
一种三自由度搬运式机械手臂.pdf

佳晨****ng


1/5
2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种三自由度搬运式机械手臂.pdf
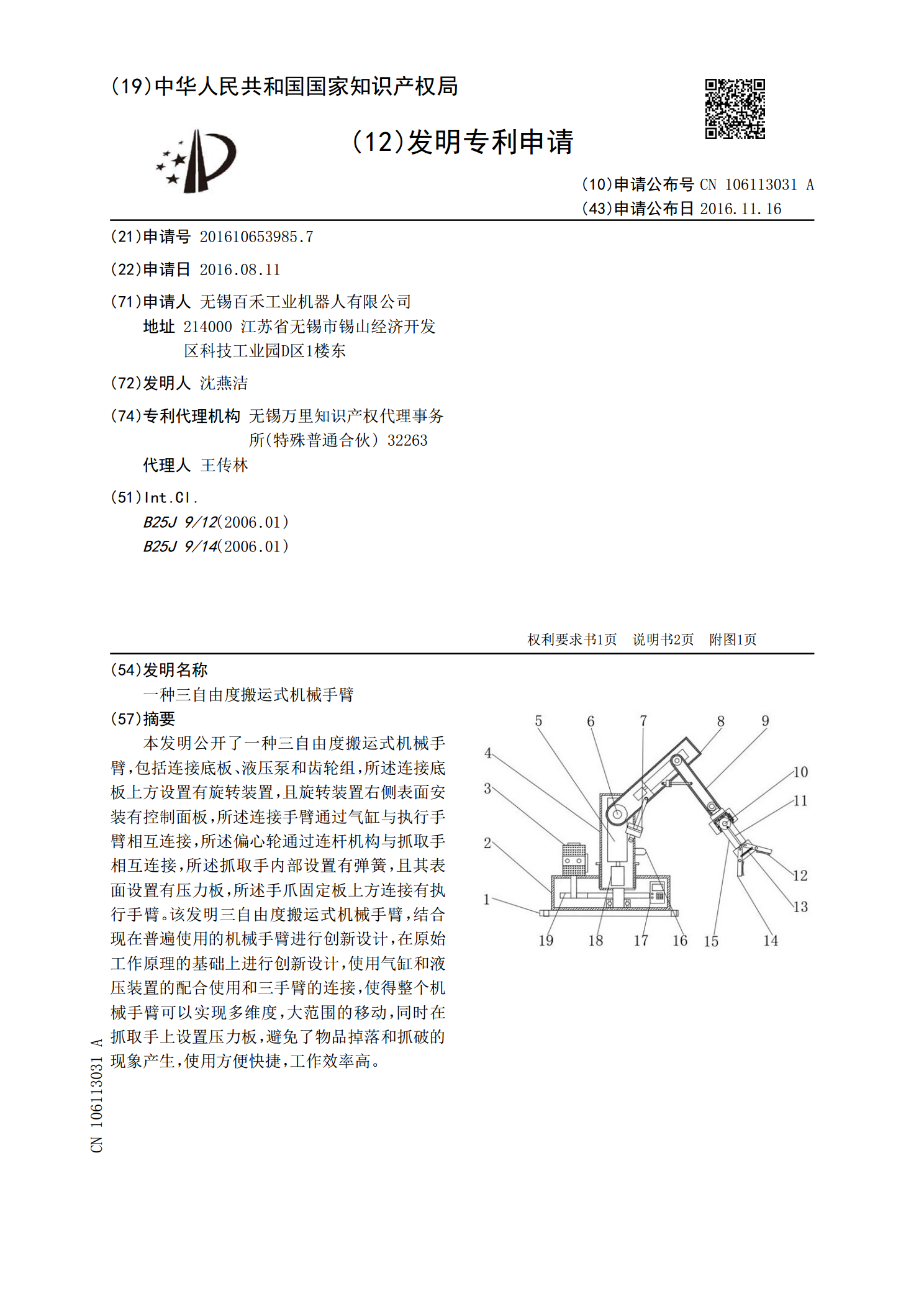
本发明公开了一种三自由度搬运式机械手臂,包括连接底板、液压泵和齿轮组,所述连接底板上方设置有旋转装置,且旋转装置右侧表面安装有控制面板,所述连接手臂通过气缸与执行手臂相互连接,所述偏心轮通过连杆机构与抓取手相互连接,所述抓取手内部设置有弹簧,且其表面设置有压力板,所述手爪固定板上方连接有执行手臂。该发明三自由度搬运式机械手臂,结合现在普遍使用的机械手臂进行创新设计,在原始工作原理的基础上进行创新设计,使用气缸和液压装置的配合使用和三手臂的连接,使得整个机械手臂可以实现多维度,大范围的移动,同时在抓取手上设

六自由度压力气瓶搬运机械手臂的设计与分析.pptx
六自由度压力气瓶搬运机械手臂的设计与分析目录添加章节标题机械手臂概述机械手臂的定义和作用机械手臂的分类和特点机械手臂的应用和发展趋势六自由度压力气瓶搬运机械手臂的设计设计背景和意义设计要求和目标设计方案和原理关键技术和创新点六自由度压力气瓶搬运机械手臂的分析运动学分析动力学分析控制系统分析优化设计和性能评估六自由度压力气瓶搬运机械手臂的实验和测试实验设备和方法实验结果和数据分析结果分析和讨论实验结论和改进方向六自由度压力气瓶搬运机械手臂的应用前景和展望应用场景和市场需求技术挑战和解决方案未来发展方向和趋势

