
一种多履带式全向移动平台.pdf

英哲****公主

1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多履带式全向移动平台.pdf
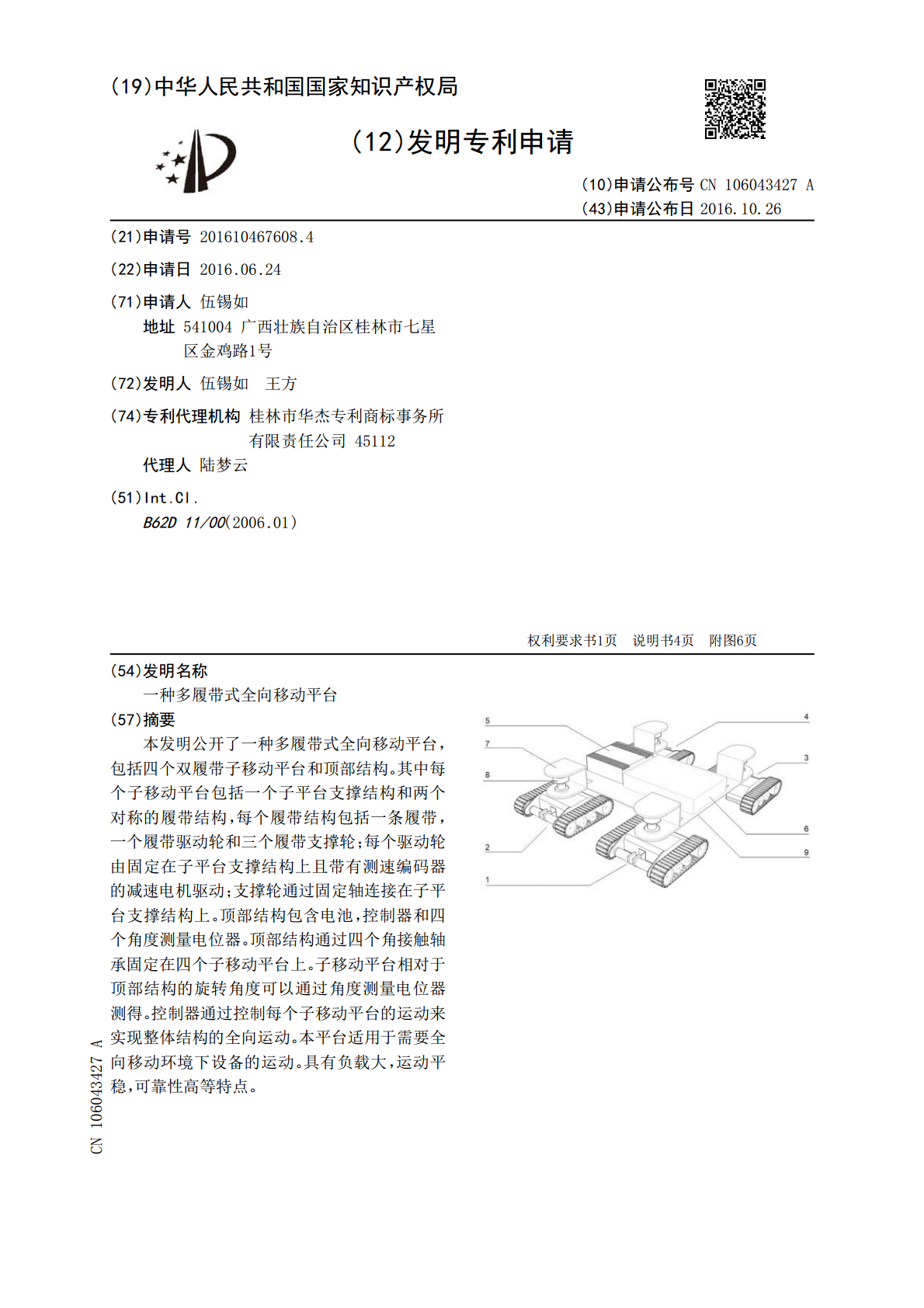
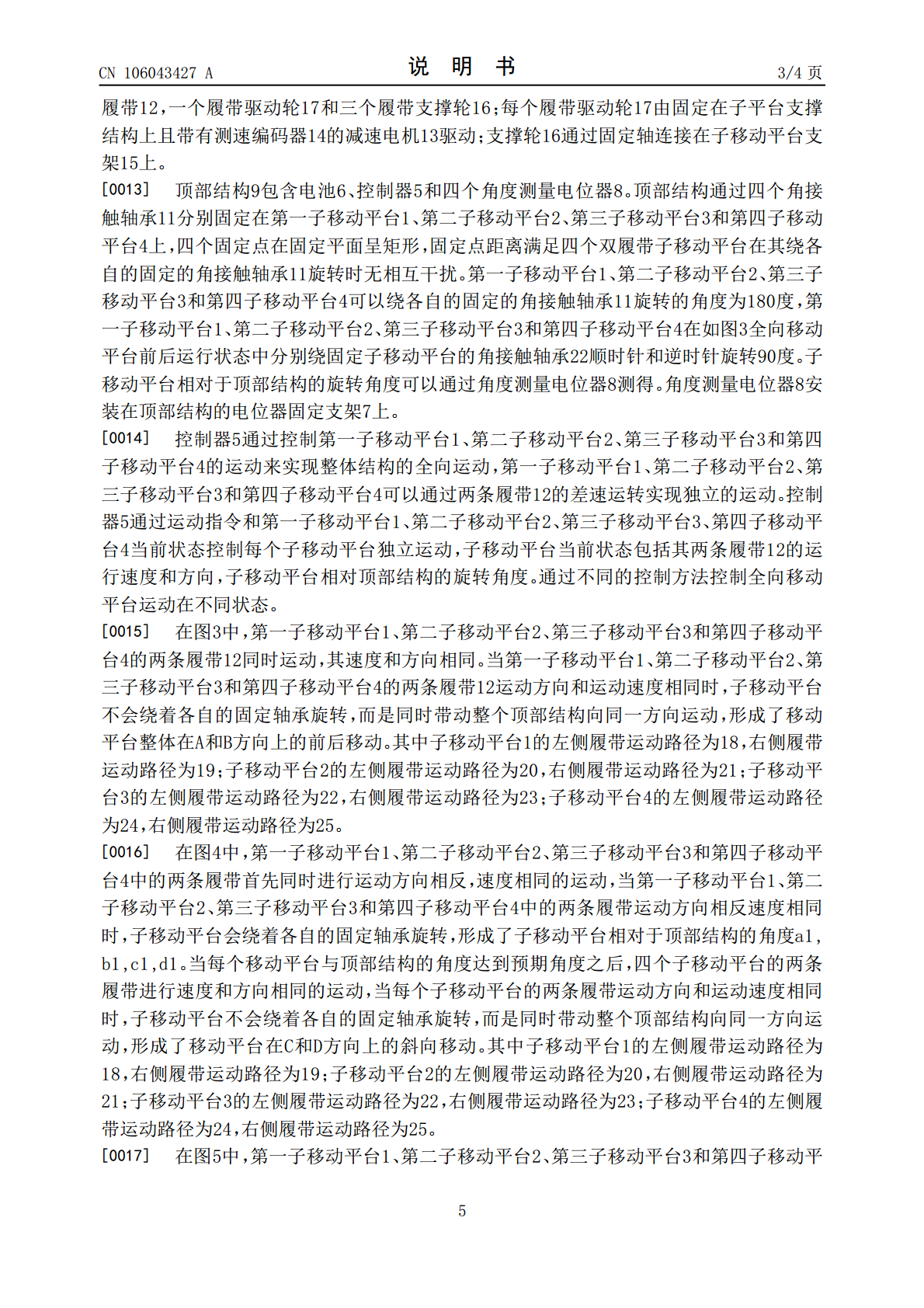
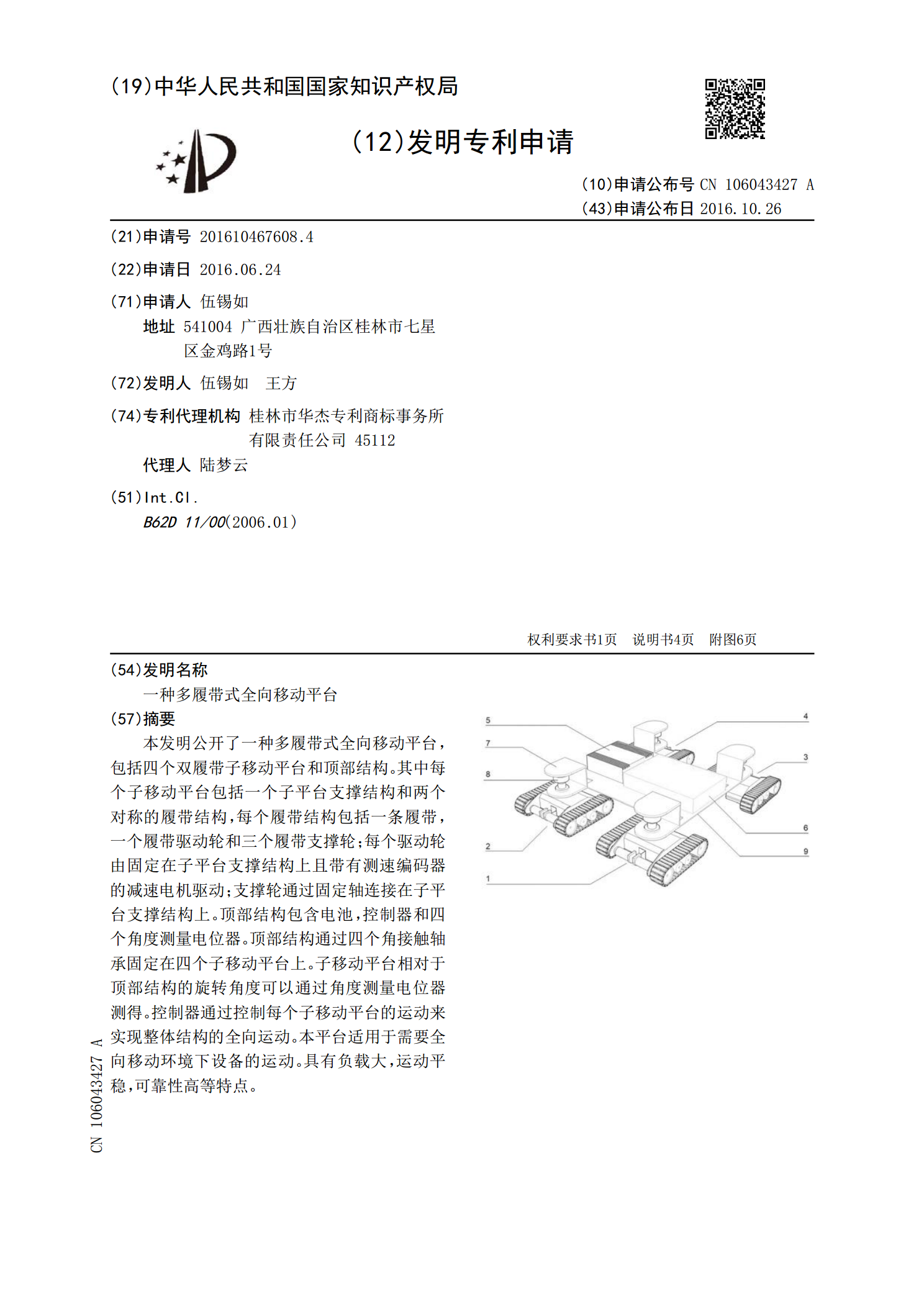
