
基于超声测控的电动爬楼轮椅控制系统及方法.pdf

书生****萌哒

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于超声测控的电动爬楼轮椅控制系统及方法.pdf
本发明提供了一种基于超声测控的电动爬楼轮椅控制方法系统,适用于轮椅技术领域,包括:超声避障模块,用于通过超声波检测障碍物和/或楼梯到电动爬楼轮椅的第一距离,避开所述障碍物;霍尔控制模块,用于根据霍尔控制器当前输入的控制指令,控制所述电动爬楼轮椅的电机的运作;第一电机驱动模块,用于根据所述控制指令驱动所述电动爬楼轮椅的轮子电机运行;第二电机驱动模块,用于根据所述控制指令驱动所述电动爬楼轮椅的履带电机运行。同时,本发明还提供一种基于超声测控的电动爬楼轮椅控制方法。借此,本发明实现了电动爬楼轮椅自动化智能化,实
基于重心测控的电动轮椅的爬楼方法及其电动轮椅.pdf
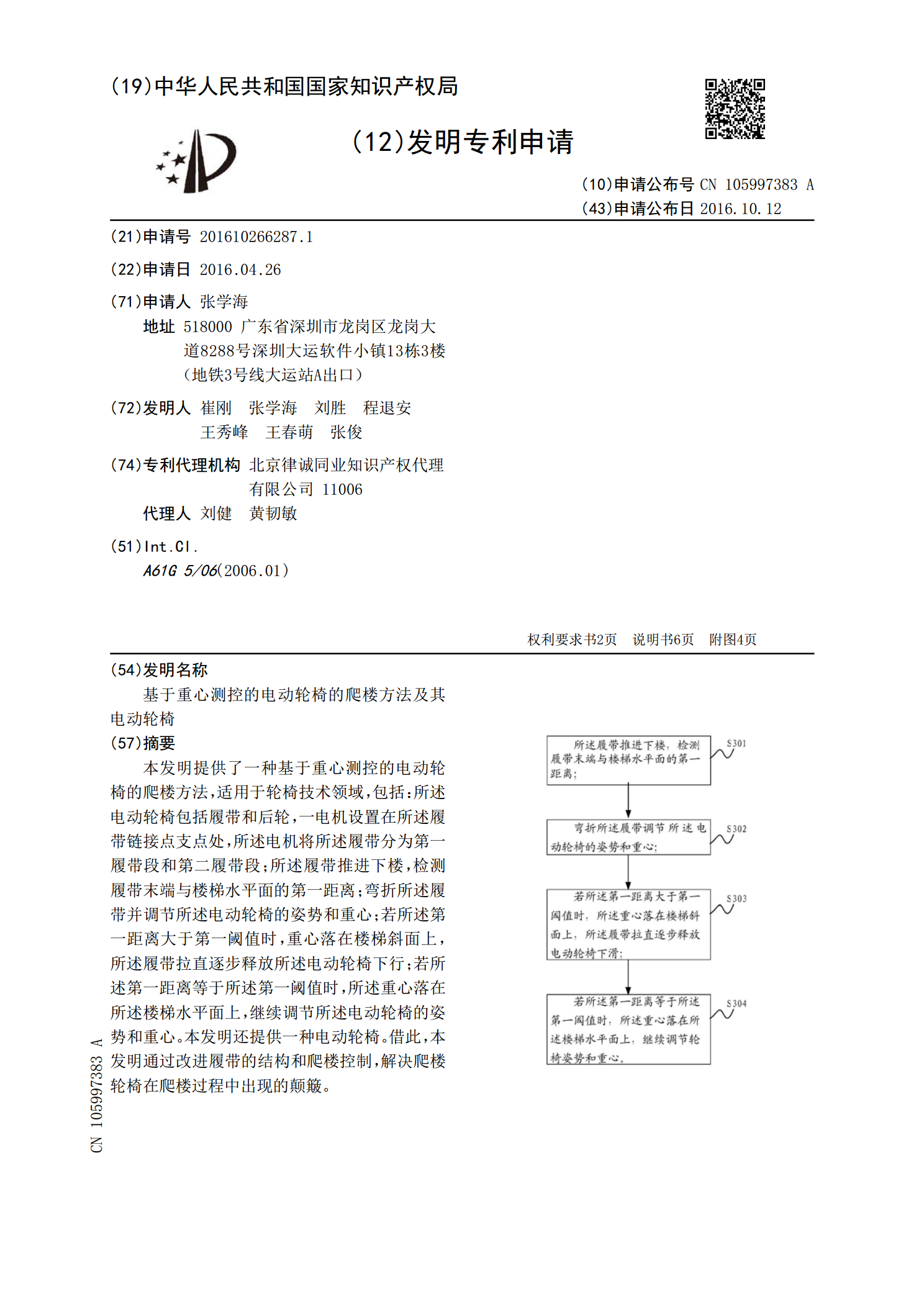
