
一种高位拣选车的重心自主平衡装置.pdf

书錦****by


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种高位拣选车的重心自主平衡装置.pdf
本发明公开了一种高位拣选车的重心自主平衡装置,包括可动配重机构和控制系统。可动配重机构由配重机构底座、纵向运动机构、横向运动机构和配重装置组成;控制系统由多个压力传感器和控制器组成;控制器包含有配重移动控制单元和车辆行驶状态控制单元。本发明通过压力传感器来检测车辆各车轮的载荷信号并将载荷信号传输给控制器,当各车轮的载荷比值超过设定的标准时,控制器即启动步进电机对车辆的配重箱进行相应的移动;在配重箱达到极限位置后仍不能满足车辆整体重心平衡的要求时,控制器会对车辆的速度、加速度、转向角进行调整,以保证车辆运行
一种仓库发货拣选车.pdf
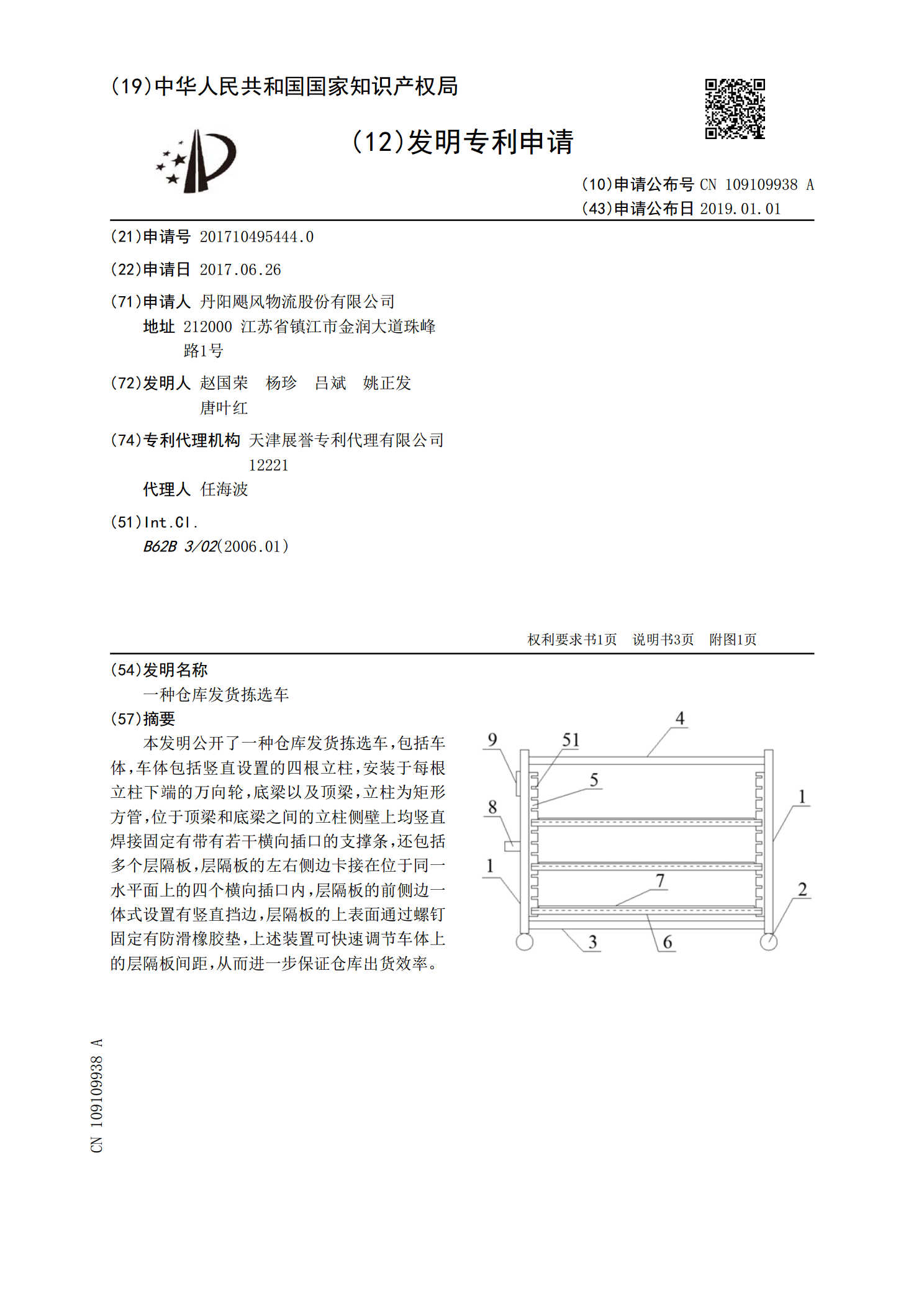
本发明公开了一种仓库发货拣选车,包括车体,车体包括竖直设置的四根立柱,安装于每根立柱下端的万向轮,底梁以及顶梁,立柱为矩形方管,位于顶梁和底梁之间的立柱侧壁上均竖直焊接固定有带有若干横向插口的支撑条,还包括多个层隔板,层隔板的左右侧边卡接在位于同一水平面上的四个横向插口内,层隔板的前侧边一体式设置有竖直挡边,层隔板的上表面通过螺钉固定有防滑橡胶垫,上述装置可快速调节车体上的层隔板间距,从而进一步保证仓库出货效率。

