
绳传动象鼻仿生机械臂.pdf

努力****凌芹

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

绳传动象鼻仿生机械臂.pdf
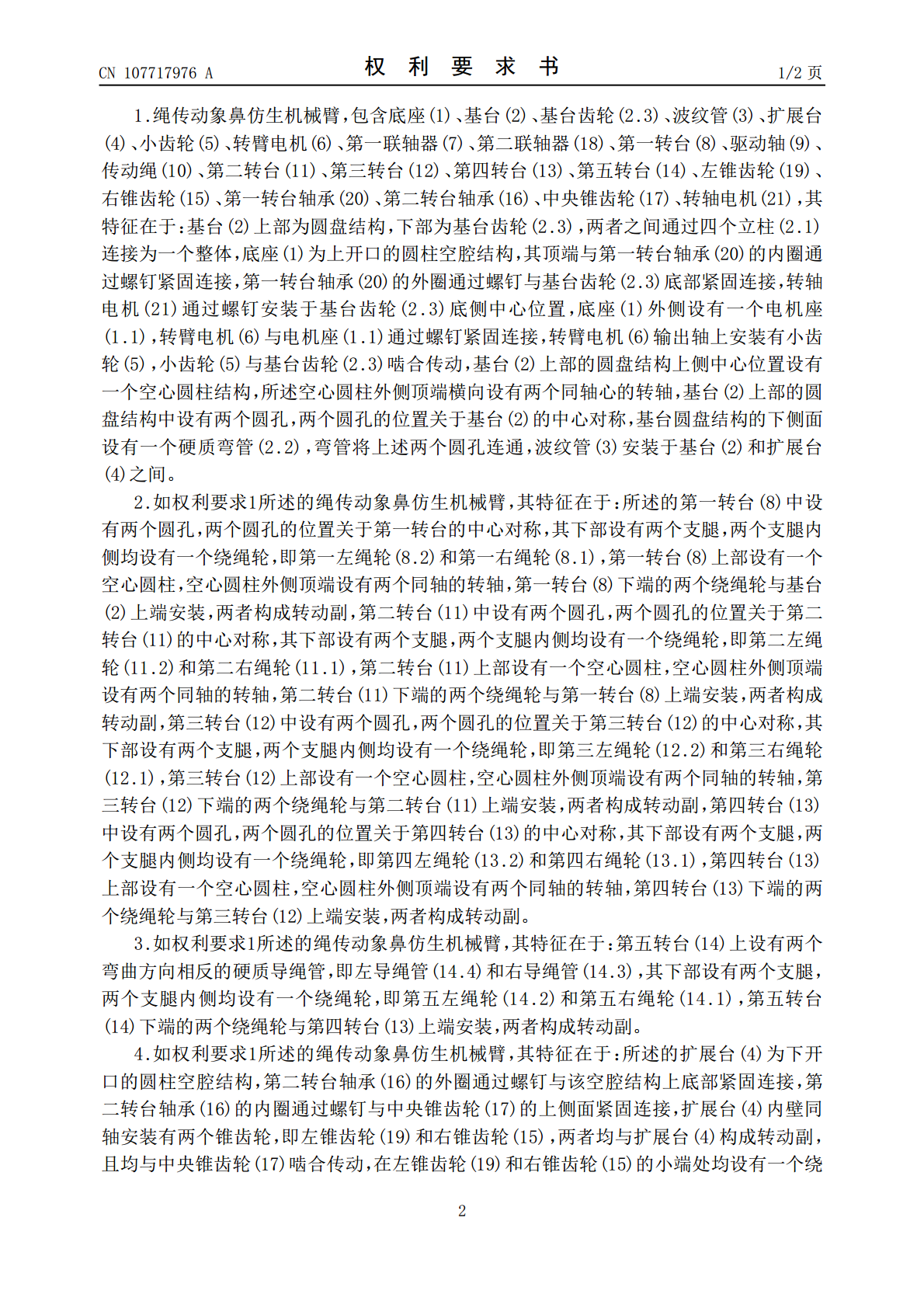
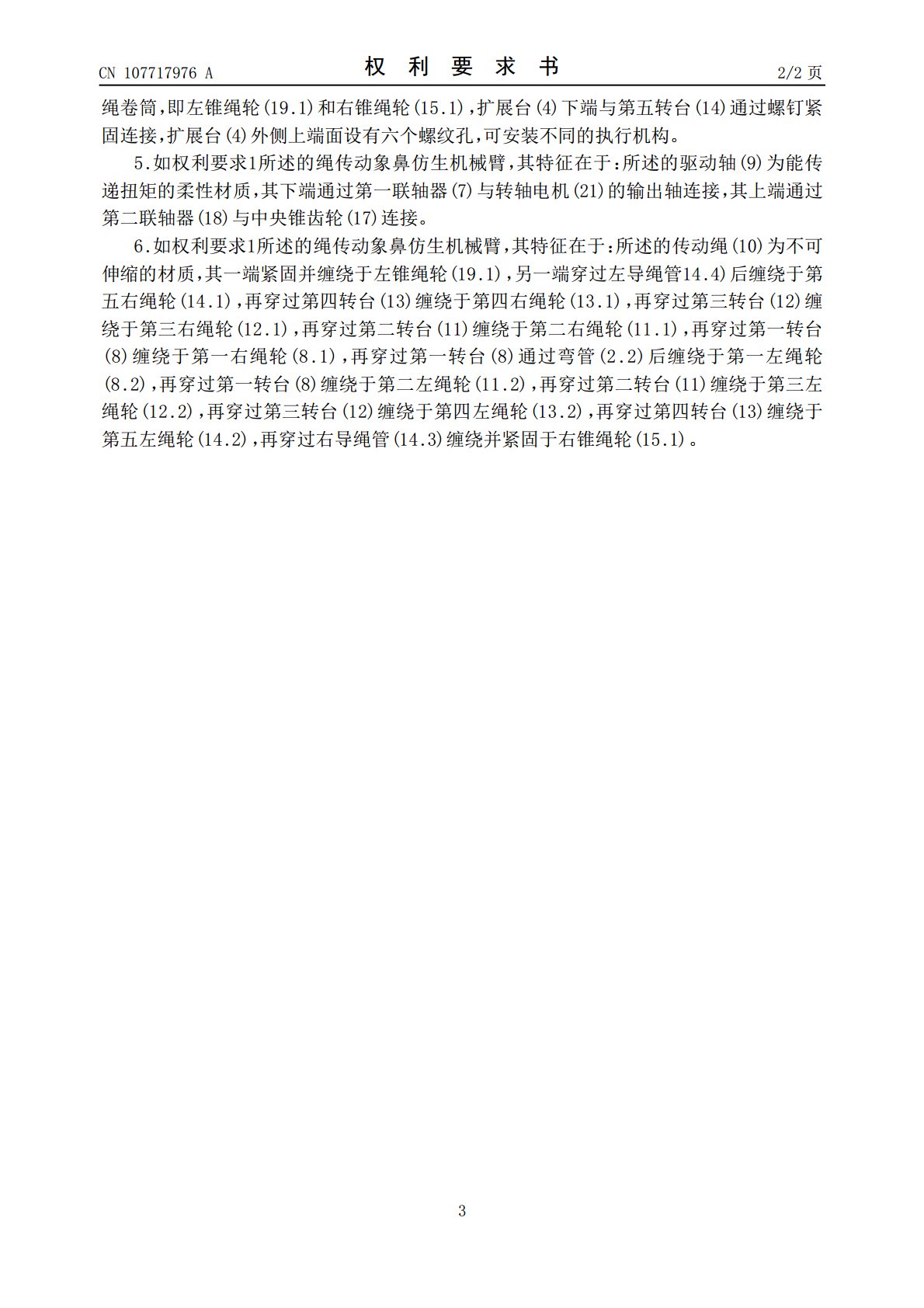
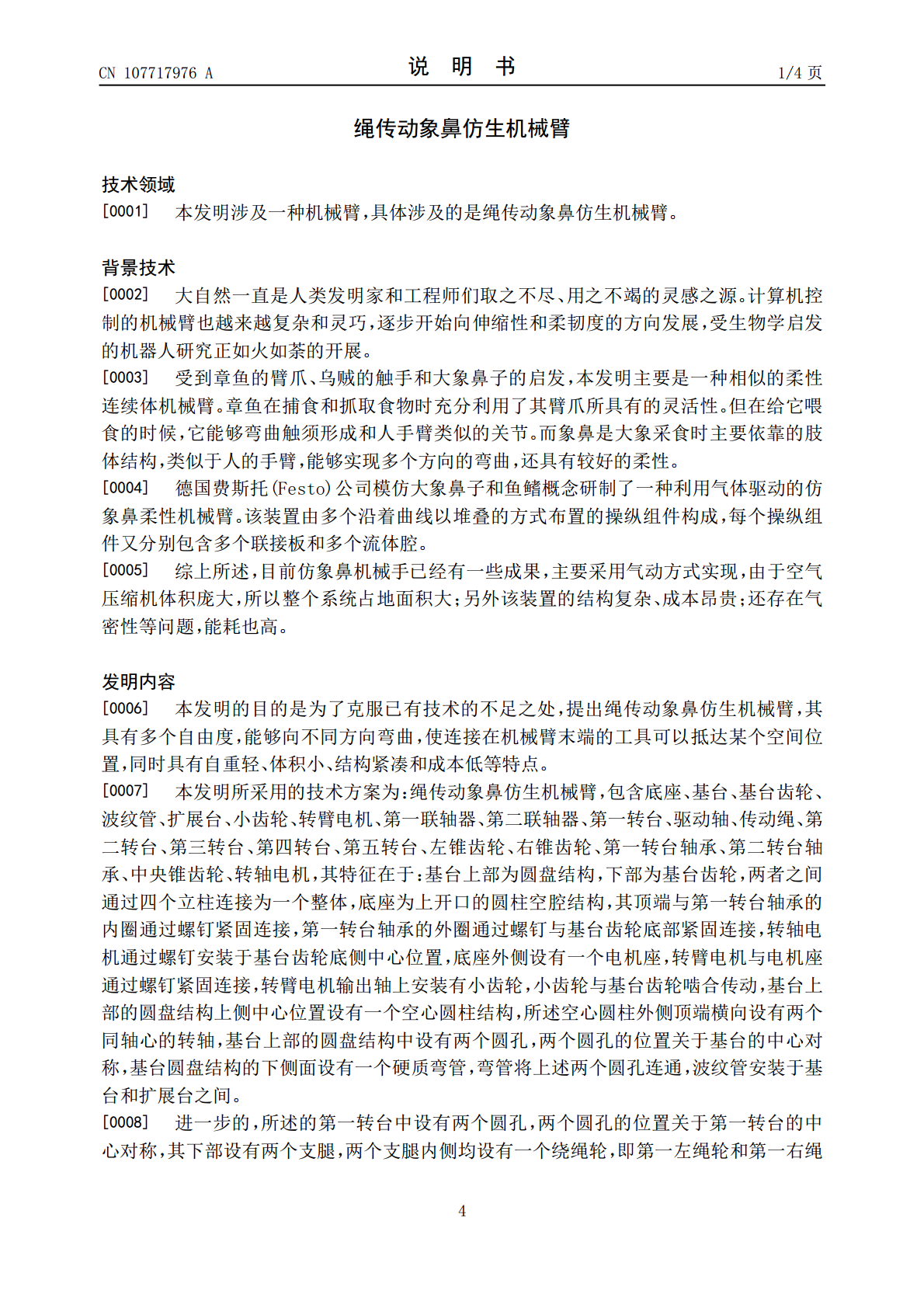