本发明公开了一种多履带式全向移动平台,包括四个双履带子移动平台和顶部结构。其中每个子移动平台包括一个子平台支撑结构和两个对称的履带结构,每个履带结构包括一条履带,一个履带驱动轮和三个履带支撑轮;每个驱动轮由固定在子平台支撑结构上且带有测速编码器的减速电机驱动;支撑轮通过固定轴连接在子平台支撑结构上。顶部结构包含电池,控制器和四个角度测量电位器。顶部结构通过四个角接触轴承固定在四个子移动平台上。子移动平台相对于顶部结构的旋转角度可以通过角度测量电位器测得。控制器通过控制每个子移动平台的运动来实现整体结构的全
一种全向移动平台.pdf
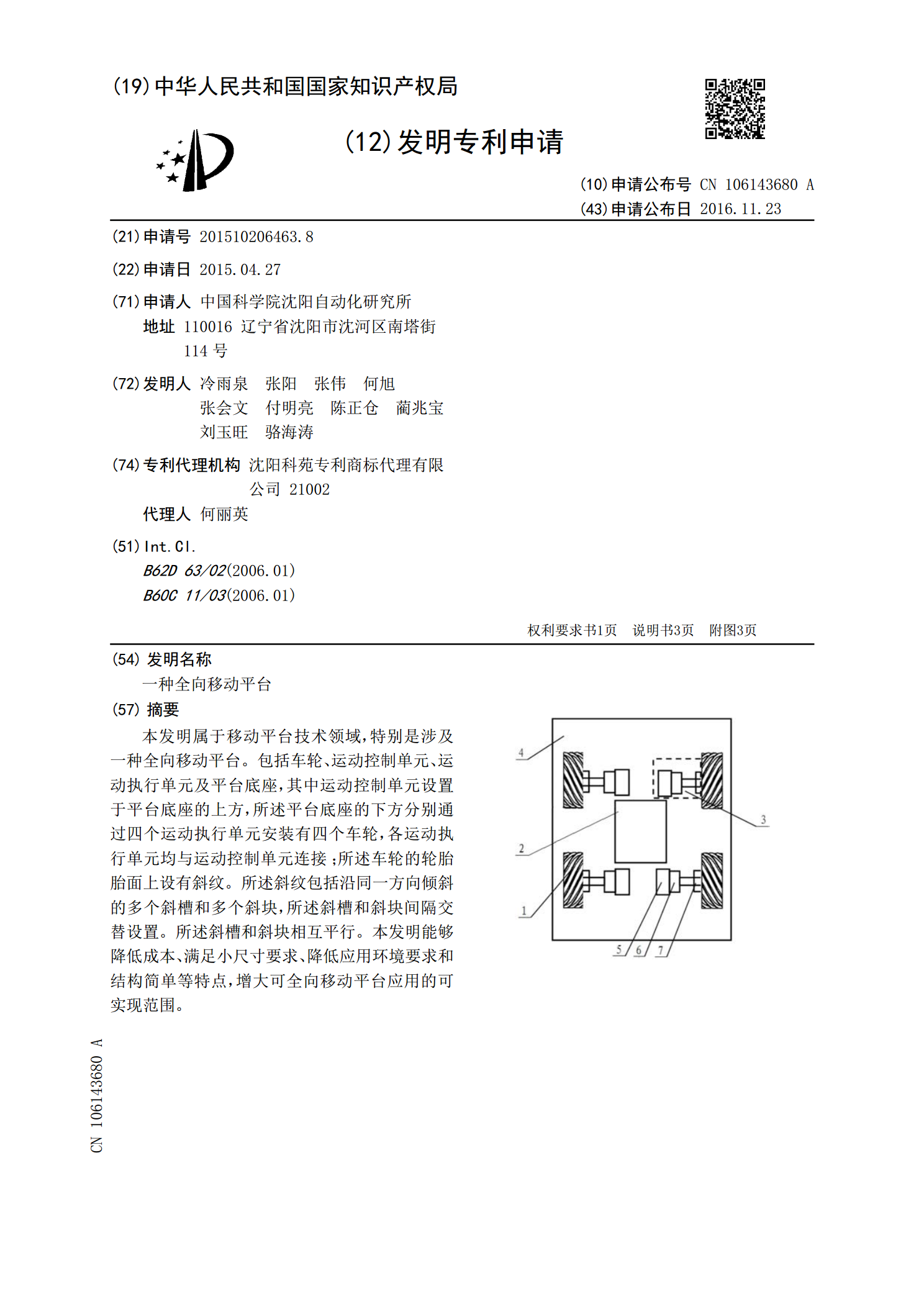
本发明属于移动平台技术领域,特别是涉及一种全向移动平台。包括车轮、运动控制单元、运动执行单元及平台底座,其中运动控制单元设置于平台底座的上方,所述平台底座的下方分别通过四个运动执行单元安装有四个车轮,各运动执行单元均与运动控制单元连接;所述车轮的轮胎胎面上设有斜纹。所述斜纹包括沿同一方向倾斜的多个斜槽和多个斜块,所述斜槽和斜块间隔交替设置。