
一体化飞轮减摇器及实现方法.pdf

一吃****新冬

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一体化飞轮减摇器及实现方法.pdf
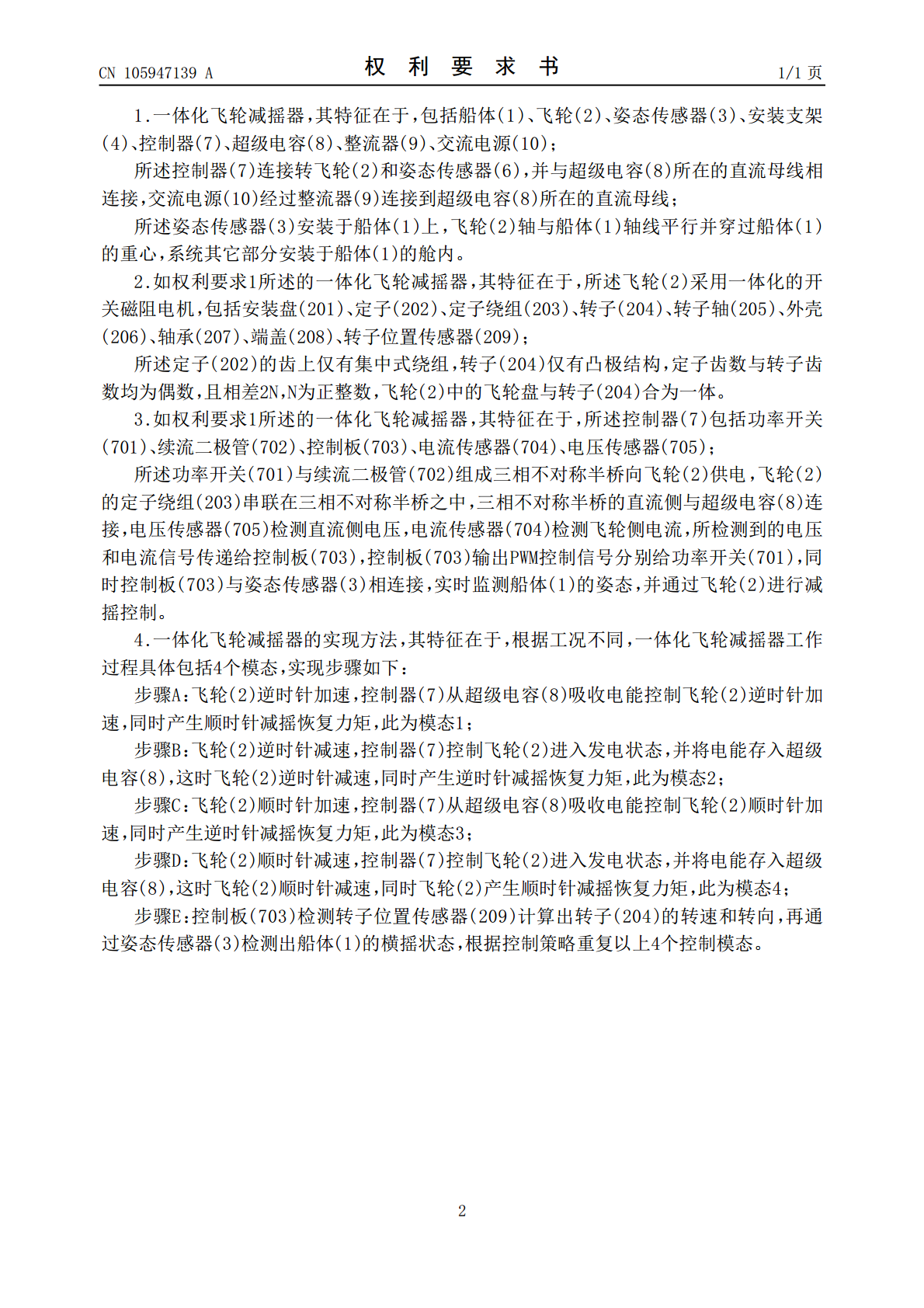
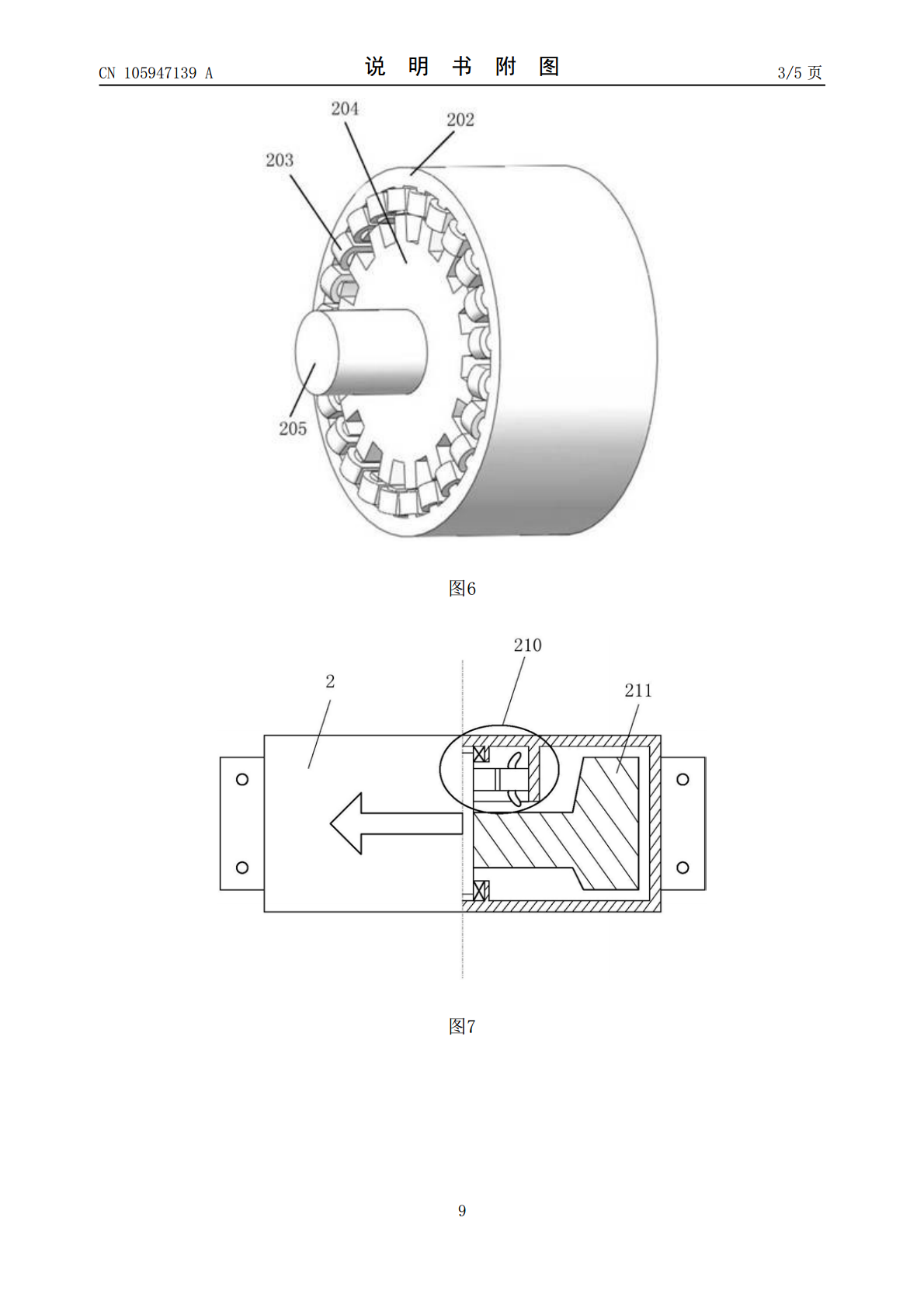
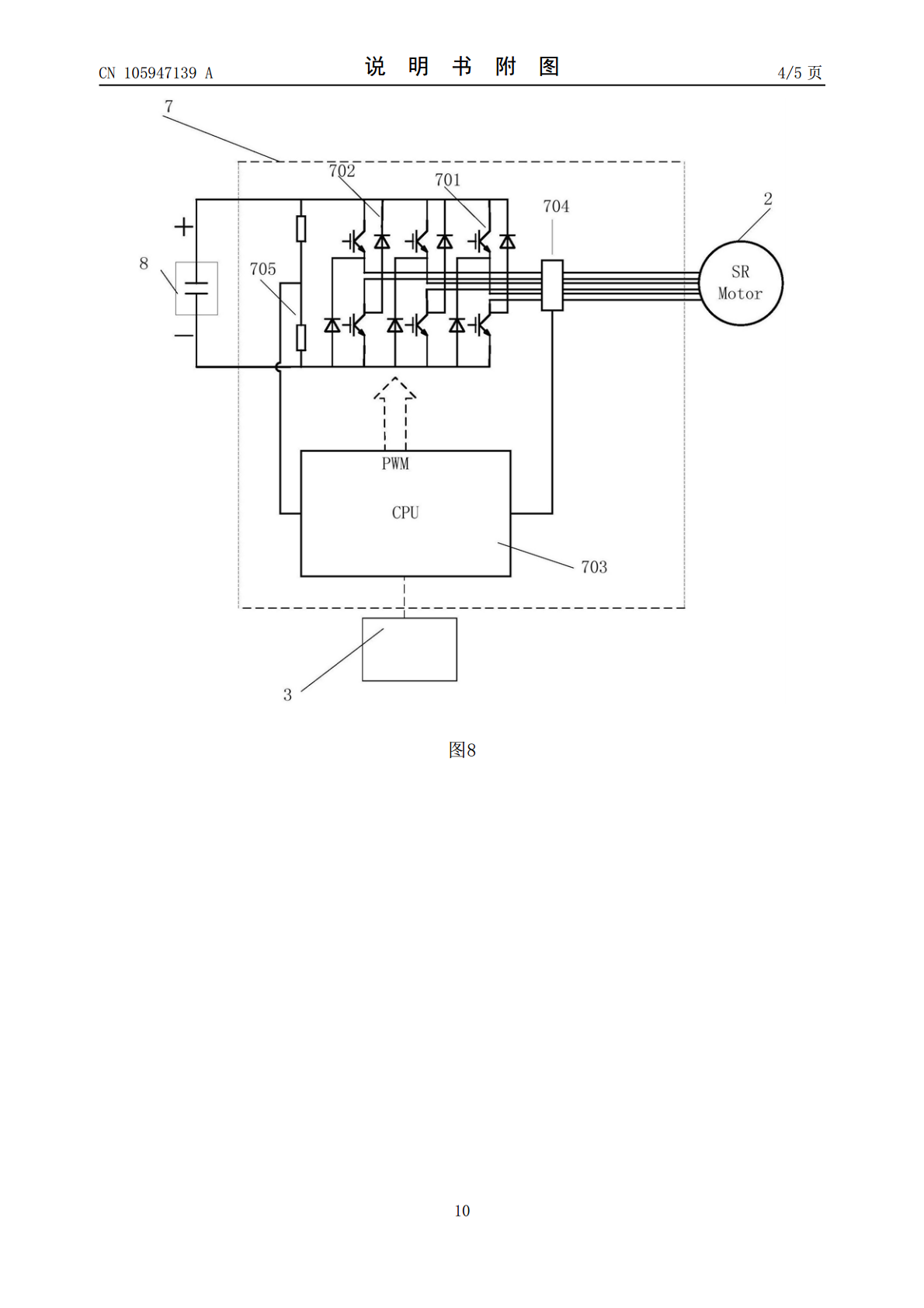
