
一种基于并联机构的管道内壁打磨机器人.pdf

秀华****魔王


1/8
2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于并联机构的管道内壁打磨机器人.pdf
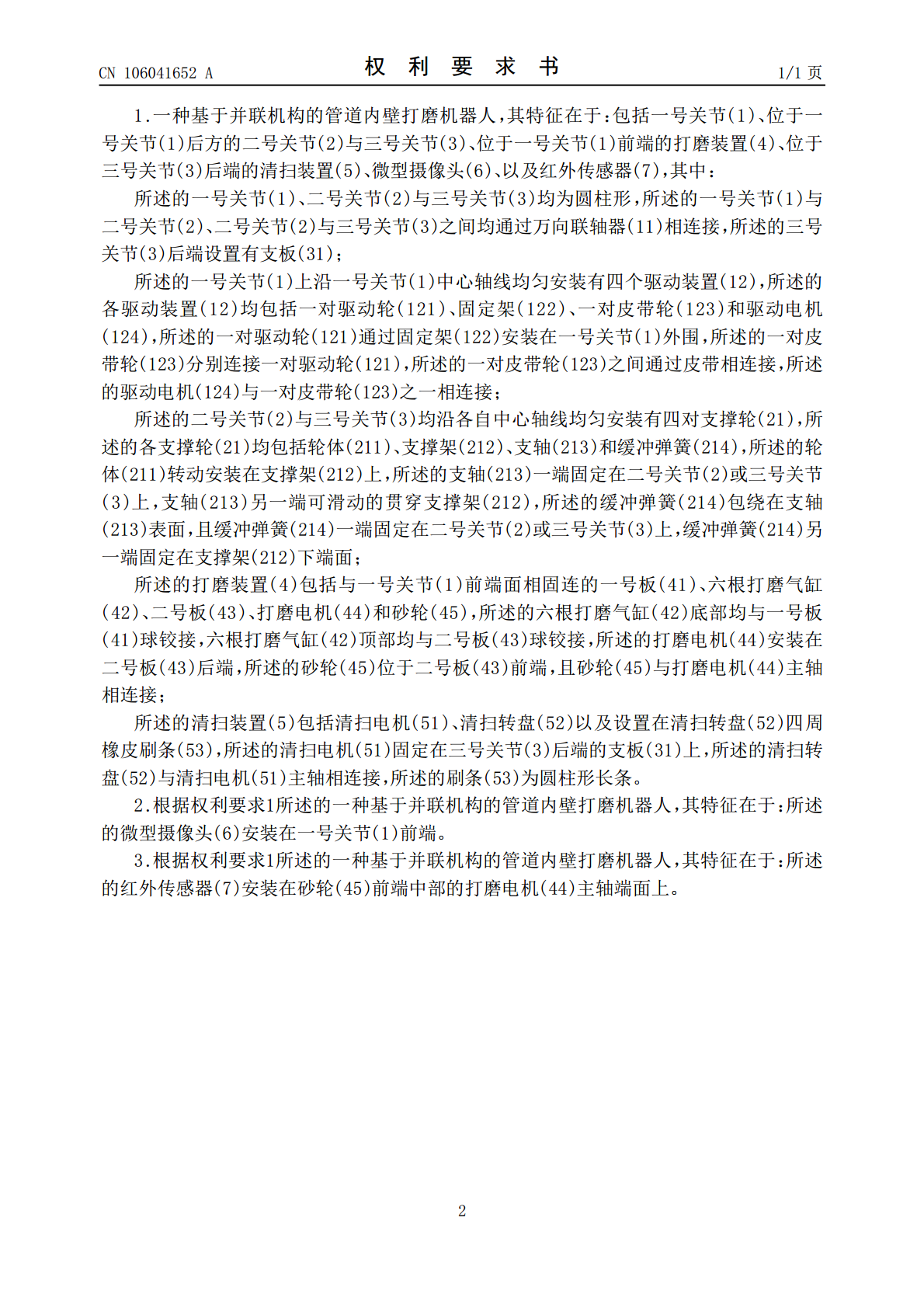
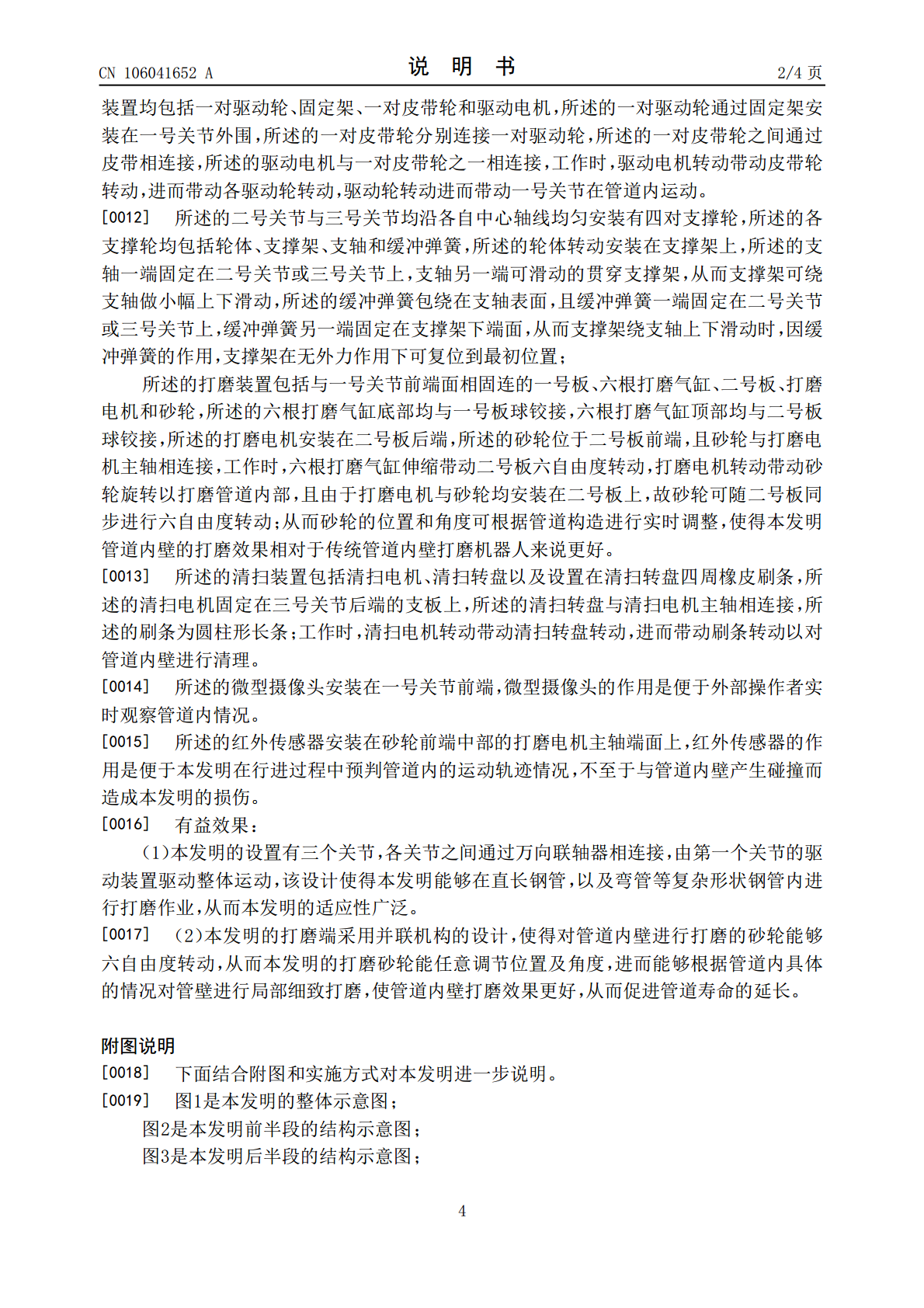
本发明涉及管道打磨机器人领域,具体的说是一种基于并联机构的管道内壁打磨机器人,包括一号关节、位于一号关节后方的二号关节与三号关节、位于一号关节前端的打磨装置、位于三号关节后端的清扫装置、微型摄像头、以及红外传感器;所述的一号关节与二号关节、二号关节与三号关节之间均通过万向联轴器相连接;所述的打磨装置包括一号板、六根打磨气缸、二号板、打磨电机和砂轮;所述的清扫装置包括清扫电机、清扫转盘和橡皮刷条。本发明能够在直长钢管,以及弯管等复杂形状钢管内进行打磨作业,且本发明的打磨砂轮能任意调节位置及角度,进而能够根据