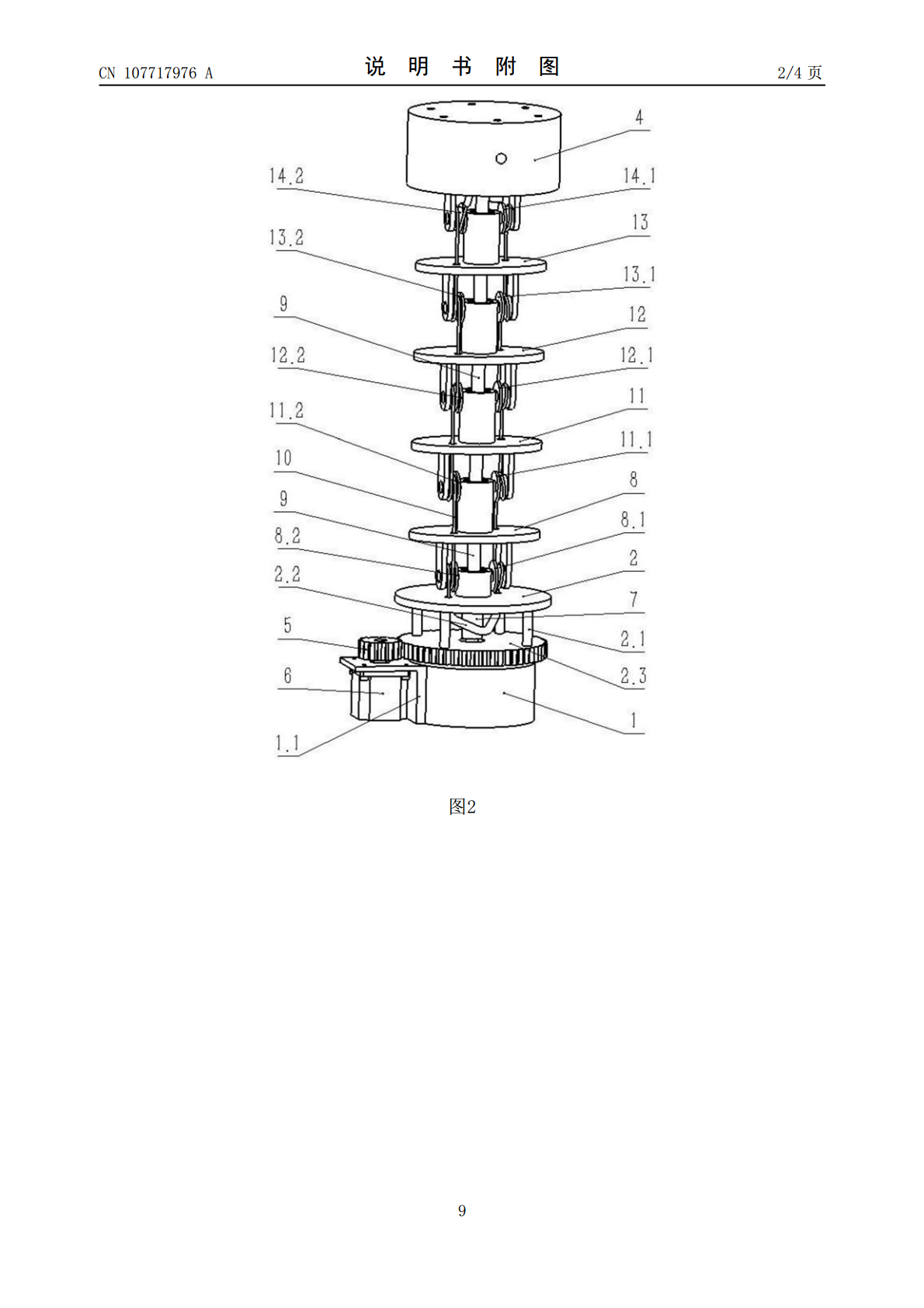
本发明公开绳传动象鼻仿生机械臂,包含底座、基台、波纹管、扩展台、小齿轮、转臂电机、转轴电机、两个联轴器、五个转台、驱动轴、传动绳、三个锥齿轮、两个转台轴承,底座与基台之间安装有一个转台轴承,相邻的两个转台构成转动副,扩展台与中央锥齿轮之间安装有一个转台轴承,左锥齿轮和右锥齿轮均与中央锥齿轮构成轮齿啮合关系,驱动轴为能传递扭矩的柔性材质,其下端与转轴电机的输出轴连接,其上端与中央锥齿轮连接,扩展台上端面设有六个螺纹孔,可安装不同的执行