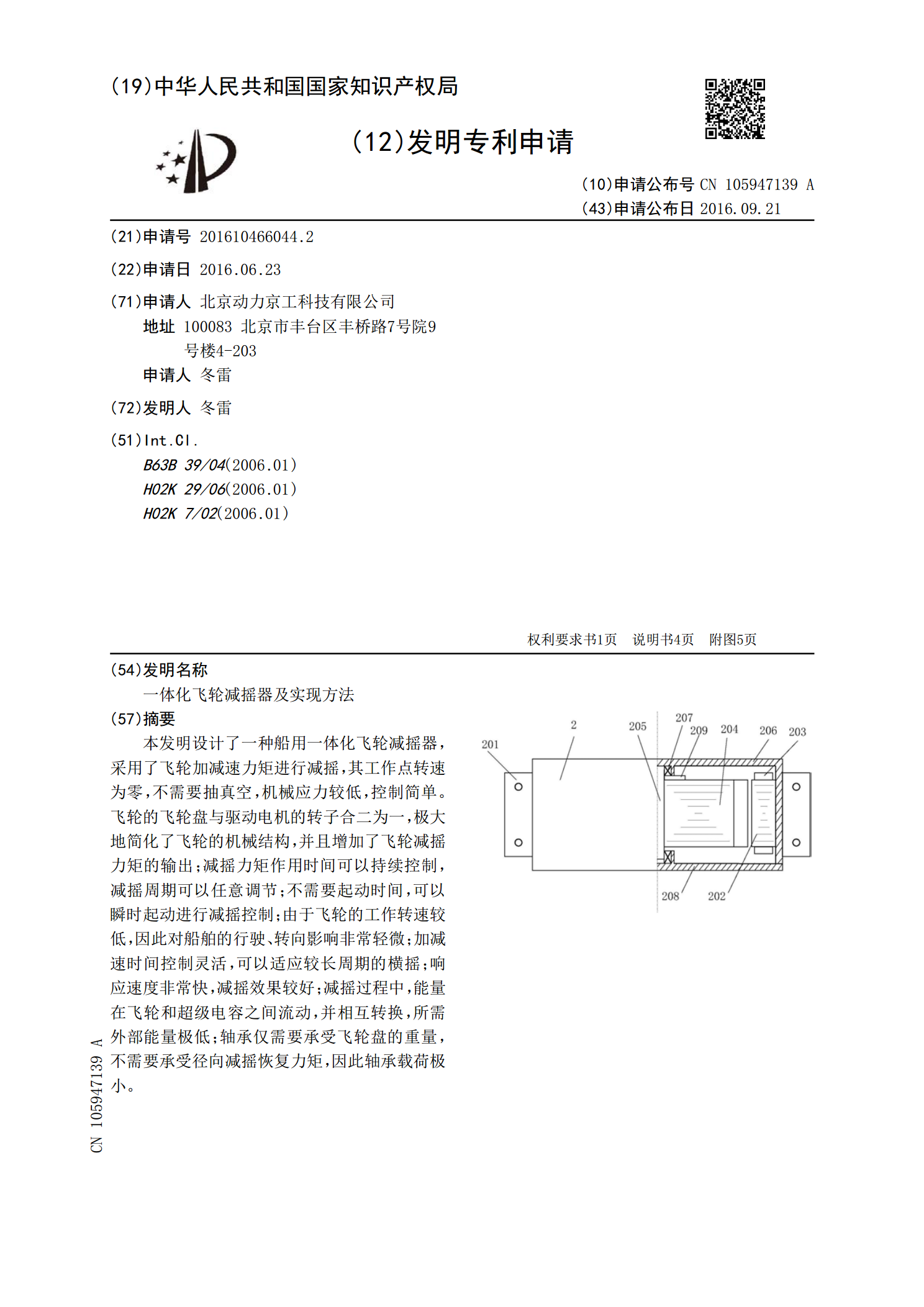
本发明设计了一种船用一体化飞轮减摇器,采用了飞轮加减速力矩进行减摇,其工作点转速为零,不需要抽真空,机械应力较低,控制简单。飞轮的飞轮盘与驱动电机的转子合二为一,极大地简化了飞轮的机械结构,并且增加了飞轮减摇力矩的输出;减摇力矩作用时间可以持续控制,减摇周期可以任意调节;不需要起动时间,可以瞬时起动进行减摇控制;由于飞轮的工作转速较低,因此对船舶的行驶、转向影响非常轻微;加减速时间控制灵活,可以适应较长周期的横摇;响应速度非常快,减摇效果较好;减摇过程中,能量在飞轮和超级电容之间流动,并相互转换,所需外部
