
一种执行末端设有旋转块的机器人.pdf

努力****晓骞


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种执行末端设有旋转块的机器人.pdf
本发明公开了一种执行末端设有旋转块的机器人,所述旋转块安装在执行末端,并由驱动机构驱动,驱动机构包括与旋转块固定连接的旋转座、以滑块作为解锁件的锁扣组件、设有齿段的内齿轮,旋转座与内齿轮偏心设置。常态时,齿段与旋转座上的齿轮无接触,锁扣组件制动旋转座;操作时,旋转的内齿轮上的解锁杆与滑块上的S形导向槽配合,先解除锁扣组件对旋转座的制动,再使锁扣组件复位以制动旋转座,上述过程中,齿段驱动旋转座旋转预定角度。按上述技术方案,旋转块每次旋转的角度一定,以提高机器人动作的精度。
一种设有旋转执行末端的机器人.pdf
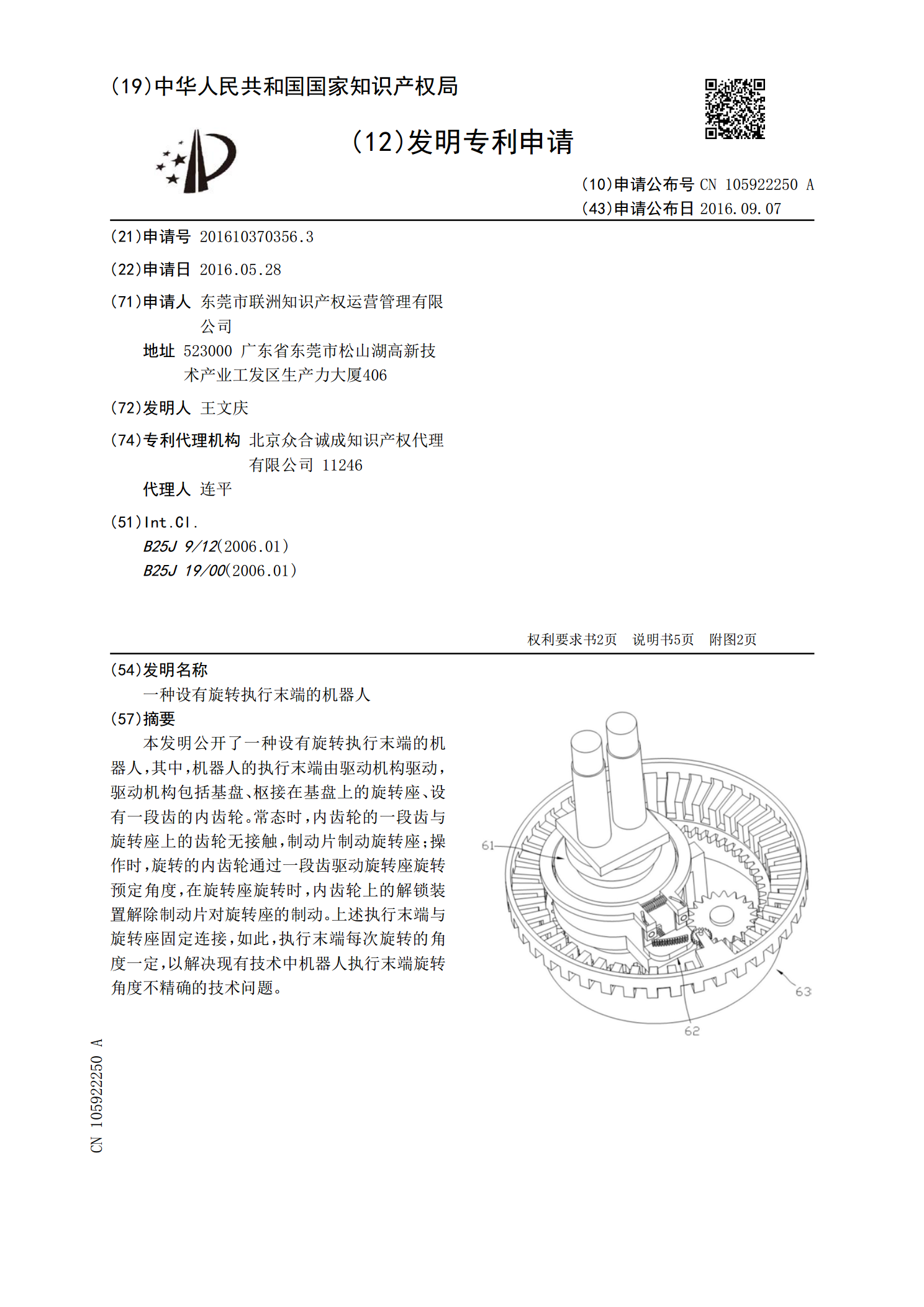
本发明公开了一种设有旋转执行末端的机器人,其中,机器人的执行末端由驱动机构驱动,驱动机构包括基盘、枢接在基盘上的旋转座、设有一段齿的内齿轮。常态时,内齿轮的一段齿与旋转座上的齿轮无接触,制动片制动旋转座;操作时,旋转的内齿轮通过一段齿驱动旋转座旋转预定角度,在旋转座旋转时,内齿轮上的解锁装置解除制动片对旋转座的制动。上述执行末端与旋转座固定连接,如此,执行末端每次旋转的角度一定,以解决现有技术中机器人执行末端旋转角度不精确的技术问题。