本发明提供了一种基于重心测控的电动轮椅的爬楼方法,适用于轮椅技术领域,包括:所述电动轮椅包括履带和后轮,一电机设置在所述履带链接点支点处,所述电机将所述履带分为第一履带段和第二履带段;所述履带推进下楼,检测履带末端与楼梯水平面的第一距离;弯折所述履带并调节所述电动轮椅的姿势和重心;若所述第一距离大于第一阈值时,重心落在楼梯斜面上,所述履带拉直逐步释放所述电动轮椅下行;若所述第一距离等于所述第一阈值时,所述重心落在所述楼梯水平面上,继续调节所述电动轮椅的姿势和重心。本发明还提供一种电动轮椅。借此,本发明通过

电动爬楼轮椅.pdf
一种电动爬楼轮椅,分护理型和自驾型。其履带行走及驱动机构装于前轮和后轮之间的车架上,前轮装于座椅上,后轮装于后轮升降机构上,座椅与车架铰接,座椅平衡机构与座椅支架铰接,后轮升降机构与车架铰接,蓄电池组件通过控制机构与履带行走电机、座椅平衡电机和后轮升降电机相连接,这三个电机的动力输出端分别通过各自的传动机构与履带行走机构、座椅平衡机构和后轮升降机构相连接。本发明的优点是:既改进了护理型又增加了自驾型;采用了橡胶履带爬楼更安全;履带爬楼改为无极调速,消除了残疾人爬楼时的恐惧感;分这两款车型专门设计了运载电动