一种双飞轮减摇器及其减摇实现方法.pdf
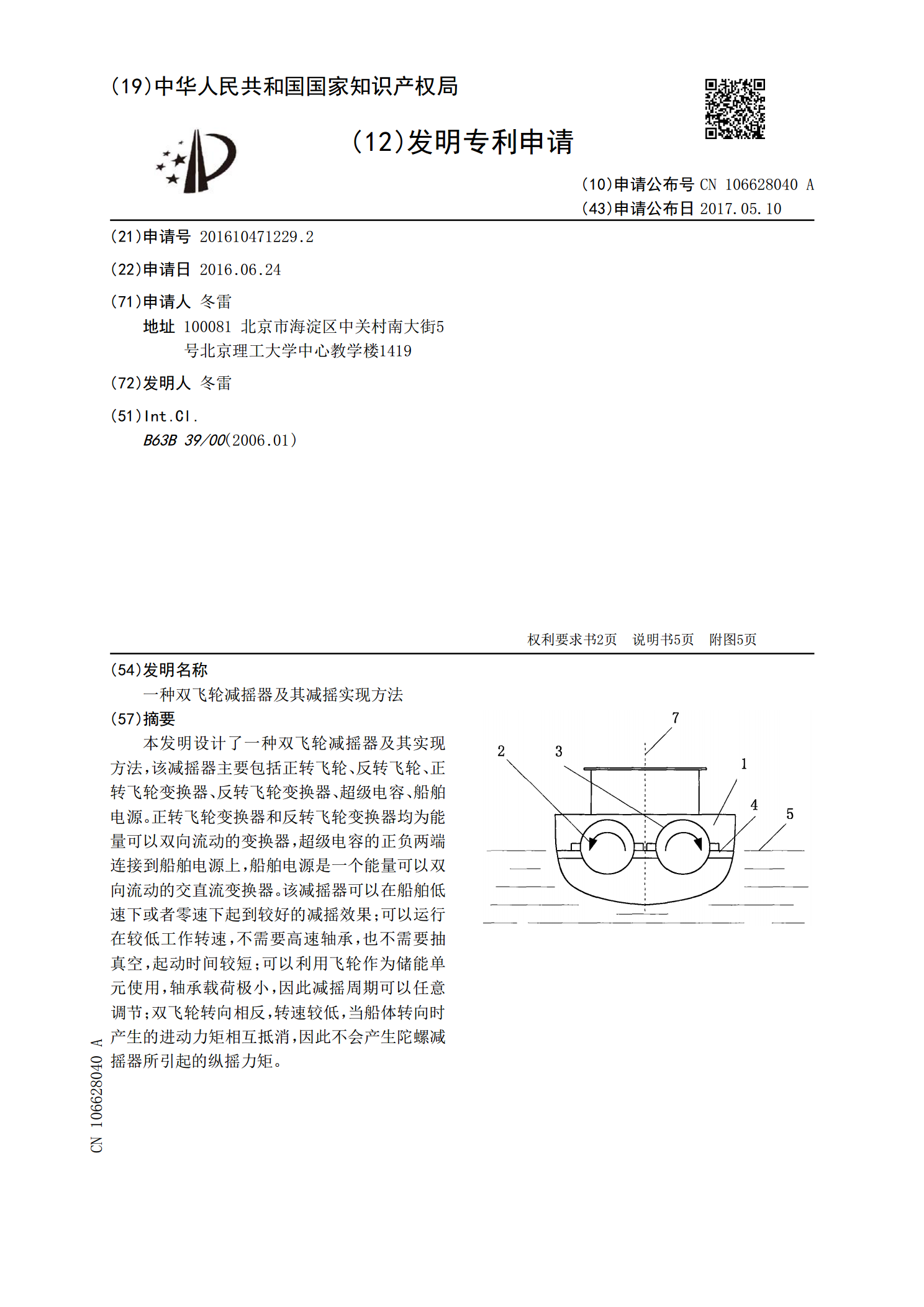
本发明设计了一种双飞轮减摇器及其实现方法,该减摇器主要包括正转飞轮、反转飞轮、正转飞轮变换器、反转飞轮变换器、超级电容、船舶电源。正转飞轮变换器和反转飞轮变换器均为能量可以双向流动的变换器,超级电容的正负两端连接到船舶电源上,船舶电源是一个能量可以双向流动的交直流变换器。