
一种执行末端旋转角度固定的机器人.pdf

佳晨****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种执行末端旋转角度固定的机器人.pdf
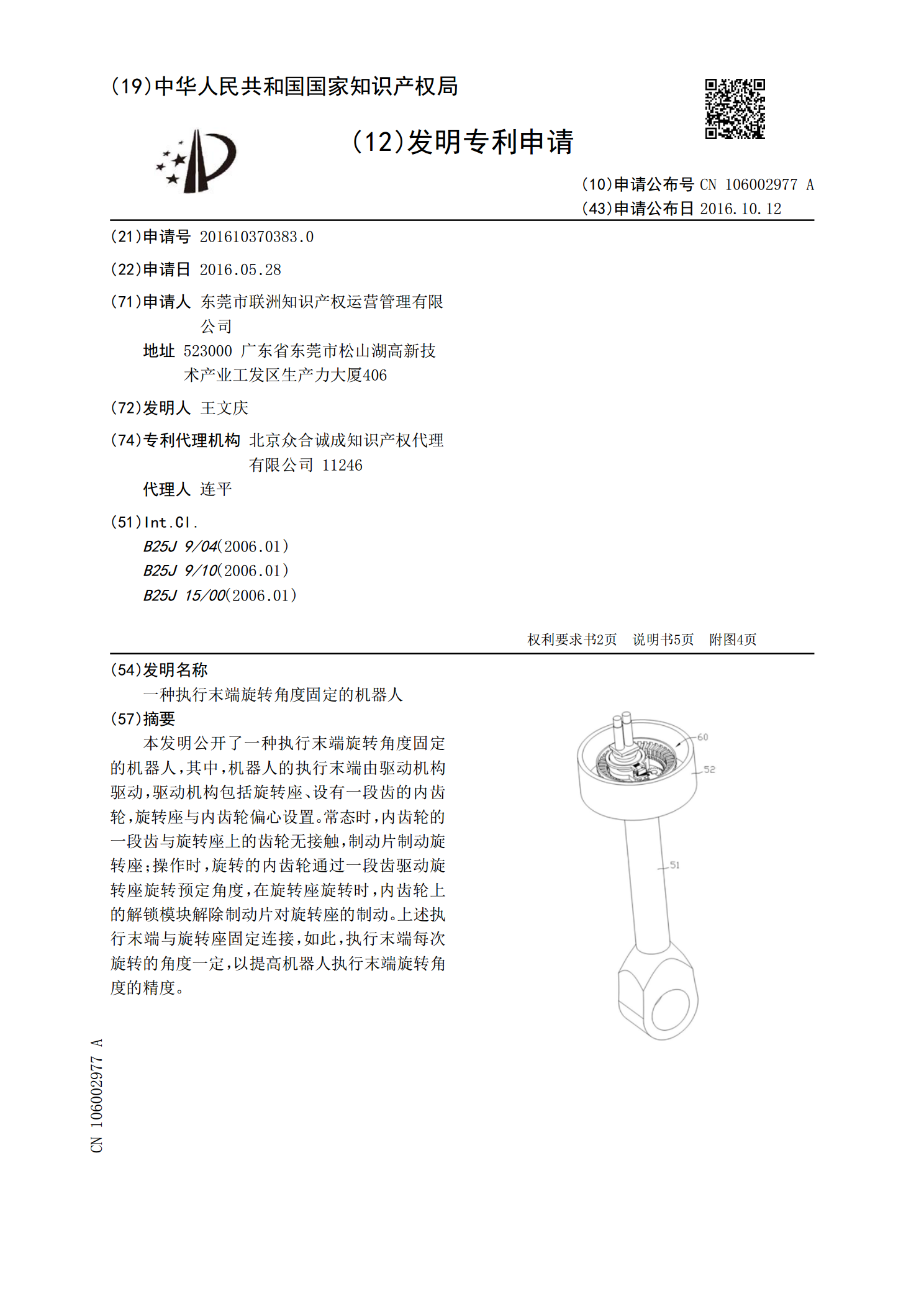
本发明公开了一种执行末端旋转角度固定的机器人,其中,机器人的执行末端由驱动机构驱动,驱动机构包括旋转座、设有一段齿的内齿轮,旋转座与内齿轮偏心设置。常态时,内齿轮的一段齿与旋转座上的齿轮无接触,制动片制动旋转座;操作时,旋转的内齿轮通过一段齿驱动旋转座旋转预定角度,在旋转座旋转时,内齿轮上的解锁模块解除制动片对旋转座的制动。上述执行末端与旋转座固定连接,如此,执行末端每次旋转的角度一定,以提高机器人执行末端旋转角度的精度。
一种设有旋转执行末端的机器人.pdf