电动爬楼轮椅.pdf
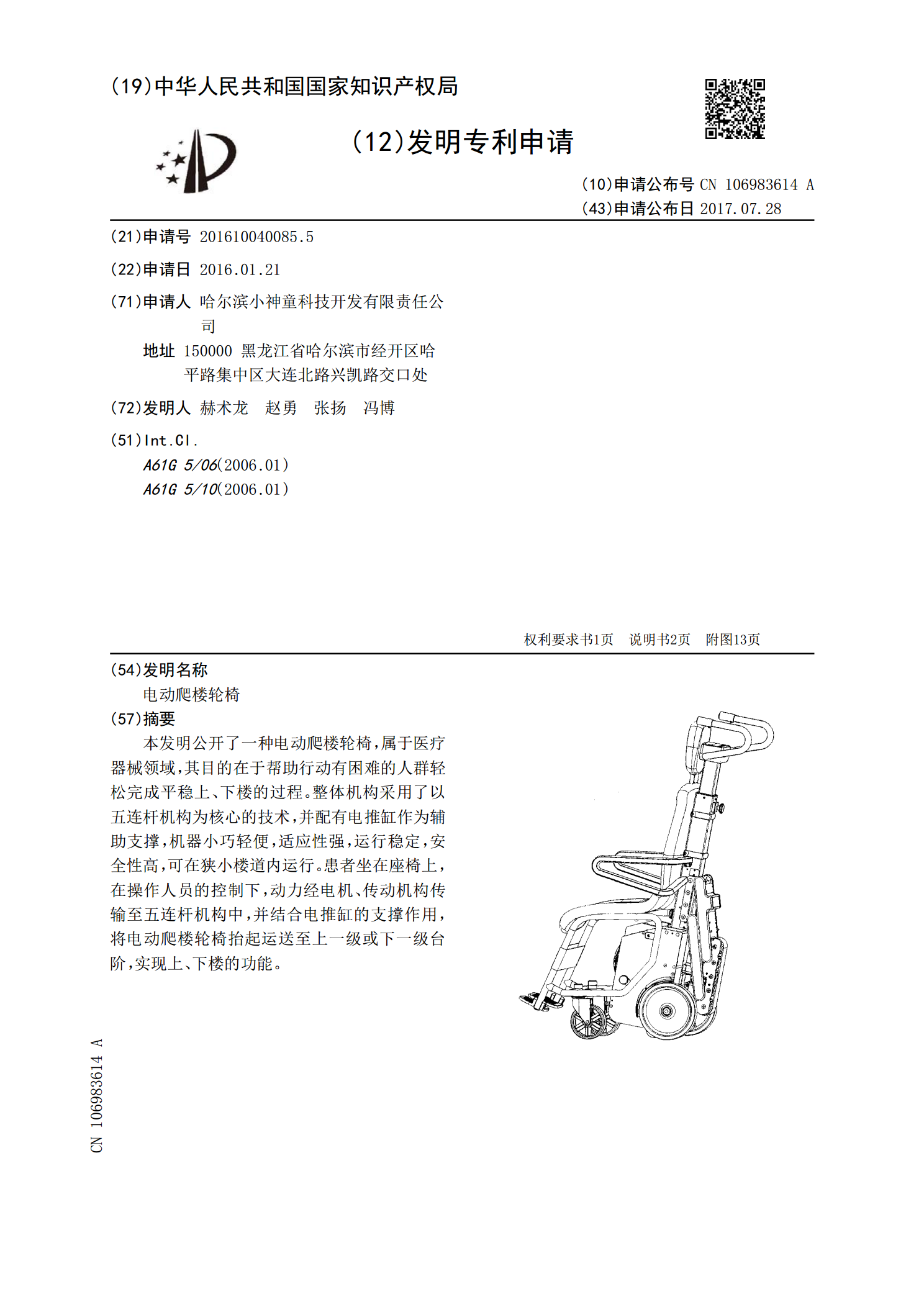
本发明公开了一种电动爬楼轮椅,属于医疗器械领域,其目的在于帮助行动有困难的人群轻松完成平稳上、下楼的过程。整体机构采用了以五连杆机构为核心的技术,并配有电推缸作为辅助支撑,机器小巧轻便,适应性强,运行稳定,安全性高,可在狭小楼道内运行。患者坐在座椅上,在操作人员的控制下,动力经电机、传动机构传输至五连杆机构中,并结合电推缸的支撑作用,将电动爬楼轮椅抬起运送至上一级或下一级台阶,实现上、下楼的功能。
电动爬楼轮椅.pdf
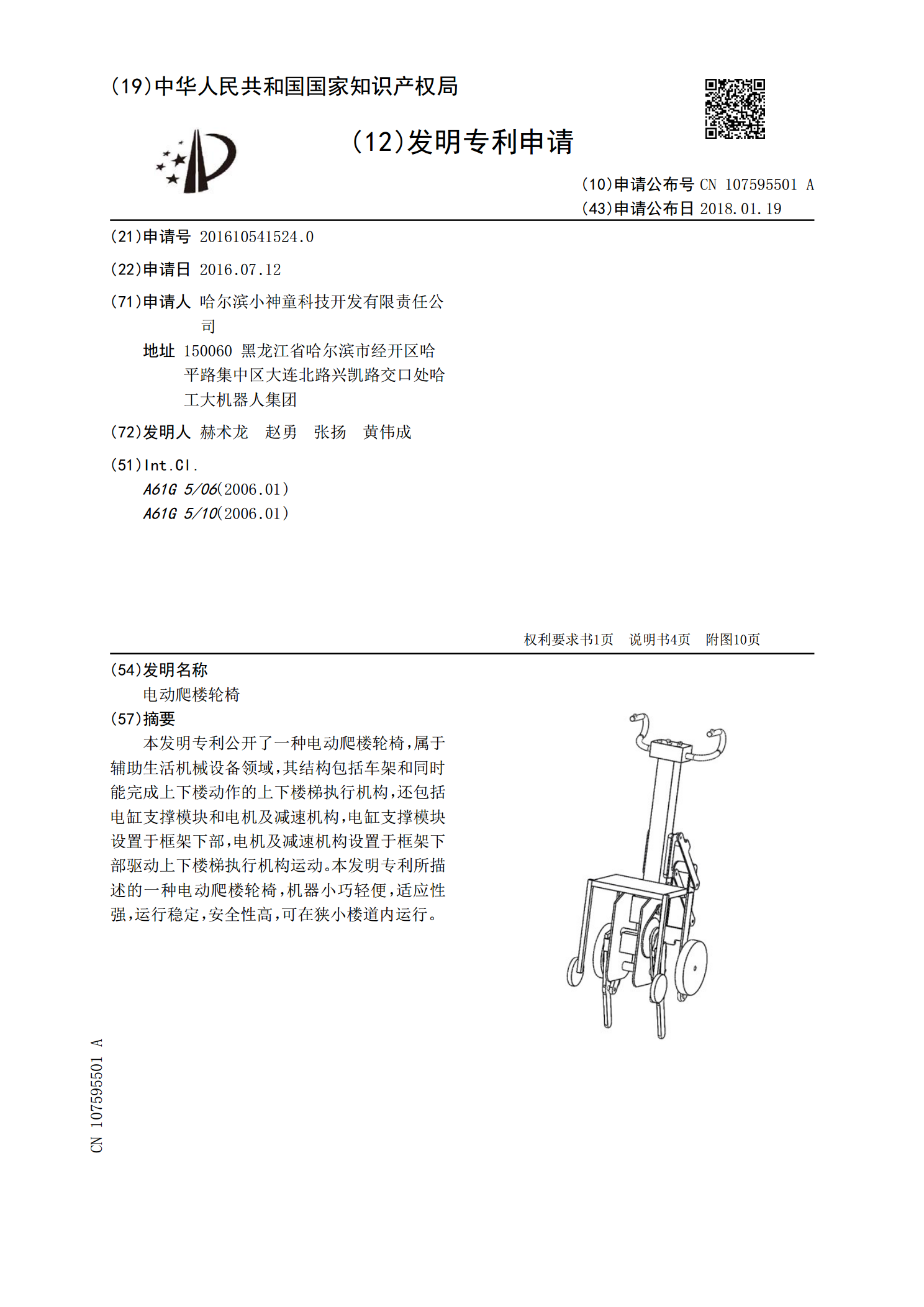
本发明专利公开了一种电动爬楼轮椅,属于辅助生活机械设备领域,其结构包括车架和同时能完成上下楼动作的上下楼梯执行机构,还包括电缸支撑模块和电机及减速机构,电缸支撑模块设置于框架下部,电机及减速机构设置于框架下部驱动上下楼梯执行机构运动。本发明专利所描述的一种电动爬楼轮椅,机器小巧轻便,适应性强,运行稳定,安全性高,可在狭小楼道内运行。