
传动装置及机器人手臂装置.pdf

山柳****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共71页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

传动装置及机器人手臂装置.pdf
【目的】为了精确地检测旋转角度且也为了更加安全地驱动。【解决方法】本发明提供了一种传动装置(300),该传动装置(300)包括:减速齿轮(320),该减速齿轮(320)通过一定减速比降低接合至电机(360)的旋转轴的输入轴的旋转速度,并将降低的旋转速度发送给输出轴(350);第一绝对角度编码器(330),该第一绝对角度编码器(330)检测输入轴的旋转角度;和第二绝对角度编码器(340),该第二绝对角度编码器(340)检测输出轴的旋转角度。

一种机器人手臂限位传动装置.pdf
本发明公开了一种机器人手臂限位传动装置,包括机架,所述机架的顶部和底部均安装有限位板,所述机架的一侧安装有连接架,所述连接架的侧面均设有圆孔,所述机架的内部安装有半销齿轮,所述半销齿轮一侧的边缘位置焊接有多个呈排列分布的齿销,所述半销齿轮的一侧焊接有连接柱,所述连接柱的顶部和底部均焊接有弹簧,且所述弹簧之间呈对称分布,所述连接柱的一侧安装有电机,本发明通过设置连接柱、限位板、半销齿轮和弹簧,解决了传动装置在对机器人的臂杆进行传动处理时,没有减震处理,导致机器人手臂运动过程中,夹持物件不平稳,容易导致物件掉

输电线路自动巡检机器人伸缩手臂传动装置.pdf
本发明设计一种输电线路自动巡检机器人伸缩手臂传动装置。该装置由手臂伸缩机构、手臂旋转机构和支架机构组成。手臂伸缩机构由内、外丝杠螺母传动机构、内外升降筒、升降电机和升降齿轮等组成,手臂旋转机构由转臂电机、蜗轮蜗杆机构和转臂箱组成。支架机构主要由转臂支架、转臂箱和转臂箱箱盖组成。该装置采用类似伸缩天线的内外升降筒组成的伸缩机构,使手臂的有效伸长长度升至单臂有效伸长长度的两倍,而手臂整体的长度尺寸却没有变化,从而在达到相同的伸长范围下,采用伸缩手臂的机器人可使整个机构的尺寸大大紧缩。

