
可跨越直角壁面的磁吸附爬壁机器人.pdf

山柳****魔王

1/8
2/8
3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
可跨越直角壁面的磁吸附爬壁机器人.pdf
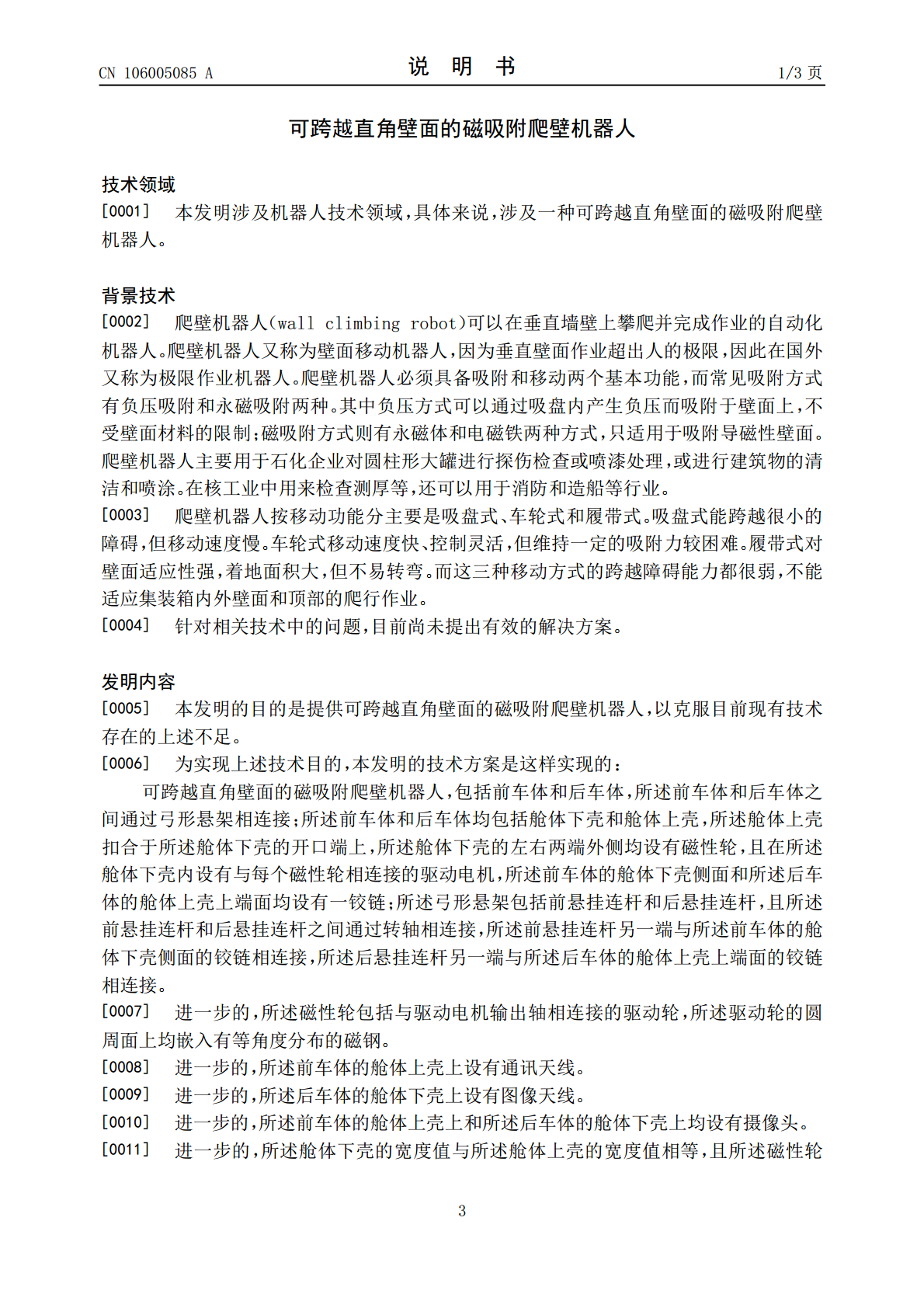
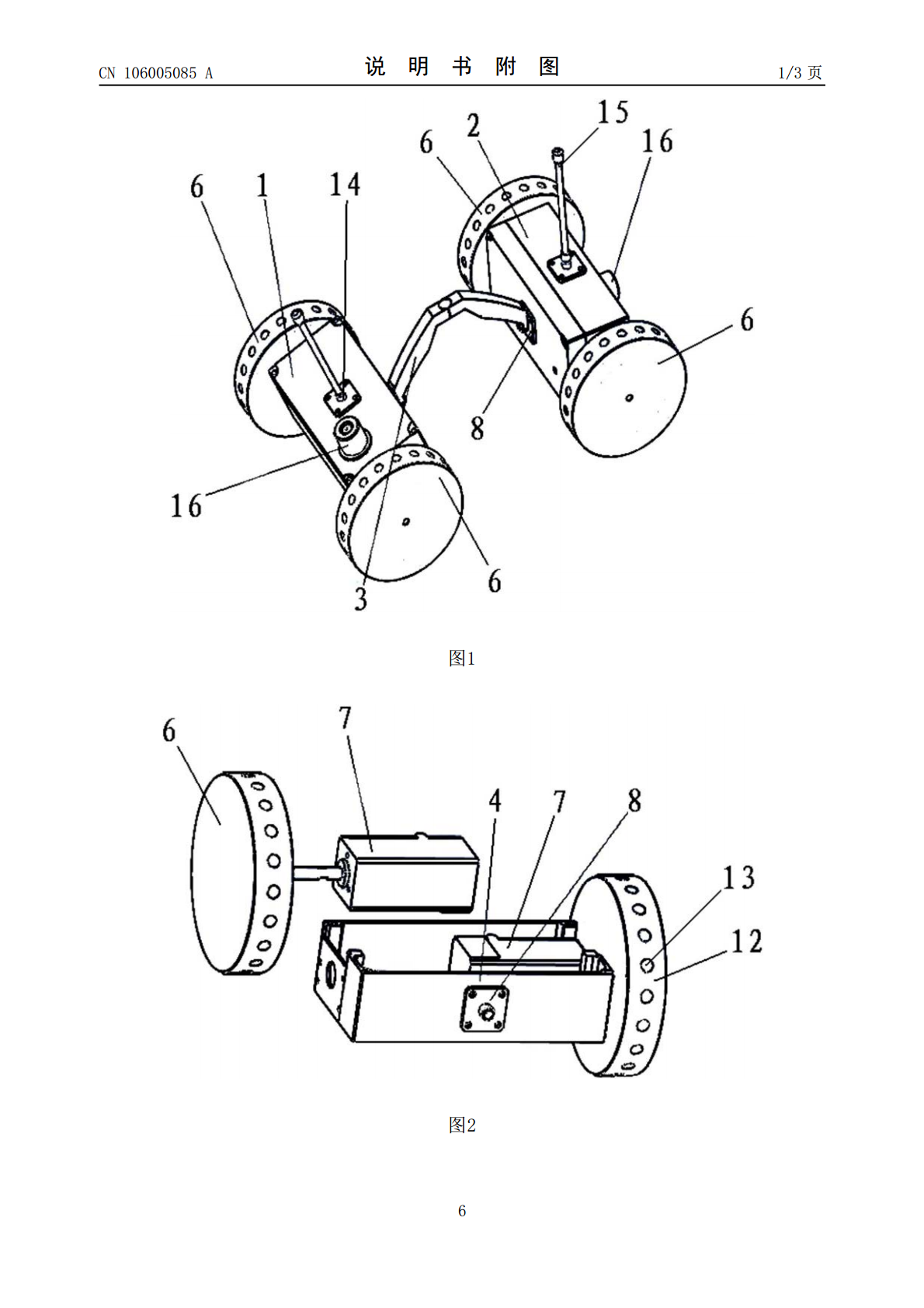
本发明公开了可跨越直角壁面的磁吸附爬壁机器人,包括前车体和后车体,前车体和后车体之间通过弓形悬架相连接;前车体和后车体均包括舱体下壳和舱体上壳,舱体下壳的左右两端均设有磁性轮,舱体下壳内设有与每个磁性轮相连接的驱动电机,前车体的舱体下壳侧面和后车体的舱体上壳