该减摇器可以在船舶低速下或者零速下起到较好的减摇效果;可以运行在较低工作转速,不需要高速轴承,也不需要抽真空,起动时间较短;可以利用飞轮作为储能单元使用,轴承载荷极小,因此减摇周期可以任意调节;双飞轮转向相反,转速较低,当船体转向时产生的

动态船舶减摇器.pdf
本发明涉及动态船舶减摇器,原动机驱动主轴转动,主轴呈中空状,主轴转动式地装配于机座,主轴下端伸出机座之外,与转动盘的上部固接;沿主轴轴向内部穿伸传动轴,传动轴的上端伸出主轴之外与推力方向控制器相连,下部可转动地穿过转动盘的上部,并与处于转动盘内的中心齿轮固接,传动轴的下端与转动盘的下部转动配合;转动盘内转动配合数根桨叶轴,桨叶轴穿过桨叶齿轮的中部,两者固接而连动,桨叶齿轮通过传动件与中心齿轮相连;桨叶轴的下端伸出转动盘的下部,与桨叶的一端固接;转动盘转动一周,桨叶绕自身轴线旋转半周。本发明成对安装于船舶舭

一种船用飞轮储能与减摇一体化控制装置.pdf
本发明设计了一种船用飞轮储能与减摇一体化控制装置,包括正转飞轮、反转飞轮、正转飞轮控制器、反转飞轮控制器、系统控制器、姿态传感器、超级电容、太阳能控制器、太阳能电池板、双向逆变器、交流电源/负载、双向直流变换器、直流电源/负载。