一种执行末端设有旋转驱动机构的机器人.pdf
本发明公开了一种执行末端设有旋转驱动机构的机器人,所述驱动机构包括旋转座、以滑块作为解锁件的锁扣组件、设有齿段的内齿轮,旋转座与内齿轮偏心设置。常态时,齿段与旋转座上的齿轮无接触,锁扣组件中的一对制动片制动旋转座;操作时,旋转的内齿轮上的解锁杆与滑块上的S形导向槽配合,滑块平移,其上的楔形块平移,张开一对制动片的一端,以解除对旋转座的制动,之后,滑块复位,弹簧使制动片复位以制动旋转座;上述过程中,齿段驱动旋转座旋转预定角度。按上述技术方案,解锁杆与S形导向槽的配合可驱使滑块作一来回往复直线运动。
一种执行末端旋转角度固定的机器人.pdf
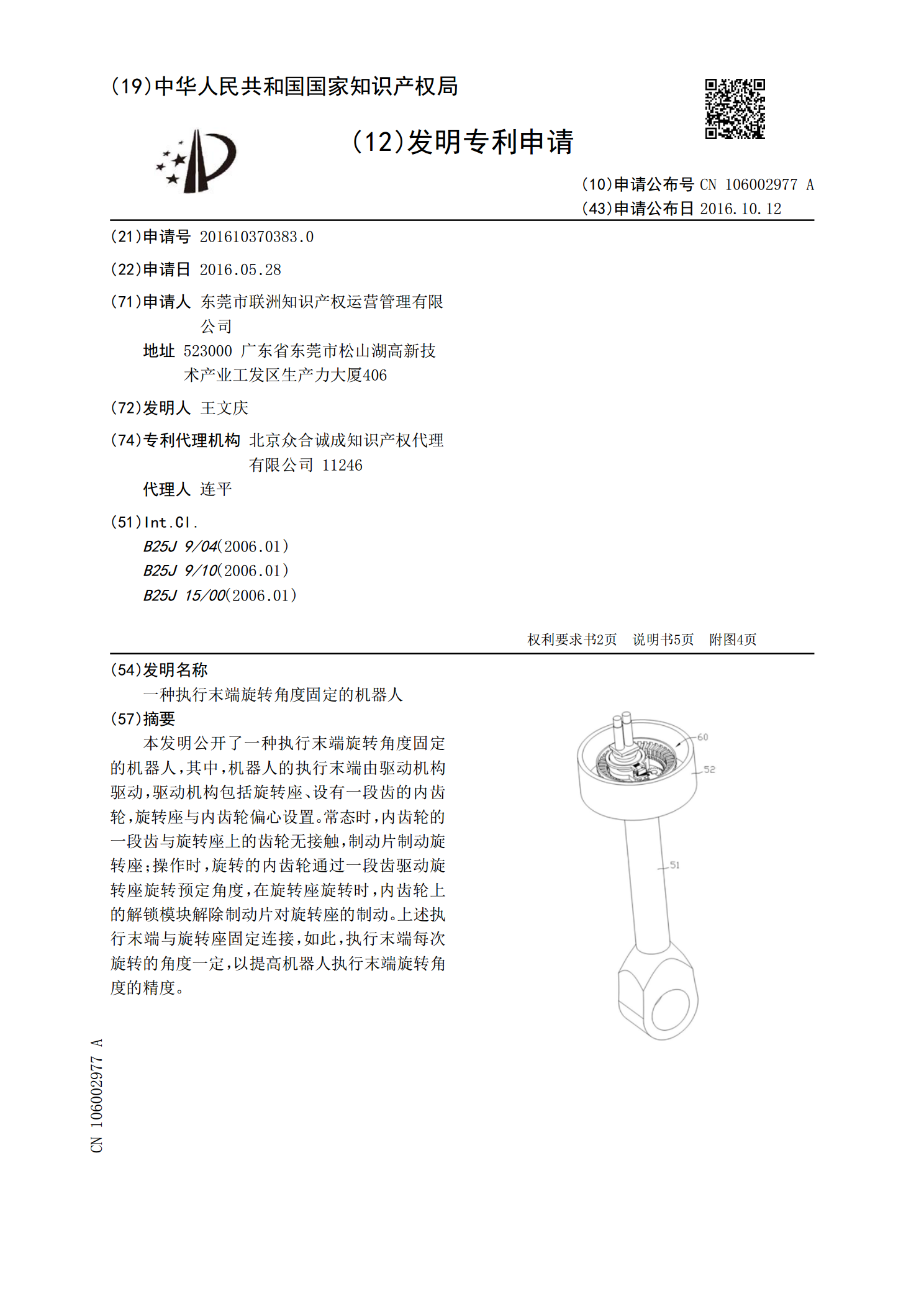
本发明公开了一种执行末端旋转角度固定的机器人,其中,机器人的执行末端由驱动机构驱动,驱动机构包括旋转座、设有一段齿的内齿轮,旋转座与内齿轮偏心设置。常态时,内齿轮的一段齿与旋转座上的齿轮无接触,制动片制动旋转座;操作时,旋转的内齿轮通过一段齿驱动旋转座旋转预定角度,在旋转座旋转时,内齿轮上的解锁模块解除制动片对旋转座的制动。上述执行末端与旋转座固定连接,如此,执行末端每次旋转的角度一定,以提高机器人执行末端旋转角度的精度。

一种机器人末端执行器.pdf
本发明提出了一种机器人末端执行器,其包括上盖、主分流块、辅分流块、齿轮齿条、齿轮轴、套筒和手抓连接块;所述主分流块两侧设置有贯穿其内部的主分流块气口,所述气口与上盖的气道连通,所述齿轮轴的一端设置在主分流块内并且与主分流块气口连通,另一端设置有气孔并且设置在辅分流块内,所述辅分流块内设有与手抓连接块连通的气道;所述齿轮齿条设置在套筒内并且与齿轮轴的齿条啮合。本发明的一种机器人末端执行器,实现了内部走气避免了外部走气容易发生的气管剐蹭打结现象,提高了机器人手腕手爪功能部件的可靠性。