上端面均设有铰链;弓形悬架包括前悬挂连杆和后悬挂连杆,前悬挂连杆和后悬挂连杆之间通过转轴相连接,前悬挂连杆与前车体的舱体下壳上的铰链相连接,后悬挂连杆与后车体的舱体上壳上的铰链相连接。本发明的有益效果:实现了轮式移动的磁吸附爬壁行走,可在垂直面、顶面自
磁吸附爬壁机器人.pdf
本发明公开了一种磁吸附爬壁机器人,用于提高磁吸附爬壁机器人的通用性和适应性,以适于各种工作需求,包括底架,所述底架上固定有前轴,所述前轴两端各安装一组可独立调速的驱动轮组件,所述驱动轮组件内设一号磁吸附单元,所述底架后部中间安装有导向轮组件,所述导向轮组件内设二号磁吸附单元;所述驱动轮组件设滚筒轮,与工作平面保持至少两个接触部。本发明具有较好的综合性能,通过左右驱动轮组件的速度差来实现转向,操作性强;驱动轮组件与导向轮组件内分别设有一号磁吸附单元与二号磁吸附单元,二者结合可保证良好的吸附性能;另外驱动轮组
用于复杂导磁壁面的定向吸附永磁磁轮双轮爬壁机器人.pdf
本发明公开用于复杂导磁壁面的定向吸附永磁磁轮双轮爬壁机器人,其包括机架和两个磁轮,机架上表面设有两个相互反向的驱动电机,每个驱动电机连接一个磁轮,驱动电机的输出轴上固定有第一齿轮,磁轮包括外轮、中间轴和扇形磁铁,外轮的圆心处固定有第二齿轮,第一齿轮与第二齿轮之间齿轮配合,第二齿轮的圆心与中间轴的一端转动连接,中间轴的另一端与机架对应端面上设有的机架孔间隙配合,扇形磁铁固定在机架对应一端的下表面,且扇形磁铁的半径小于外轮内孔半径。本发明当轮子接触到内相交壁面时,外轮不动内部扇形磁铁发生转动,实现内壁面的柔顺