采用正反转双飞轮结构,减摇过程中,能量在两个飞轮中流动,所需外部能量极低;当船舶转向时,所产生的力矩相互抵消,因此不会引起纵摇,也不会增加行驶阻力。利用太阳能电池发电并储存在飞轮中,可以在船舶主机不起动的状态下向船舶供电,进行减摇控制;采用飞轮储能,没有二次污染,使用寿命长可达20
一种组合式飞轮及减摇陀螺.pdf
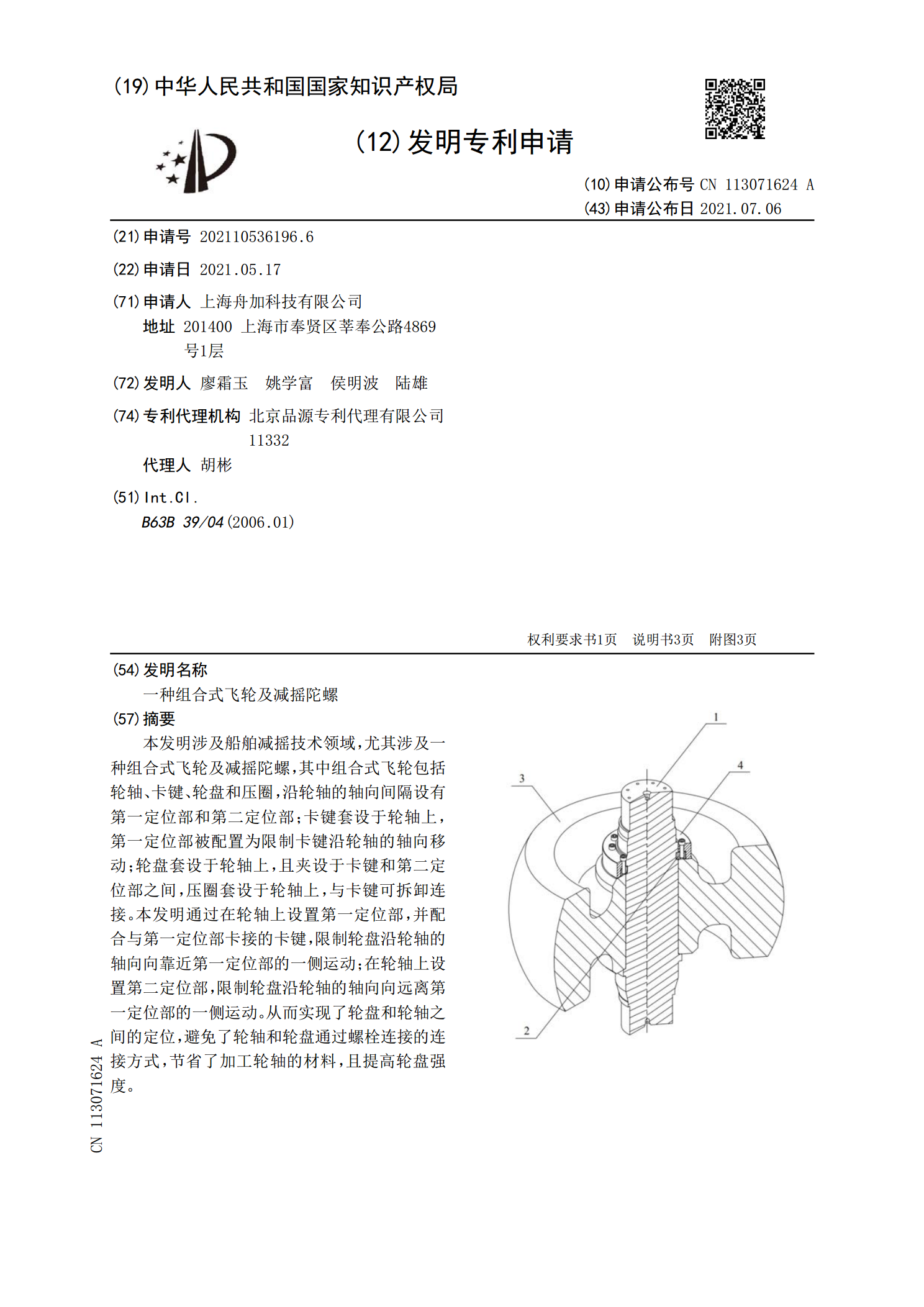
本发明涉及船舶减摇技术领域,尤其涉及一种组合式飞轮及减摇陀螺,其中组合式飞轮包括轮轴、卡键、轮盘和压圈,沿轮轴的轴向间隔设有第一定位部和第二定位部;卡键套设于轮轴上,第一定位部被配置为限制卡键沿轮轴的轴向移动;轮盘套设于轮轴上,且夹设于卡键和第二定位部之间,压圈套设于轮轴上,与卡键可拆卸连接。本发明通过在轮轴上设置第一定位部,并配合与第一定位部卡接的卡键,限制轮盘沿轮轴的轴向向靠近第一定位部的一侧运动;在轮轴上设置第二定位部,限制轮盘沿轮轴的轴向向远离第一定位部的一侧运动。从而实现了轮盘和轮轴之间的定位,