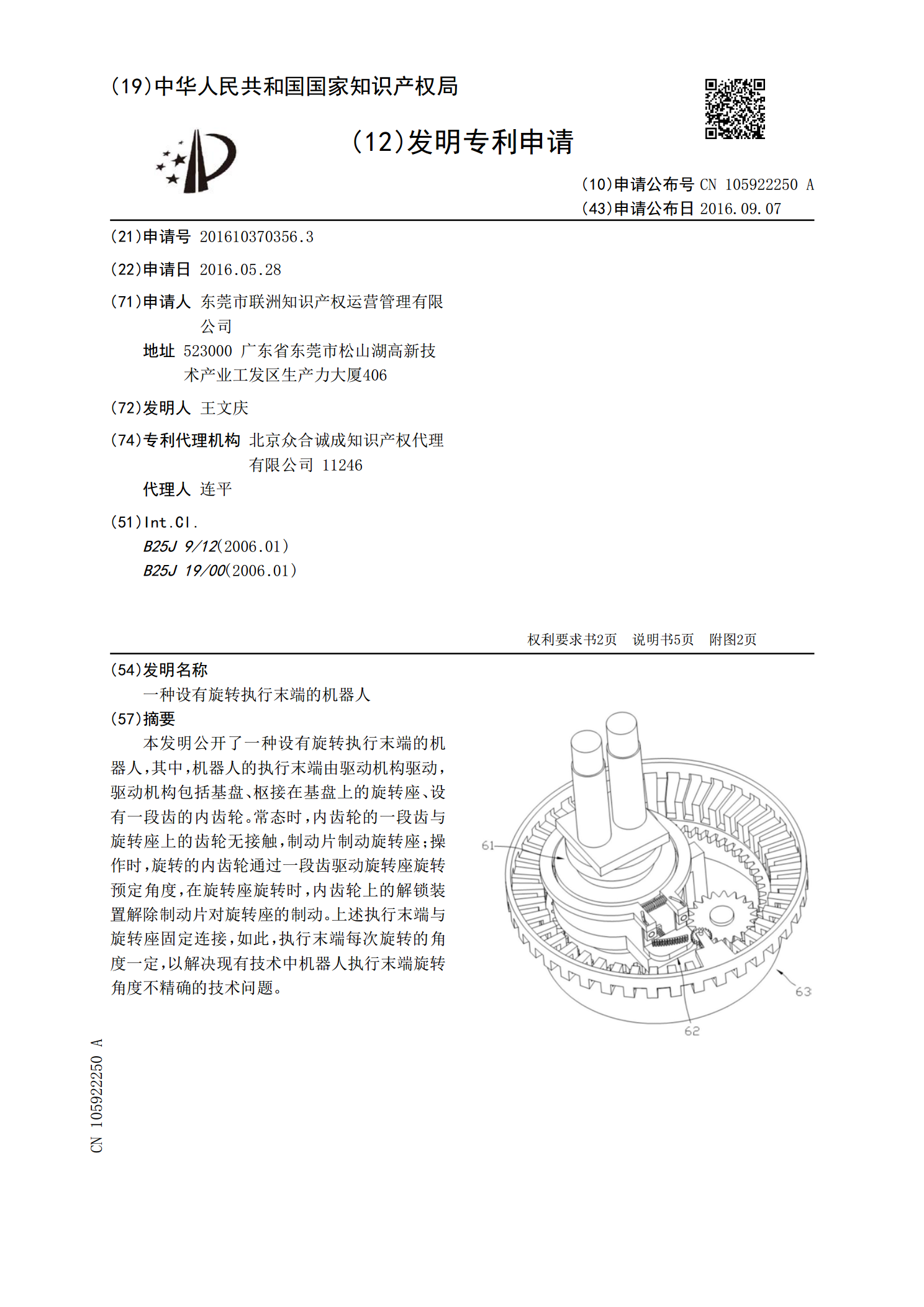
本发明公开了一种设有旋转执行末端的机器人,其中,机器人的执行末端由驱动机构驱动,驱动机构包括基盘、枢接在基盘上的旋转座、设有一段齿的内齿轮。常态时,内齿轮的一段齿与旋转座上的齿轮无接触,制动片制动旋转座;操作时,旋转的内齿轮通过一段齿驱动旋转座旋转预定角度,在旋转座旋转时,内齿轮上的解锁装置解除制动片对旋转座的制动。上述执行末端与旋转座固定连接,如此,执行末端每次旋转的角度一定,以解决现有技术中机器人执行末端旋转角度不精确的技术问题。

一种执行末端设有旋转块的机器人.pdf
本发明公开了一种执行末端设有旋转块的机器人,所述旋转块安装在执行末端,并由驱动机构驱动,驱动机构包括与旋转块固定连接的旋转座、以滑块作为解锁件的锁扣组件、设有齿段的内齿轮,旋转座与内齿轮偏心设置。