机构,传动绳一端固定于左锥绳轮,另一端固定于右锥绳轮,并依次缠绕于各转台下

一种绳驱动机械臂的传动绳预紧装置.pdf
本发明涉及绳驱动机器人领域。目的是提供一种绳驱动机械臂的传动绳预紧装置,该装置应具有结构简单、调节方便、可靠性好的特点。技术方案是:一种绳驱动机械臂的传动绳预紧装置,其特征在于:该装置包括固定在基板上的预紧块安装板、可转动地定位在预紧块安装板上的第一导向轮、可滑动地定位在预紧块安装板上的预紧块、可转动地定位在预紧块上的第二导向轮、用于推动预紧块沿着预紧块安装板表面移动的调节机构;所述调节机构包括固定在预紧块安装板上的连接块、设置在预紧块上的调节孔、可转动地定位在连接块上并与调节孔螺纹啮合的调节螺栓。
一种绳驱动外骨骼机械臂的绳传动滑轮.pdf
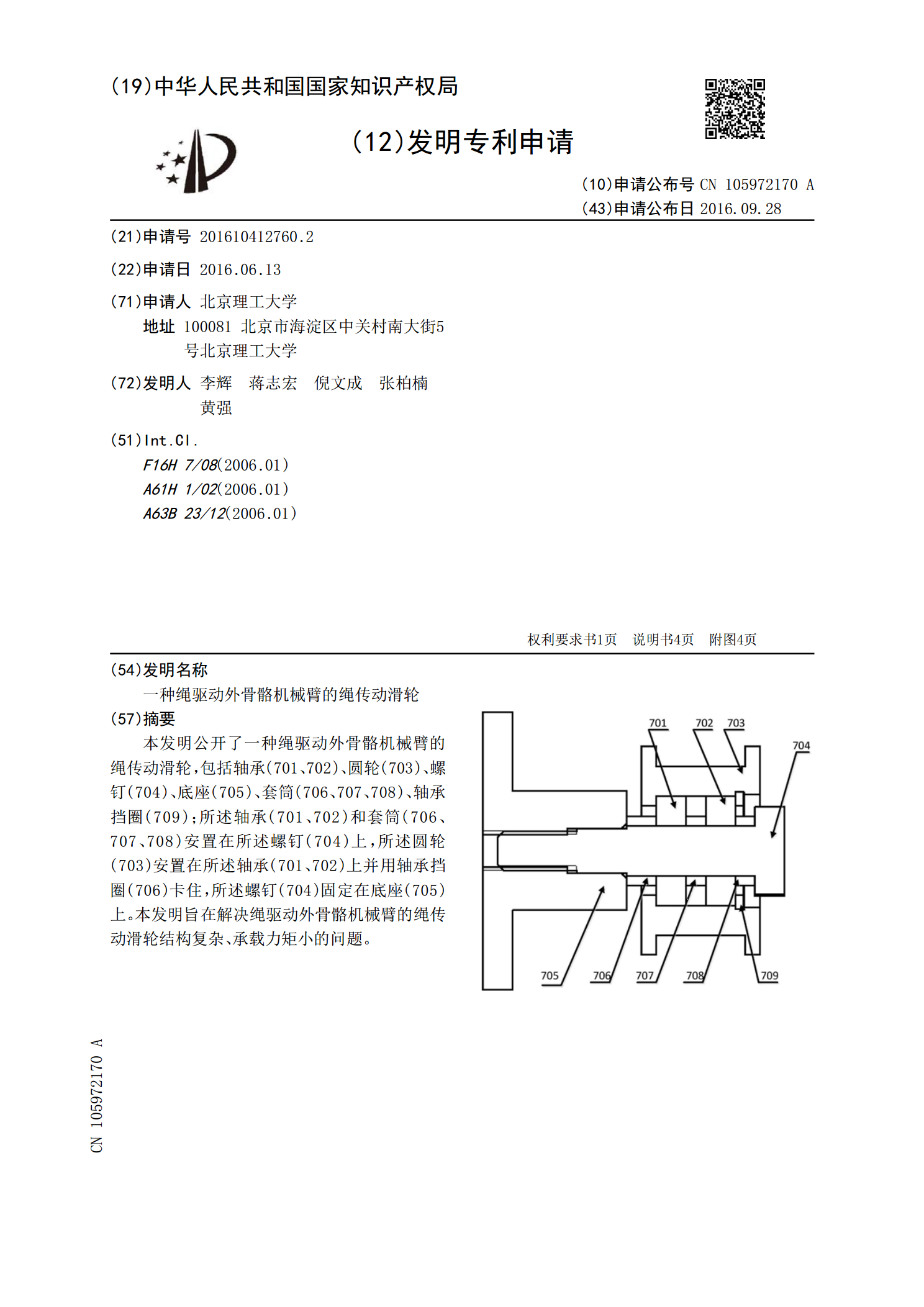
本发明公开了一种绳驱动外骨骼机械臂的绳传动滑轮,包括轴承(701、702)、圆轮(703)、螺钉(704)、底座(705)、套筒(706、707、708)、轴承挡圈(709);所述轴承(701、702)和