一种长管道内壁打磨设备.pdf
本发明公开了一种长管道内壁打磨设备,包括箱体,所述箱体内部设有控制仓,所述控制仓顶部设有吸尘仓以及底部设有吸尘控制仓,所述吸尘控制仓底部设有驱动仓,所述控制仓内部设有双轴电机,所述双轴电机两端设有转动轴,所述转动轴延伸至箱体外侧,所述转动轴一端顶部和底部均设有电动伸缩杆,所述电动伸缩杆顶端设有打磨机构,所述吸尘控制仓内部设有吸尘器,所述吸尘器两侧设有第一引风仓,所述第一引风仓对应的箱体外侧设有进风嘴。本发明双轴电机通过转动轴带动两侧的四个电动伸缩杆和打磨机构转动,打磨机构能够将管道内壁旋转打磨,并且四轮驱

管道内壁打磨装置.pdf
本发明涉及一种管道内壁打磨装置,属于管道内壁打磨作业装置技术领域。本发明包括机身和磨具,机身上设置有主电机和行走电机,主电机与磨具驱动连接;行走电机通过传动机构与滑杆驱动连接,机身上设置有与滑杆相适配的轴套或导轨,传动机构使得滑杆沿水平向作往复运动,滑杆远离传动机构的一端固定连接有驱动机架,驱动机架通过第一连接杆连接有驱动轮,驱动轮沿机身圆周方向布置;机身通过第二连接杆连接有行走轮,行走轮沿机身圆周方向布置;驱动轮和行走轮均为单向转动轮、并且行走方向同向设置。本发明不需要额外的行走牵引装置及其他机台辅助装

一种锅炉内壁打磨机构.pdf
本发明公开一种锅炉内壁打磨机构,包括安装在调节盘的两相对侧的两个可伸缩调节的扇形打磨部,所述调节盘包括上盘与下盘,所述上盘与下盘之间形成打磨部安装槽,所述上盘与下盘之间形成有齿轮腔内安装有调节齿轮,所述调节齿轮分别与两个相对的齿板啮合连接,每个所述齿板的一端与一个扇形打磨部固定连接,所述扇形打磨部连接导向杆,所述导向杆的一端安装在上盘与下盘形成的导向孔中,所述齿板的一端安装在上盘与下盘形成的齿板孔中。