所述斜槽和斜块相互平行。本发明能够降低成本、满足小尺寸要求、降低应用环境要求和结构简单等特点,增大可全向移动平台应用的可实现范围。

一种全向移动平台.pdf
本发明公布了一种全向移动平台,包括台架本体,台架本体呈长方体,在所述台架本体上安装有四个永磁同步电机,永磁同步电机的输出轴连接有减速器,减速器上连接有全向移动轮,每个全向移动轮的转动轴均通过支撑轴承座固定在台架本体上,在所述台架本体上还安装有电池组,电池组与永磁同步电机连接,在所述台架本体上还安装有电机控制器。本发明通过控制每台永磁同步电机的旋转方向和转速,可以实现平面内的任意移动轨迹,具有很高的灵活性,位置可达性较好,使用场合不受限制,可以在空间狭小、复杂的环境下使用,工作空间要求大大降低,基本可以满足
一种全向移动平台.pdf
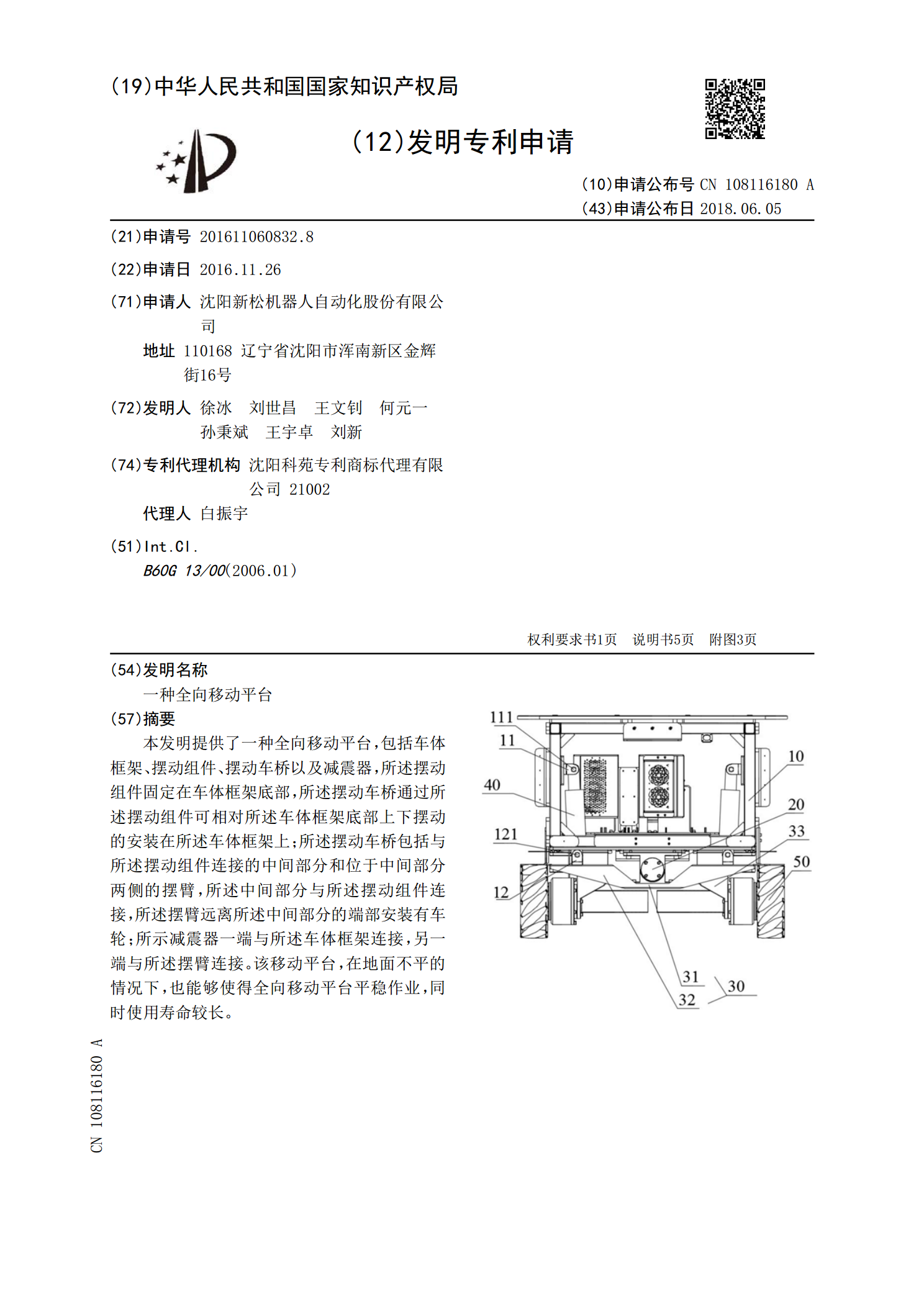
本发明提供了一种全向移动平台,包括车体框架、摆动组件、摆动车桥以及减震器,所述摆动组件固定在车体框架底部,所述摆动车桥通过所述摆动组件可相对所述车体框架底部上下摆动的