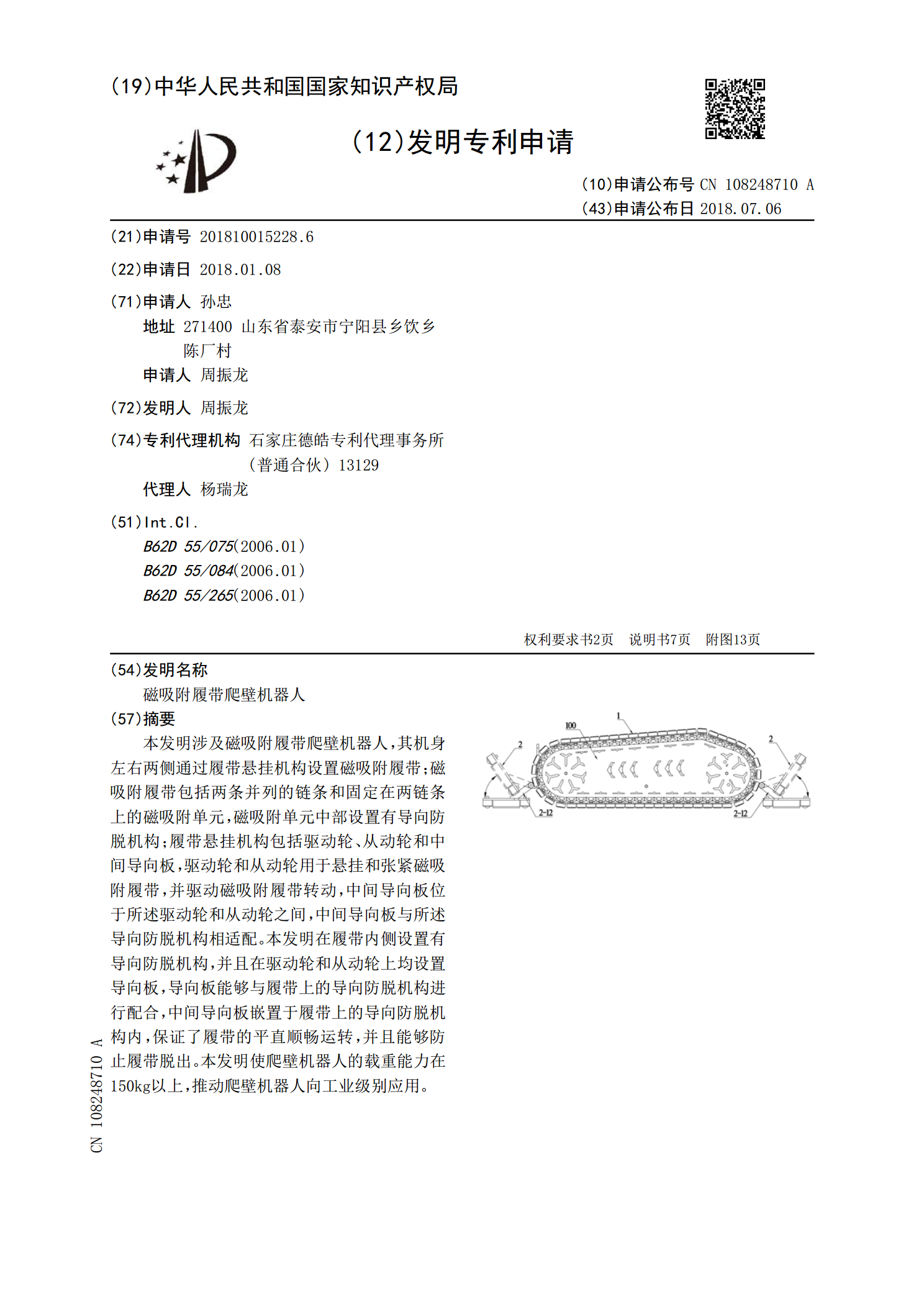
磁吸附履带爬壁机器人.pdf
本发明涉及磁吸附履带爬壁机器人,其机身左右两侧通过履带悬挂机构设置磁吸附履带;磁吸附履带包括两条并列的链条和固定在两链条上的磁吸附单元,磁吸附单元中部设置有导向防脱机构;履带悬挂机构包括驱动轮、从动轮和中间导向板,驱动轮和从动轮用于悬挂和张紧磁吸附履带,并驱动磁吸附履带转动,中间导向板位于所述驱动轮和从动轮之间,中间导向板与所述导向防脱机构相适配。本发明在履带内侧设置有导向防脱机构,并且在驱动轮和从动轮上均设置导向板,导向板能够与履带上的导向防脱机构进行配合,中间导向板嵌置于履带上的导向防脱机构内,保证了