本发明通过以上技术方案,使得打磨机构的打磨部,可以根据需要调节其与产品内壁间的距离,方便在磨损后根据需要调
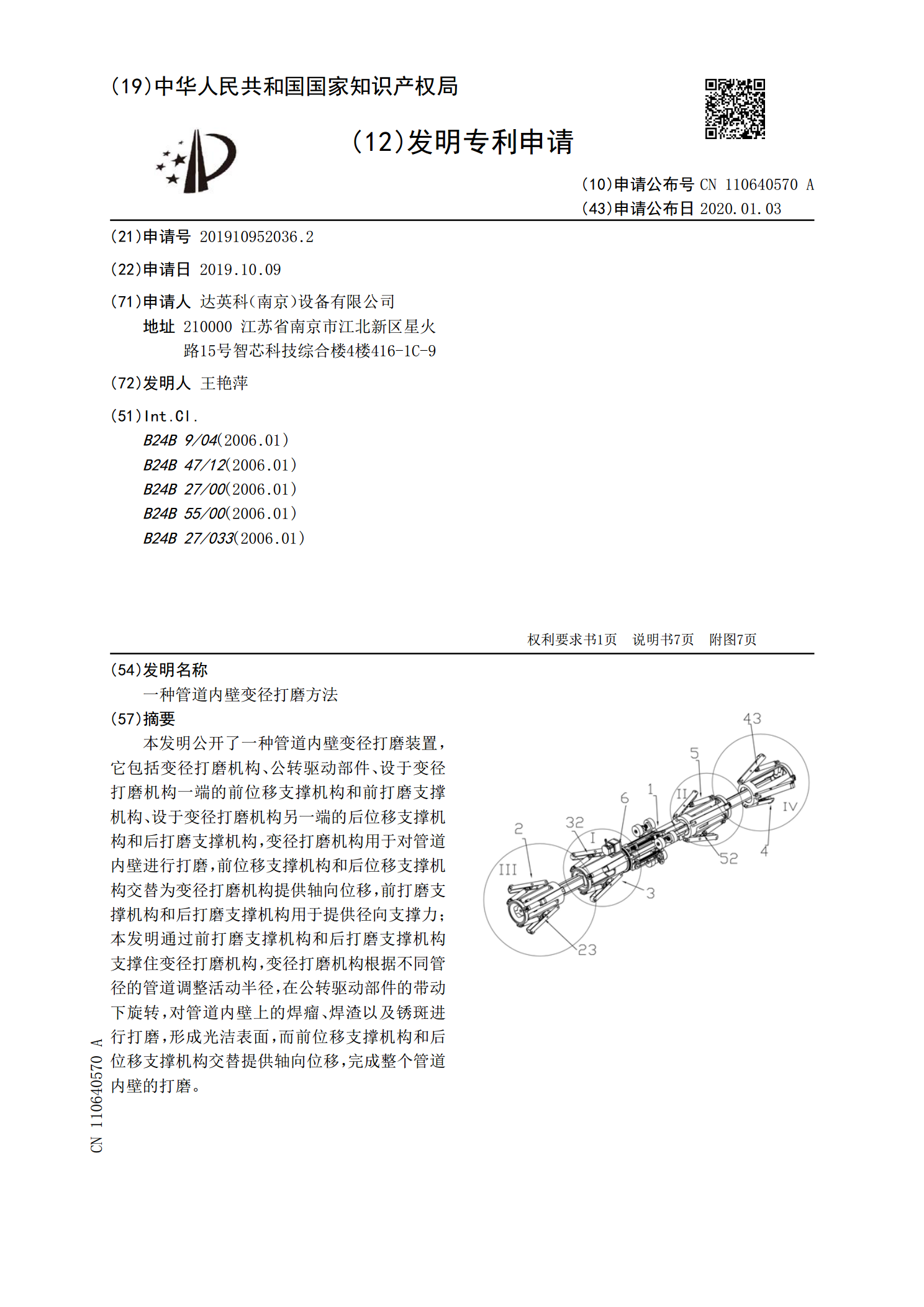
一种管道内壁变径打磨方法.pdf
本发明公开了一种管道内壁变径打磨装置,它包括变径打磨机构、公转驱动部件、设于变径打磨机构一端的前位移支撑机构和前打磨支撑机构、设于变径打磨机构另一端的后位移支撑机构和后打磨支撑机构,变径打磨机构用于对管道内壁进行打磨,前位移支撑机构和后位移支撑机构交替为变径打磨机构提供轴向位移,前打磨支撑机构和后打磨支撑机构用于提供径向支撑力;本发明通过前打磨支撑机构和后打磨支撑机构支撑住变径打磨机构,变径打磨机构根据不同管径的管道调整活动半径,在公转驱动部件的带动下旋转,对管道内壁上的焊瘤、焊渣以及锈斑进行打磨,形成光