
一种机器人末端执行器.pdf

书生****ma


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人末端执行器.pdf
本发明提出了一种机器人末端执行器,其包括上盖、主分流块、辅分流块、齿轮齿条、齿轮轴、套筒和手抓连接块;所述主分流块两侧设置有贯穿其内部的主分流块气口,所述气口与上盖的气道连通,所述齿轮轴的一端设置在主分流块内并且与主分流块气口连通,另一端设置有气孔并且设置在辅分流块内,所述辅分流块内设有与手抓连接块连通的气道;所述齿轮齿条设置在套筒内并且与齿轮轴的齿条啮合。本发明的一种机器人末端执行器,实现了内部走气避免了外部走气容易发生的气管剐蹭打结现象,提高了机器人手腕手爪功能部件的可靠性。
机器人末端执行器.pdf
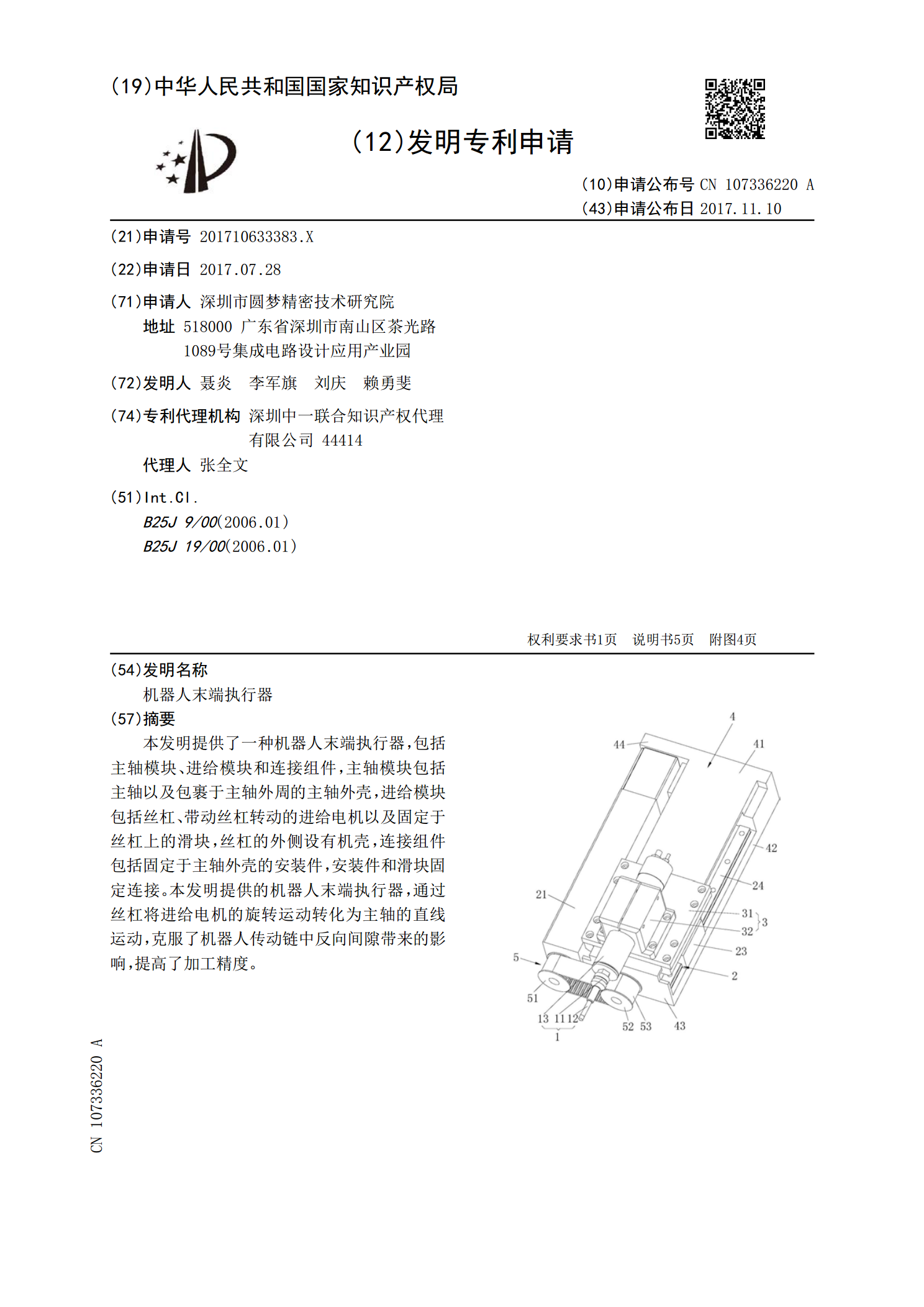
本发明提供了一种机器人末端执行器,包括主轴模块、进给模块和连接组件,主轴模块包括主轴以及包裹于主轴外周的主轴外壳,进给模块包括丝杠、带动丝杠转动的进给电机以及固定于丝杠上的滑块,丝杠的外侧设有机壳,连接组件包括固定于主轴外壳的安装件,安装件和滑块固定连接。本发明提供的机器人末端执行器,通过丝杠将进给电机的旋转运动转化为主轴的直线运动,克服了机器人传动链中反向间隙带来的影响,提高了加工精度。
一种柑橘采摘机器人的末端执行器.pdf
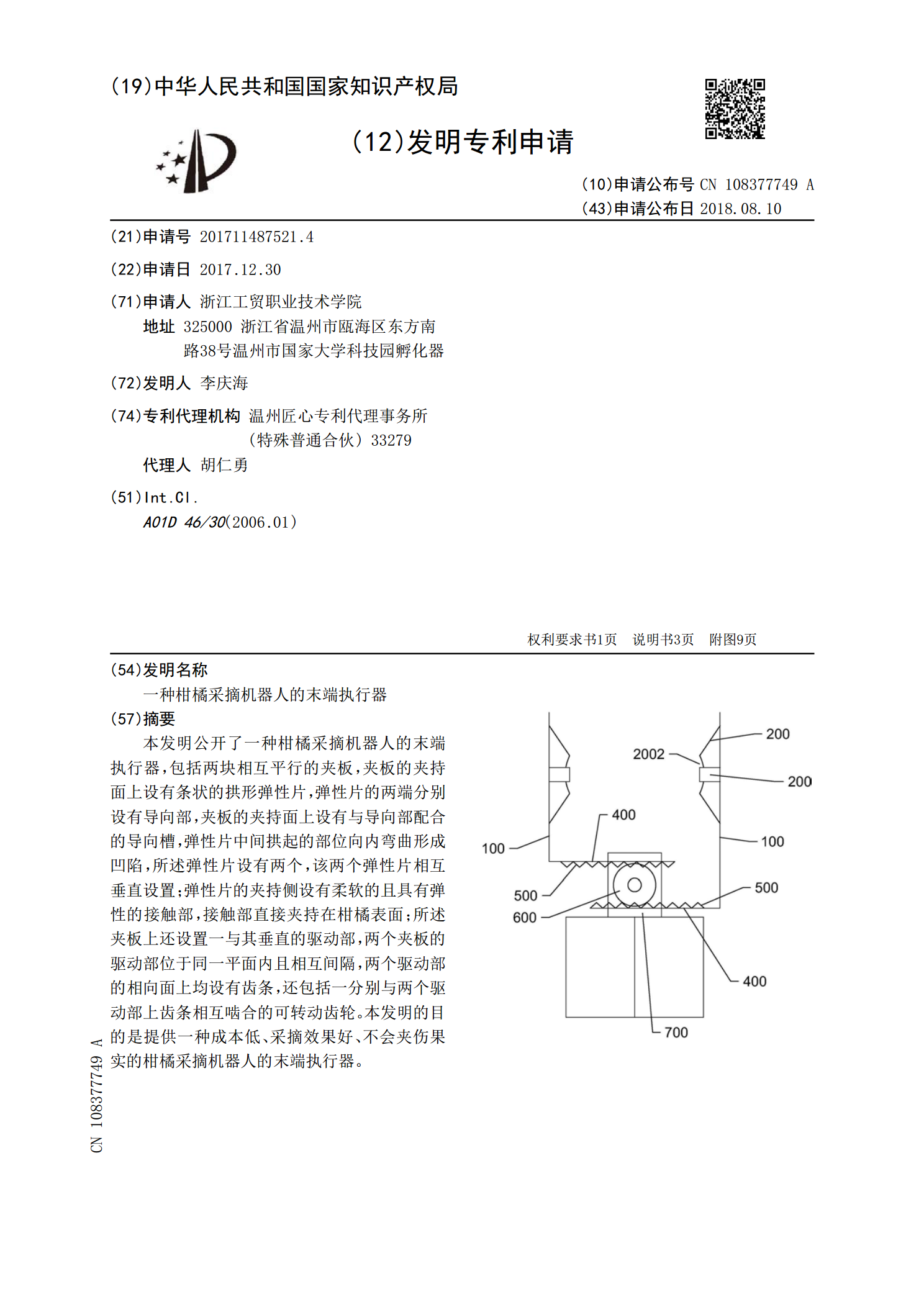
本发明公开了一种柑橘采摘机器人的末端执行器,包括两块相互平行的夹板,夹板的夹持面上设有条状的拱形弹性片,弹性片的两端分别设有导向部,夹板的夹持面上设有与导向部配合的导向槽,弹性片中间拱起的部位向内弯曲形成凹陷,所述弹性片设有两个,该两个弹性片相互垂直设置;弹性片的夹持侧设有柔软的且具有弹性的接触部,接触部直接夹持在柑橘表面;所述夹板上还设置一与其垂直的驱动部,两个夹板的驱动部位于同一平面内且相互间隔,两个驱动部的相向面上均设有齿条,还包括一分别与两个驱动部上齿条相互啮合的可转动齿轮。本发明的目的是提供一种