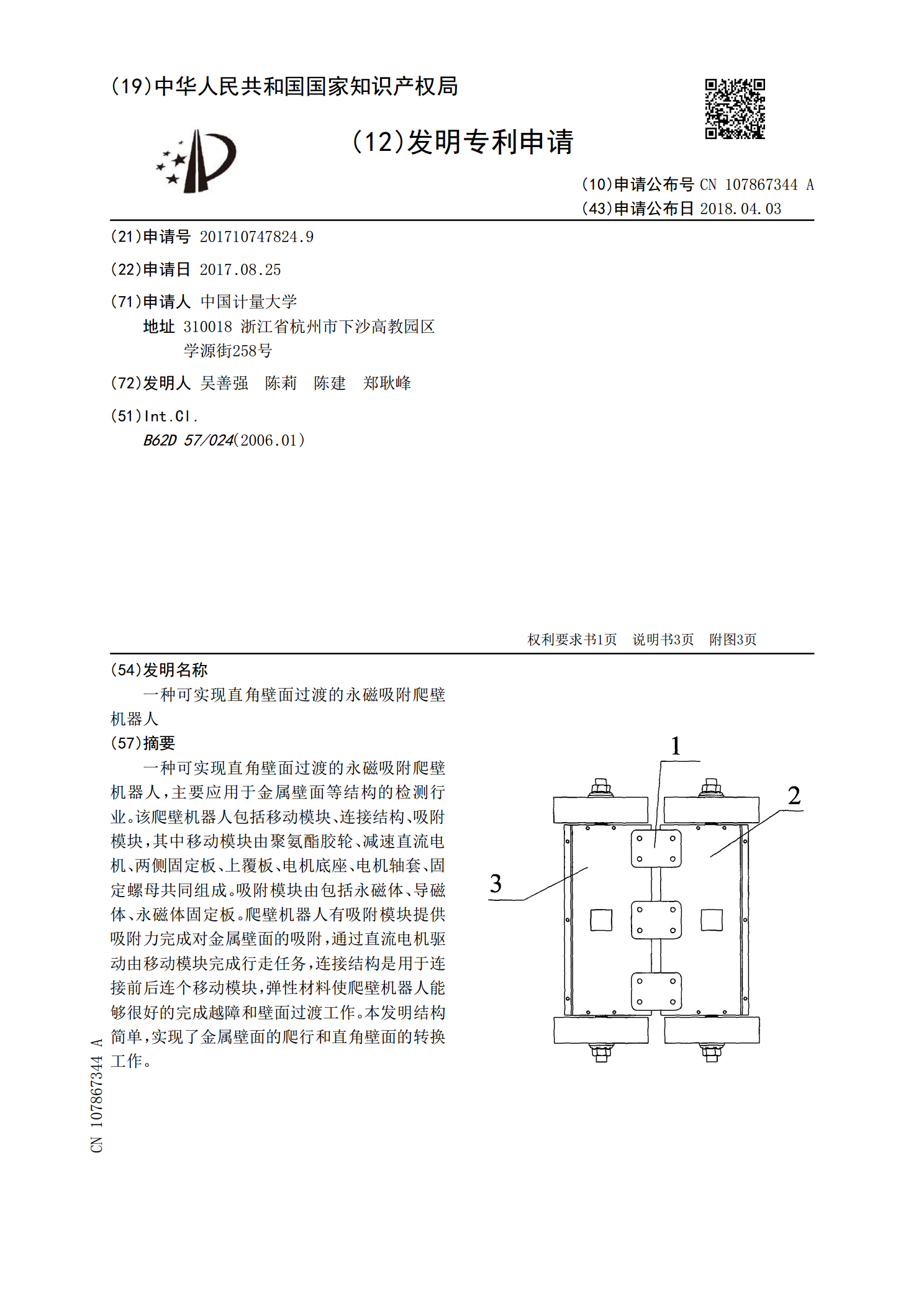
一种可实现直角壁面过渡的永磁吸附爬壁机器人.pdf
一种可实现直角壁面过渡的永磁吸附爬壁机器人,主要应用于金属壁面等结构的检测行业。该爬壁机器人包括移动模块、连接结构、吸附模块,其中移动模块由聚氨酯胶轮、减速直流电机、两侧固定板、上覆板、电机底座、电机轴套、固定螺母共同组成。吸附模块由包括永磁体、导磁体、永磁体固定板。爬壁机器人有吸附模块提供吸附力完成对金属壁面的吸附,通过直流电机驱动由移动模块完成行走任务,连接结构是用于连接前后连个移动模块,弹性材料使爬壁机器人能够很好的完成越障和壁面过渡工作。本发明结构简单,实现了金属壁面的爬行和直角壁面的转换工作。