齿轮传动装置及具有该齿轮传动装置的机械手臂.pdf
一种齿轮传动装置,包括传动机构及装设于传动机构上的齿轮间隙调整机构,传动机构包括相互啮合的第一调节齿轮和第二调节齿轮,齿轮间隙调整机构包括支撑板及调整件,支撑板开设有限位孔,调整件包括一个凸缘,凸缘收容于限位孔中,靠近该第二调节齿轮的该凸缘的边缘至该第一调节齿轮的旋转轴的最大距离大于远离该第二调节齿轮的一端至该第一调节齿轮的旋转轴的最小距离,调整件旋转时,调整件能够带动第一调节齿轮的旋转轴朝向第二调节齿轮旋转线运动。本发明还提供一种利用该齿轮传动装置的机械手臂。齿轮传动装置由于旋转调整件调整传动机构中第一
齿轮传动装置及具有该齿轮传动装置的机械手臂.pdf
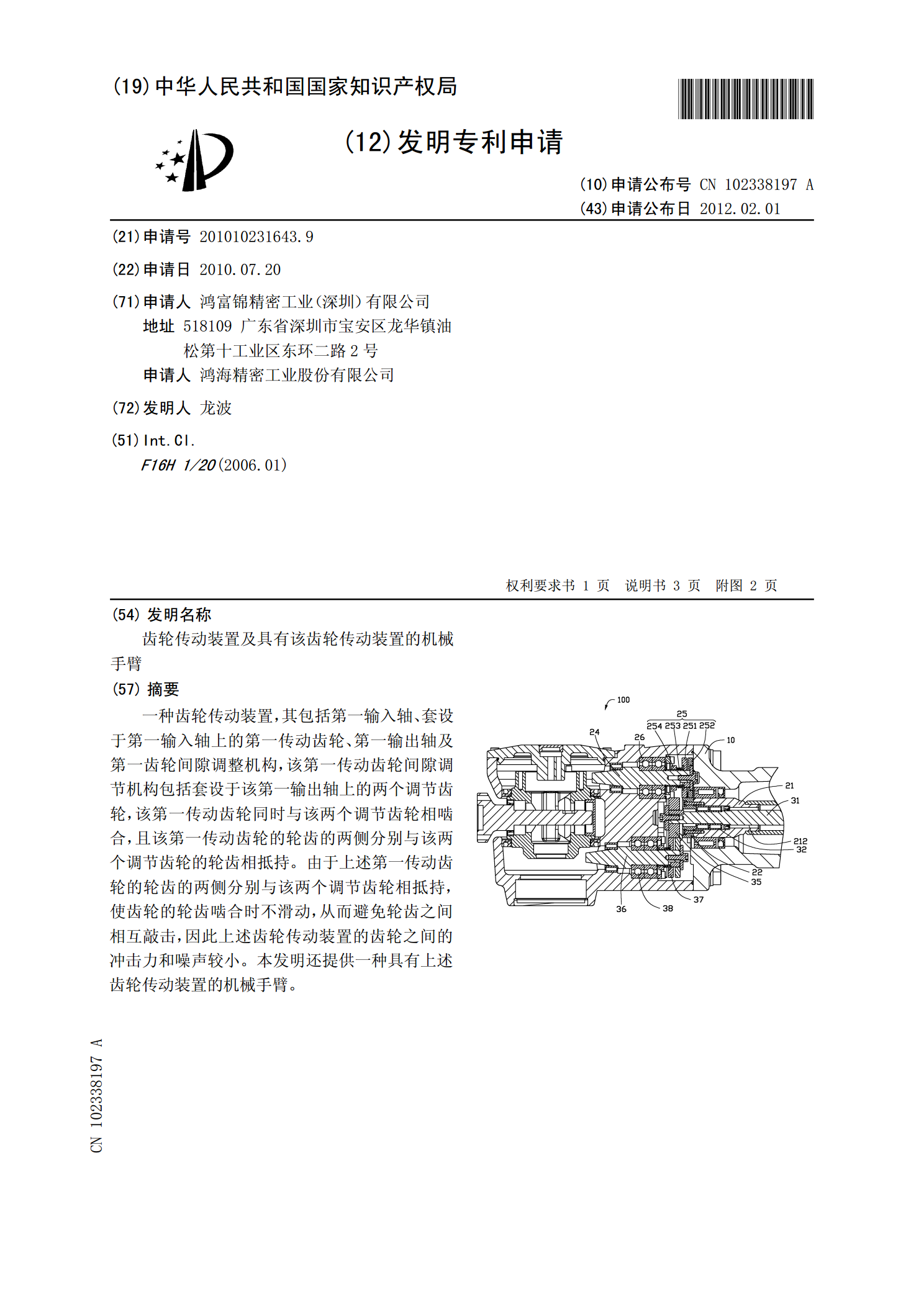
一种齿轮传动装置,其包括第一输入轴、套设于第一输入轴上的第一传动齿轮、第一输出轴及第一齿轮间隙调整机构,该第一传动齿轮间隙调节机构包括套设于该第一输出轴上的两个调节齿轮,该第一传动齿轮同时与该两个调节齿轮相啮合,且该第一传动齿轮的轮齿的两侧分别与该两个调节齿轮的轮齿相抵持。由于上述第一传动齿轮的轮齿的两侧分别与该两个调节齿轮相抵持,使齿轮的轮齿啮合时不滑动,从而避免轮齿之间相互敲击,因此上述齿轮传动装置的齿轮之间的冲击力和噪声较小。本发明还提供一种具有上述齿轮传动装置的机械手臂。