安装在所述车体框架上;所述摆动车桥包括与所述摆动组件连接的中间部分和位于中间部分两侧的摆臂,所述中间部分与所述摆动组件连接,所述摆臂远离所述中间部分的端部安装有车轮;所示减震器一端与所述车体框架连接,另一端与所述摆臂连接。该移动平台,在地面不平的情况下,也能够使得全向移动平台平稳作业,同时使用寿命较长。
一种全向移动平台及全向移动机器人.pdf
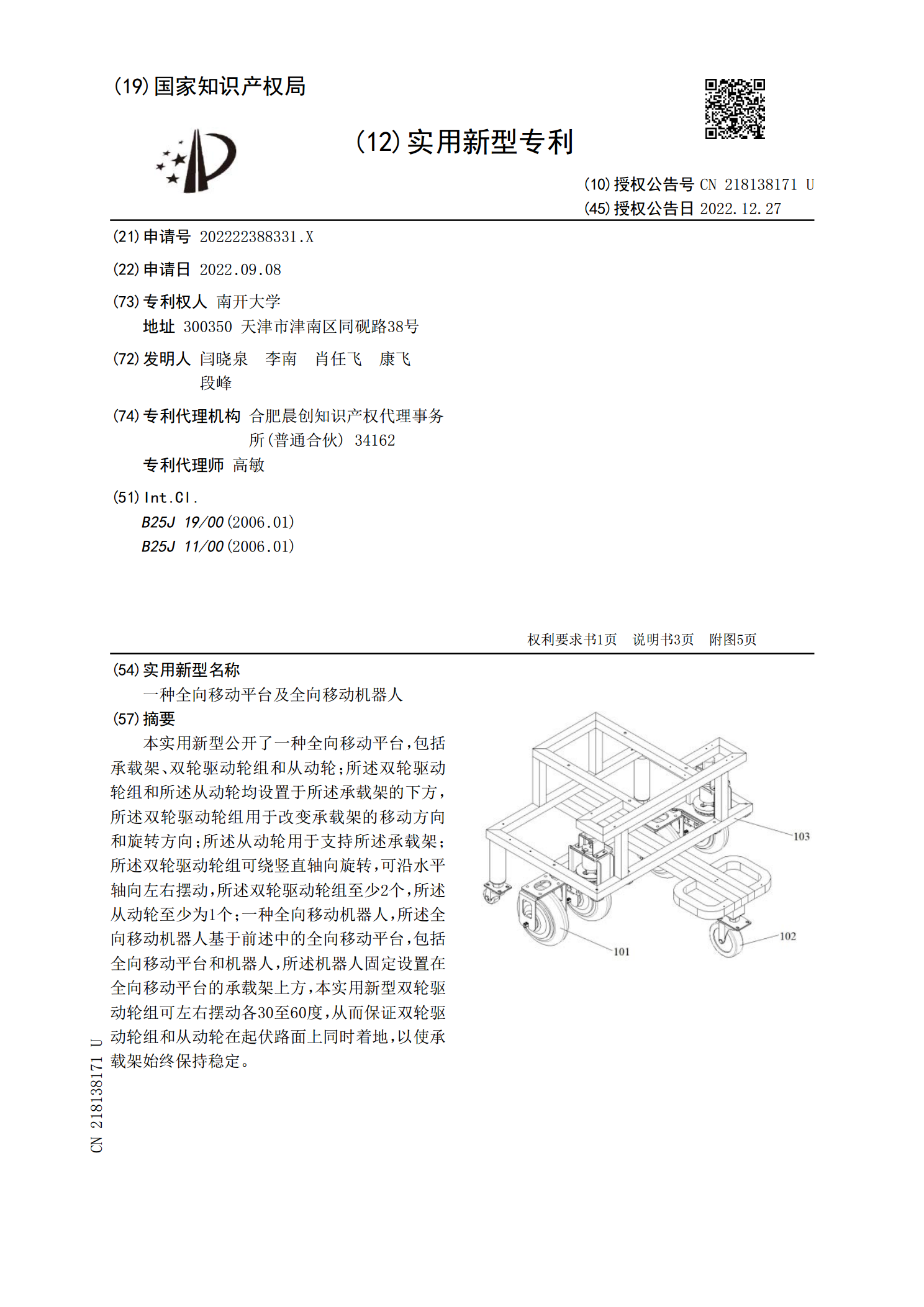
本实用新型公开了一种全向移动平台,包括承载架、双轮驱动轮组和从动轮;所述双轮驱动轮组和所述从动轮均设置于所述承载架的下方,所述双轮驱动轮组用于改变承载架的移动方向和旋转方向;所述从动轮用于支持所述承载架;所述双轮驱动轮组可绕竖直轴向旋转,可沿水平轴向左右摆动,所述双轮驱动轮组至少2个,所述从动轮至少为1个;一种全向移动机器人,所述全向移动机器人基于前述中的全向移动平台,包括全向移动平台和机器人,所述机器人固定设置在全向移动平台的承载架上方,本实用新型双轮驱动轮组可左右摆动各30至60度,从而保证双轮驱动轮