套筒(706、707、708)安置在所述螺钉(704)上,所述圆轮(703)安置在所述轴承(701、702)上并用轴承挡圈(706)卡住,所述螺钉(704)固定在底座(705)上。本发明旨在解决绳驱动外骨骼机械臂的绳传动滑轮结构复杂、承载力矩小的问题。
基于差动绳传动的两自由度共线机械臂关节.pdf
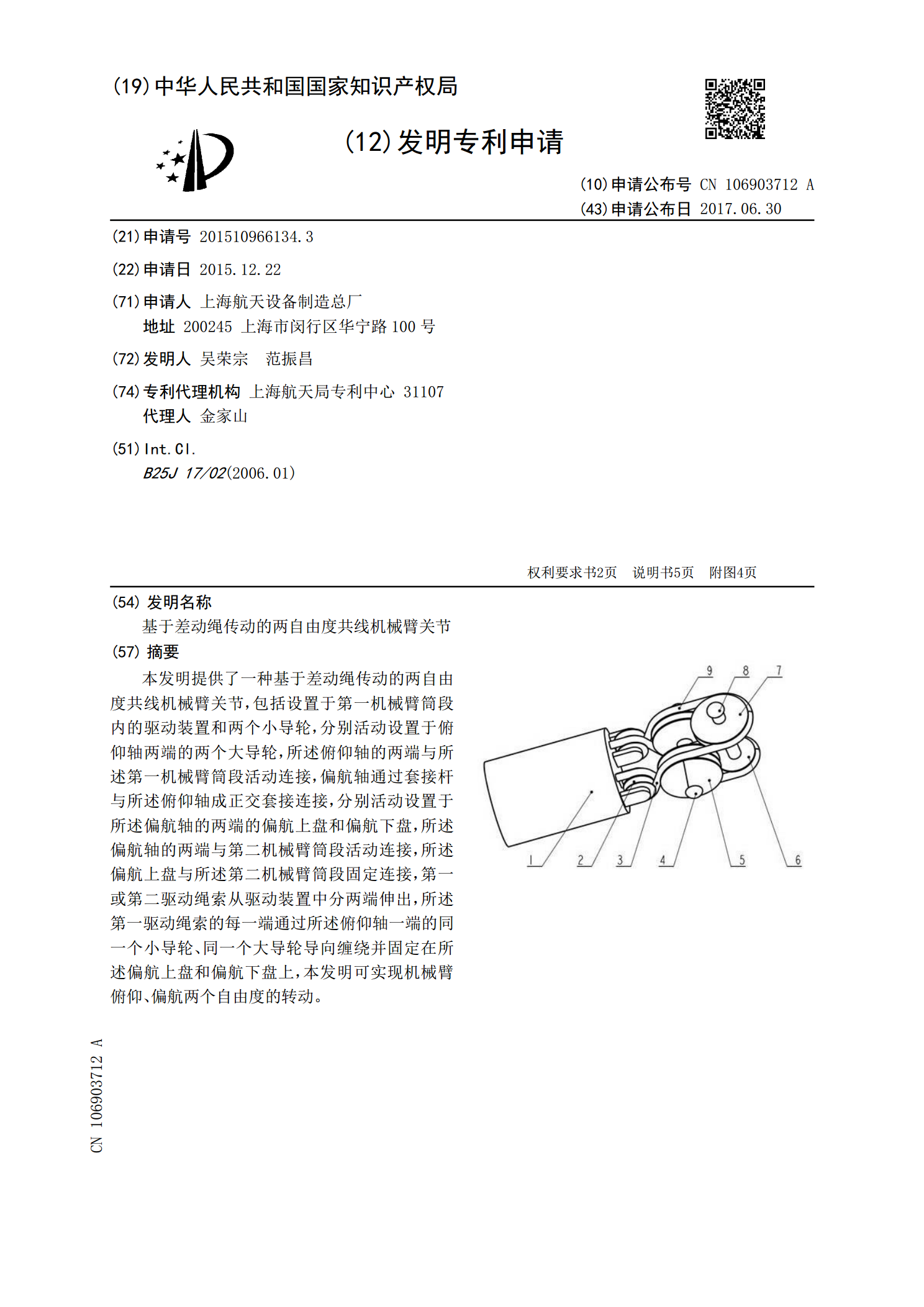
本发明提供了一种基于差动绳传动的两自由度共线机械臂关节,包括设置于第一机械臂筒段内的驱动装置和