
一种基于重力重心检测的四轮平衡车.pdf

St****12


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于重力重心检测的四轮平衡车.pdf
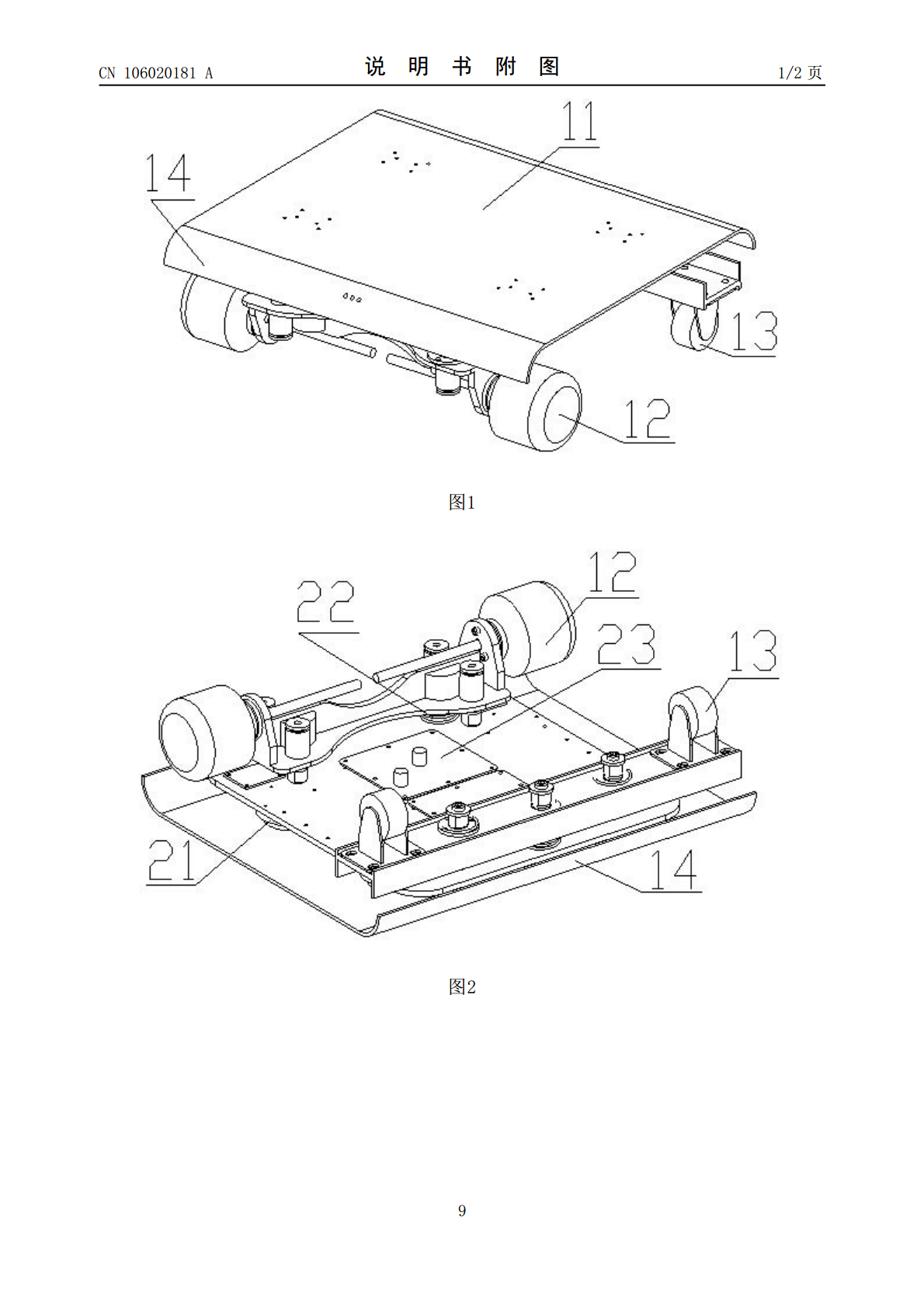
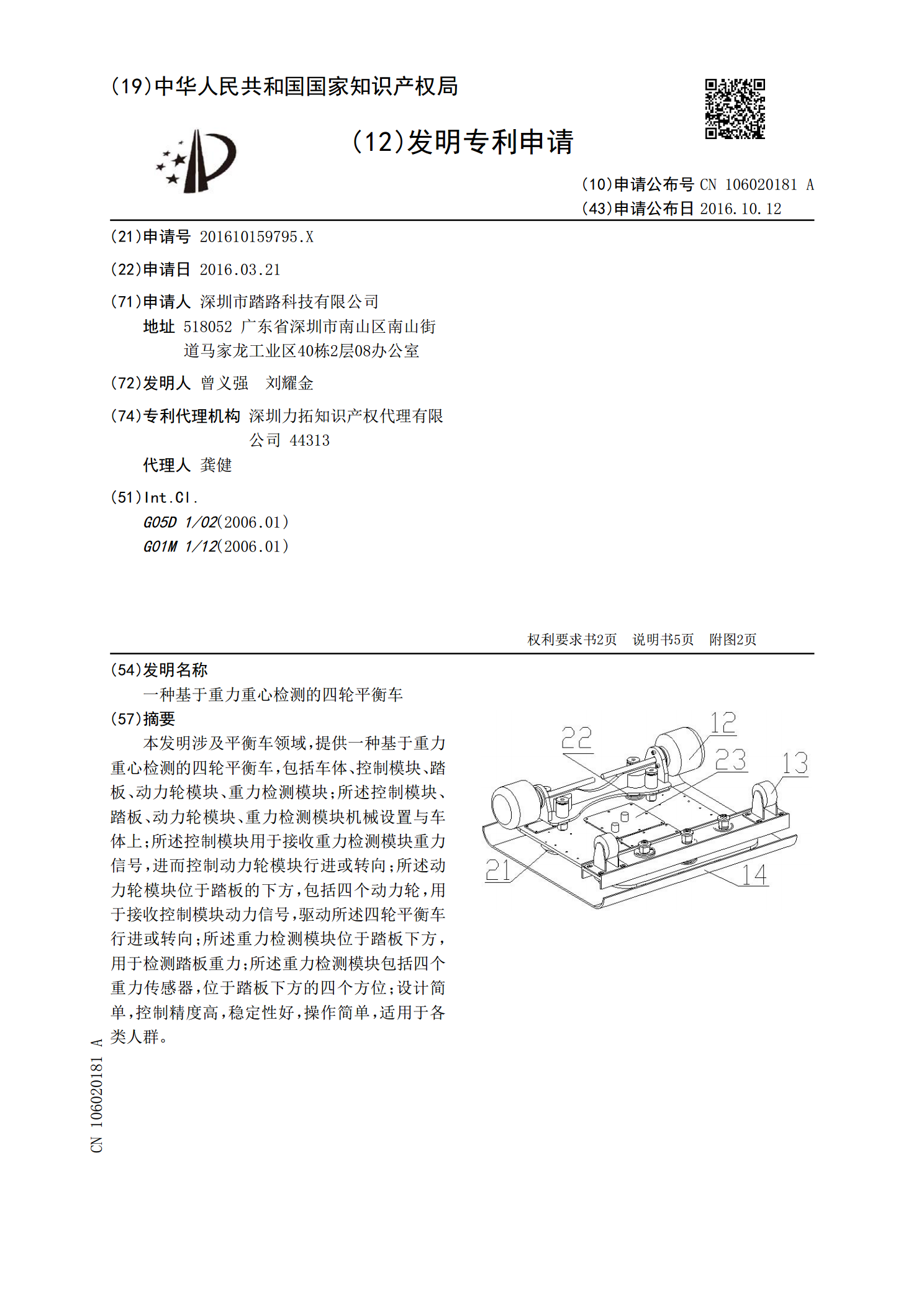
本发明涉及平衡车领域,提供一种基于重力重心检测的四轮平衡车,包括车体、控制模块、踏板、动力轮模块、重力检测模块;所述控制模块、踏板、动力轮模块、重力检测模块机械设置与车体上;所述控制模块用于接收重力检测模块重力信号,进而控制动力轮模块行进或转向;所述动力轮模块位于踏板的下方,包括四个动力轮,用于接收控制模块动力信号,驱动所述四轮平衡车行进或转向;所述重力检测模块位于踏板下方,用于检测踏板重力;所述重力检测模块包括四个重力传感器,位于踏板下方的四个方位;设计简单,控制精度高,稳定性好,操作简单,适用于各类人