一种具有重心平衡装置的角度调节平板.pdf
本发明公开一种具有重心平衡装置的角度调节平板,在底座内设置配重块,当支撑架相对于底座底部进行张开转动时,支撑架通过牵引部带动配重块克服恢复部的回复力向第一方向移动;支撑架相对于底座底部进行闭合转动时,恢复部的回复力带动配重块向与第一方向相反的第二方向移动,从而让平板在调整角度的过程中,利用配重块对整个平板电脑的重心适应性地进行调整,避免了平板电脑的重心偏移的情况出现,提高了使用平板电脑时的安全性。
一种仓库货物拣选车的车架.pdf
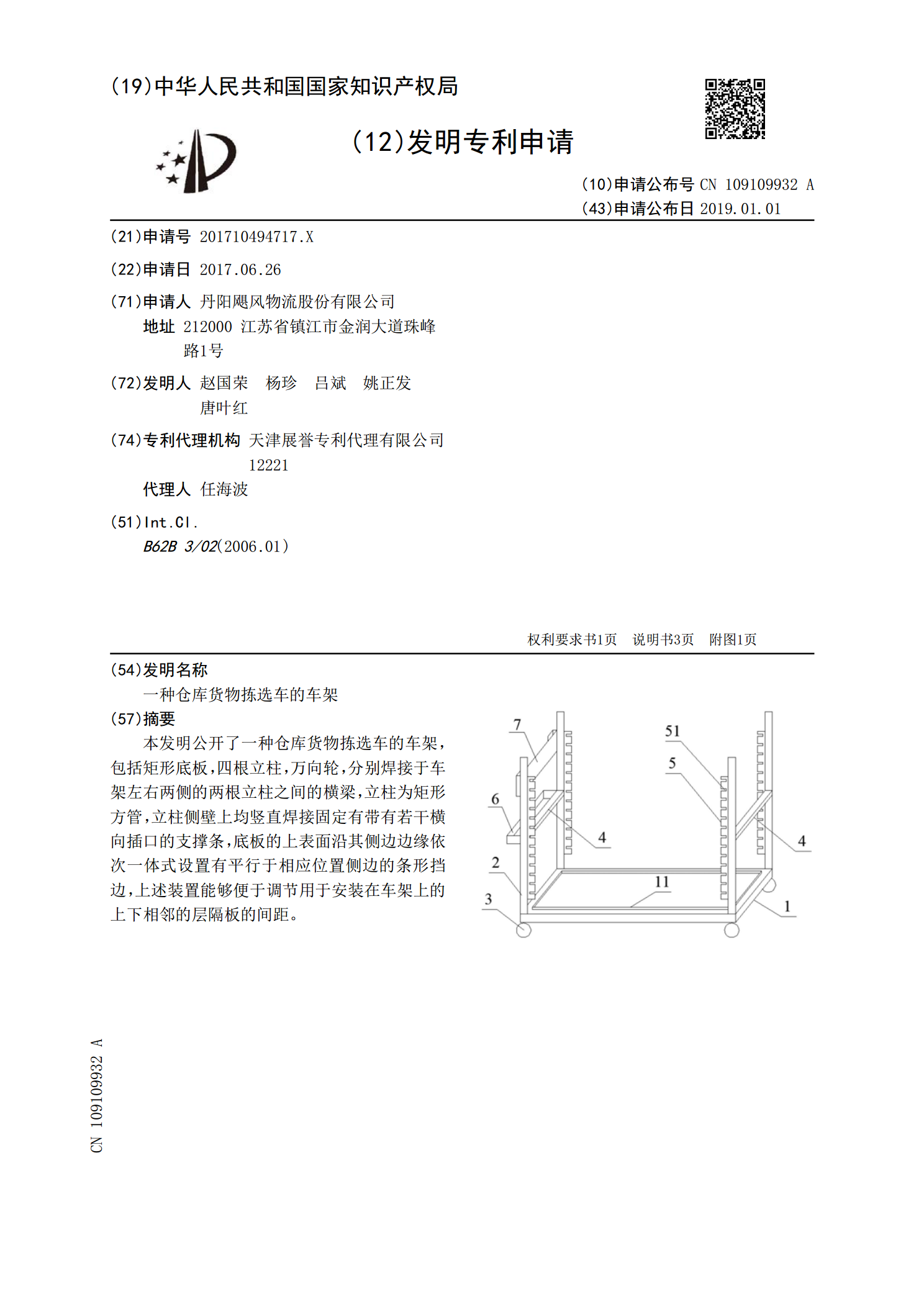
本发明公开了一种仓库货物拣选车的车架,包括矩形底板,四根立柱,万向轮,分别焊接于车架左右两侧的两根立柱之间的横梁,立柱为矩形方管,立柱侧壁上均竖直焊接固定有带有若干横向插口的支撑条,底板的上表面沿其侧边边缘依次一体式设置有平行于相应位置侧边的条形挡边,上述装置能够便于调节用于安装在车架上的上下相邻的层隔板的间距。

电动拣选车.pdf
本发明涉及电动拣选车,尤其涉及一种具有载人搬运结构的电动拣选车。电动拣选车,包括车架(1)、门架(2)和载货架(3),车架(1)包括车头(101)和车尾(102),定义从车头(101)至车尾(102)为从前端至后端的方向,载货架(3)位于车架(1)的中间,载货架(3)的底部位于车头(101)和车尾(102)之间;车架(1)后端固定连接有门架(2),门架(2)前端固定连接有载货架(3);车架(1)的前端和后端均设有滚轮(14)。按照本发明的技术方案,本发明能解决整车配重要求,降低车辆形式空间要求。