常态时,齿段与旋转座上的齿轮无接触,锁扣组件制动旋转座;操作时,旋转的内齿轮上的解锁杆与滑块上的S形导向槽配合,先解除锁扣组件对旋转座的制动,再使锁扣组件复位以制动旋转座,上述过程中,齿段驱动旋转座旋转预定角度。按上述技术方案,旋转块每次旋转的角度一定,以提高机器人动作的精度。

一种执行末端设有旋转驱动机构的机器人.pdf
本发明公开了一种执行末端设有旋转驱动机构的机器人,所述驱动机构包括旋转座、以滑块作为解锁件的锁扣组件、设有齿段的内齿轮,旋转座与内齿轮偏心设置。常态时,齿段与旋转座上的齿轮无接触,锁扣组件中的一对制动片制动旋转座;操作时,旋转的内齿轮上的解锁杆与滑块上的S形导向槽配合,滑块平移,其上的楔形块平移,张开一对制动片的一端,以解除对旋转座的制动,之后,滑块复位,弹簧使制动片复位以制动旋转座;上述过程中,齿段驱动旋转座旋转预定角度。按上述技术方案,解锁杆与S形导向槽的配合可驱使滑块作一来回往复直线运动。
一种固定角度旋转机构.pdf
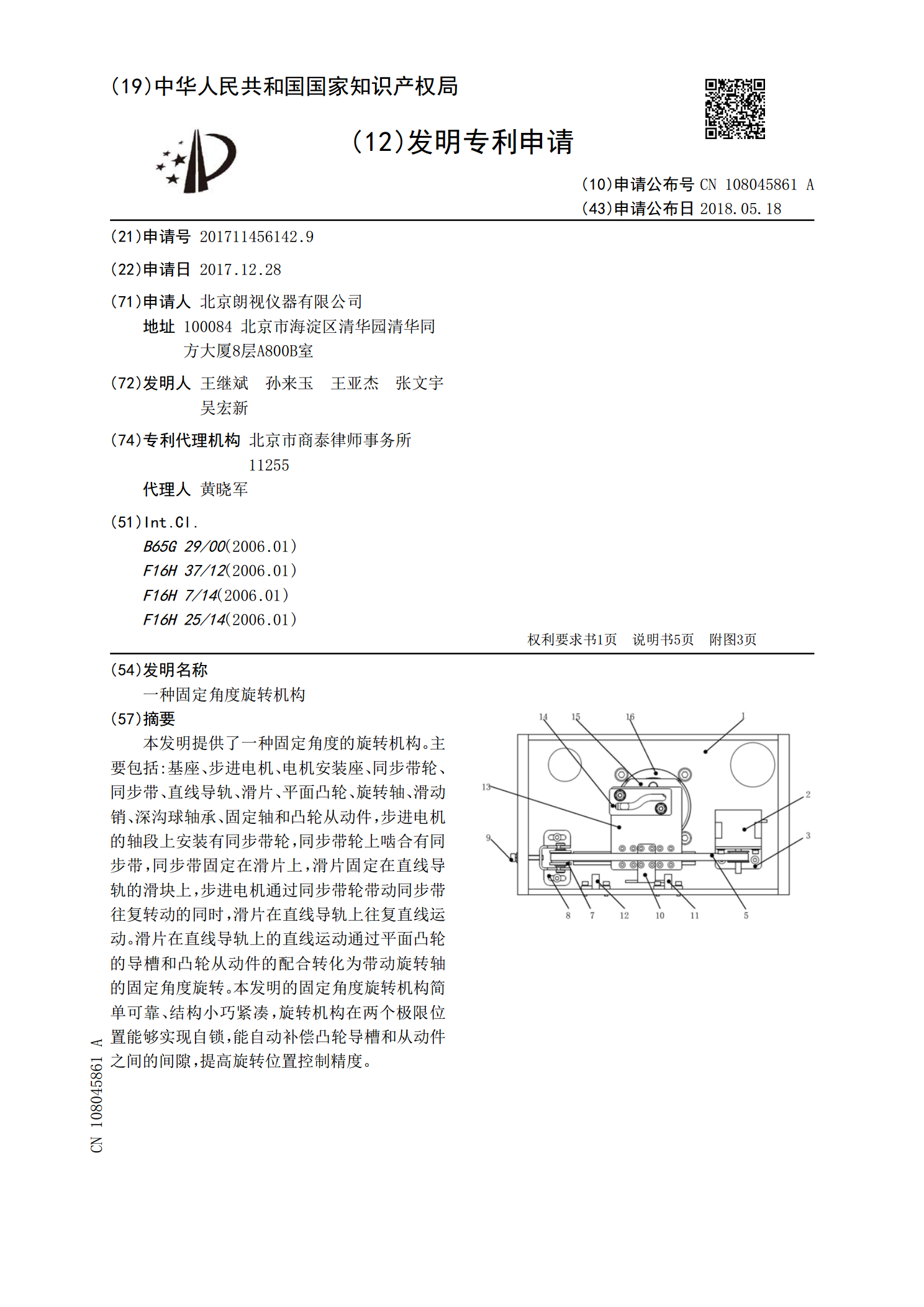
本发明提供了一种固定角度的旋转机构。主要包括:基座、步进电机、电机安装座、同步带轮、同步带、直线导轨、滑片、平面凸轮、旋转轴、滑动销、深沟球轴承、固定轴和凸轮从动件,步进电机的轴段上安装有同步带轮,同步带轮上啮合有同步带,同步带固定在滑片上,滑片固定在直线导轨的滑块上,步进电机通过同步带轮带动同步带往复转动的同时,滑片在直线导轨上往复直线运动。滑片在直线导轨上的直线运动通过平面凸轮的导槽和凸轮从动件的配合转化为带动旋转轴的固定角度旋转。本发明的固定角度旋转机构简单可靠、结构小巧紧凑,旋转机构在两个极限位置