悬挂式重力平衡重心可移动爬楼梯车.pdf
一种电动爬楼梯车,由三部分组成:1.由车架、前后轮、履带、履带防前扑装置、等件组成行走部分。2.由悬挂吊架、滑动套筒、蓄电池等件和人体自重组成重力平衡部分。3.由滑动座椅、滑动杠、连杆等件组成座椅移动部分。本发明的优点是:正面上下楼梯,悬挂吊架安装在车架的中心孔上,利用重力保持平衡。上下楼时利用爬楼梯的角度拉动车架上的偏心轴,偏心轴与连杆的一端连接,连杆的另一端拉动滑动杠上的座椅,使座椅在上楼时重心前移,下楼时重心后移来保证座椅的重心在车辆的中心。结构简单,成本低,可用遥控、程序进行控制,转弯半径小,可原

一种平衡车的重心调整方法.pdf
本发明提供了一种平衡车的重心调整方法,涉及平衡车领域,主要目的在于优化两轮平衡车在遥控时的运行状态,提高用户的使用体验。主要采用的技术方案为:平衡车设置有无线接收装置和可动态调整位置的配重块,配重块默认位于平衡车车轴正上方(重心中心点)的位置,在空载状态时,使用无线摇杆控制平衡车实现平衡车前后左右四个方向的移动,在平衡车需要前行或后退时,无线摇杆发出指令,控制系统操纵配重块移动至平衡车车体的最前端或最后端,平衡车的重心随之向前或向后移动,遵循保障车体实时平衡的原理,平衡车控制系统控制电机向前或向后运转保证

一种低重心平衡电瓶车.pdf
本发明公开了一种低重心平衡电瓶车,涉及交通工具技术领域,包括电瓶车本体,所述电瓶车本体包括车架和安装于车架上的前轮、后轮、车篮、把手、座椅、后座以及脚撑,所述车架中间底部安装有电池仓,所述电池仓内安装有用于供电的电池,还包括座椅保护组件,所述座椅保护组件包括座椅盖和用于驱动座椅盖转动的驱动机构,所述驱动机构包括连杆、拉杆、导向套和支杆,本申请通过将电池仓置于车身的黄金比例点,低重心几何设计,优秀的低重心车架几何,前后配比更平衡,保障行使过程中车身更稳;设有座椅盖及驱动机构,设有座椅保护组件,在不骑行时达到

一种高位拣选车的重心自主平衡装置.pdf
本发明公开了一种高位拣选车的重心自主平衡装置,包括可动配重机构和控制系统。可动配重机构由配重机构底座、纵向运动机构、横向运动机构和配重装置组成;控制系统由多个压力传感器和控制器组成;控制器包含有配重移动控制单元和车辆行驶状态控制单元。本发明通过压力传感器来检测车辆各车轮的载荷信号并将载荷信号传输给控制器,当各车轮的载荷比值超过设定的标准时,控制器即启动步进电机对车辆的配重箱进行相应的移动;在配重箱达到极限位置后仍不能满足车辆整体重心平衡的要求时,控制器会对车辆的速度、加速度、转向角进行调整,以保证车辆运行