一种水果采摘机器人末端执行器.pdf
一种水果采摘机器人的末端执行器随着科技的不断进步,机器人技术正在越来越广泛地应用于各种领域。其中,水果采摘领域也不例外。水果采摘机器人的末端执行器是实现采摘水果的关键部分,它能够通过精确的操作,快速、高效地完成水果采摘任务。一、末端执行器的设计水果采摘机器人的末端执行器一般采用机械手或机器人手臂的设计。它通常由多个关节组成,具有高度的灵活性和操作性。末端执行器可以通过感应器来感知水果的位置和形状,并通过复杂的算法来确定最佳的采摘路径。二、末端执行器的操作流程1、感应水果:末端执行器使用感应器来探测水果的位

一种水果采摘机器人末端执行器.pdf
一种水果采摘机器人末端执行器一种水果采摘机器人的末端执行器随着科技的不断进步,机器人技术正在越来越广泛地应用于各种领域。其中,水果采摘领域也不例外。水果采摘机器人的末端执行器是实现采摘水果的关键部分,它能够通过精确的操作,快速、高效地完成水果采摘任务。一、末端执行器的设计水果采摘机器人的末端执行器一般采用机械手或机器人手臂的设计。它通常由多个关节组成,具有高度的灵活性和操作性。末端执行器可以通过感应器来感知水果的位置和形状,并通过复杂的算法来确定最佳的采摘路径。二、末端执行器的操作流程1、感应水果:末端执