两个小导轮,分别活动设置于俯仰轴两端的两个大导轮,所述俯仰轴的两端与所述第一机械臂筒段活动连接,偏航轴通过套接杆与所述俯仰轴成正交套接连接,分别活动设置于所述偏航轴的两端的偏航上盘和偏航下盘,所述偏航轴的两端与第二机械臂筒段活动连接,所述偏航上盘与所述第二机械臂筒段固定连接,第一或第二驱动绳索从驱动装置中分两端伸出,所述第一驱动绳索的每一端通过所述俯仰轴一端的同一个小导轮、同一个大导轮导向缠绕并固定在所述偏航上盘

仿生机械臂摆动装置.pdf
本实用新型公开了一种仿生机械臂摆动装置,其包括依次连接的驱动电机、第一关节、第一臂、第二关节和第二臂。所述第一关节包括与所述驱动电机连接的第一连杆、用于固定所述第一连杆的第一拉杆钉、与所述第一臂固定的第二拉杆钉、以及分别连接所述第一拉杆钉和所述第二拉杆钉的拐头。所述第一臂包括手臂拉杆,所述手臂拉杆的两端分别设置第一鱼眼接头和第二鱼眼接头,所述第一鱼眼接头通过所述第一拉杆钉夹紧固定在所述拐头上,所述第二鱼眼接头通过所述第二拉杆钉夹紧固定在所述第二关节上。本实用新型提供的所述仿生机械臂摆动装置在关节拐角处能够