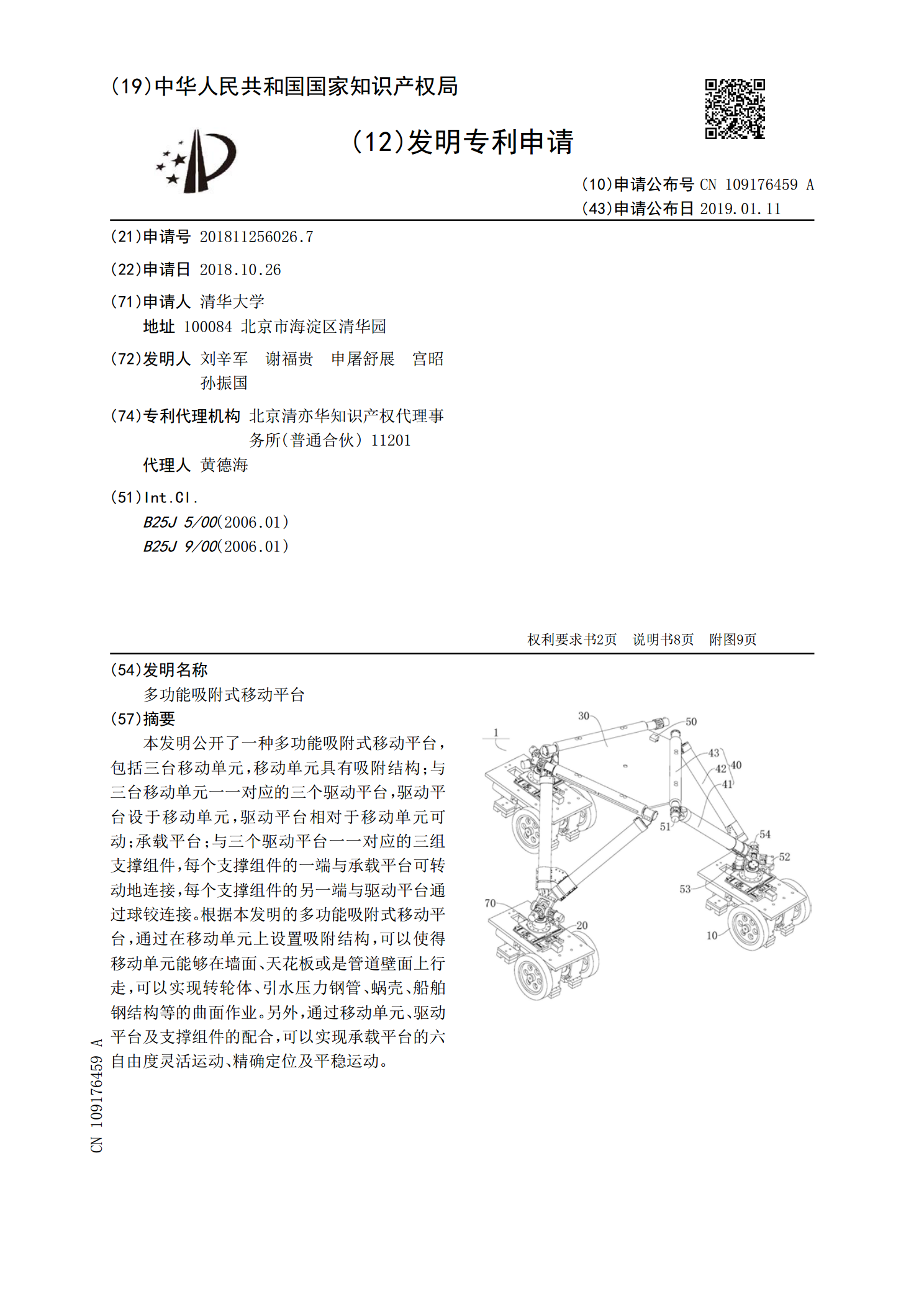
本发明公开了一种多功能吸附式移动平台,包括三台移动单元,移动单元具有吸附结构;与三台移动单元一一对应的三个驱动平台,驱动平台设于移动单元,驱动平台相对于移动单元可动;承载平台;与三个驱动平台一一对应的三组支撑组件,每个支撑组件的一端与承载平台可转动地连接,每个支撑组件的另一端与驱动平台通过球铰连接。根据本发明的多功能吸附式移动平台,通过在移动单元上设置吸附结构,可以使得移动单元能够在墙面、天花板或是管道壁面上行走,可以实现转轮体、引水压力钢管、蜗壳、船舶钢结构等的曲面作业。另外,通过移动单元、驱动平台及支

一种永磁式曲面吸附装置.pdf
本发明公开了一种永磁式曲面吸附装置,包括复合导磁底座、中间隔磁座、上端盖、控磁开关、限位销钉、钢丝绳、导引轮和辅助吸盘:上端盖与中间隔磁座之间设有主动轴、被动轴和换向器;复合导磁底座内设有永磁体;辅助吸盘与复合导磁底座通过转轴相连,且辅助吸盘包括吸盘基体、吸盘永磁体、限位转动体、侧挡板、滑块、滑轨、弹簧和齿轮;钢丝绳一端与所述辅助吸盘内的滑块相连,另一端通过导引轮卷绕于所述换向器的输出轴。该装置利用多个永磁体作为吸附体对曲面进行吸附,避免了电磁铁吸附时可能出现的意外情况,同时,该装置能够实现单轴多吸盘联动