六自由度压力气瓶搬运机械手臂的设计与分析.docx
六自由度压力气瓶搬运机械手臂的设计与分析介绍随着现代化的工业生产,传统的手工操作已经不能满足企业的高效率和高品质的要求。机械化的生产已成为必然趋势。因此,机械手臂逐渐成为企业的重要工具。机械手臂是一种现代化技术的产物,它可用于生产线上的大量操作,例如搬运、装卸、焊接、包装和装配等。机械手臂具有多种自由度,可以灵活地执行不同操作,同时也可以提高工作效率和生产质量。本论文将介绍一款六自由度压力气瓶搬运机械手臂的设计和分析。设计1.软件选择设计机械手臂需要使用CAD软件进行绘图和建模,同时需要进行运动仿真。本设
一种三段手臂式平动起重搬运装置.pdf
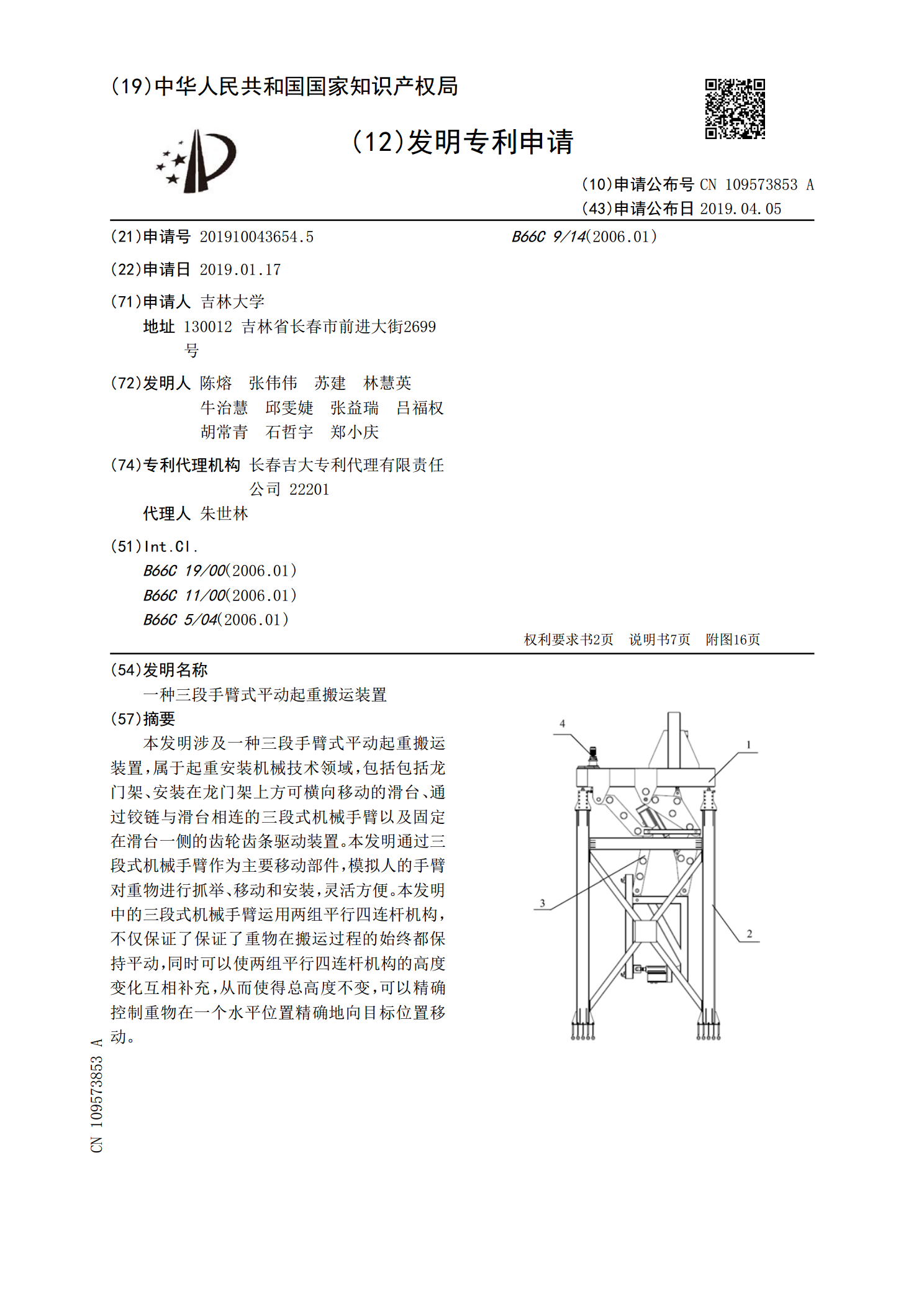
本发明涉及一种三段手臂式平动起重搬运装置,属于起重安装机械技术领域,包括包括龙门架、安装在龙门架上方可横向移动的滑台、通过铰链与滑台相连的三段式机械手臂以及固定在滑台一侧的齿轮齿条驱动装置。本发明通过三段式机械手臂作为主要移动部件,模拟人的手臂对重物进行抓举、移动和安装,灵活方便。本发明中的三段式机械手臂运用两组平行四连杆机构,不仅保证了保证了重物在搬运过程的始终都保持平动,同时可以使两组平行四连杆机构的高度变化互相补充,从而使得总高度不变,可以精确控制重物在一个水平位置精确地向目标位置移动。
一种玻璃基板搬运机械手臂.pdf
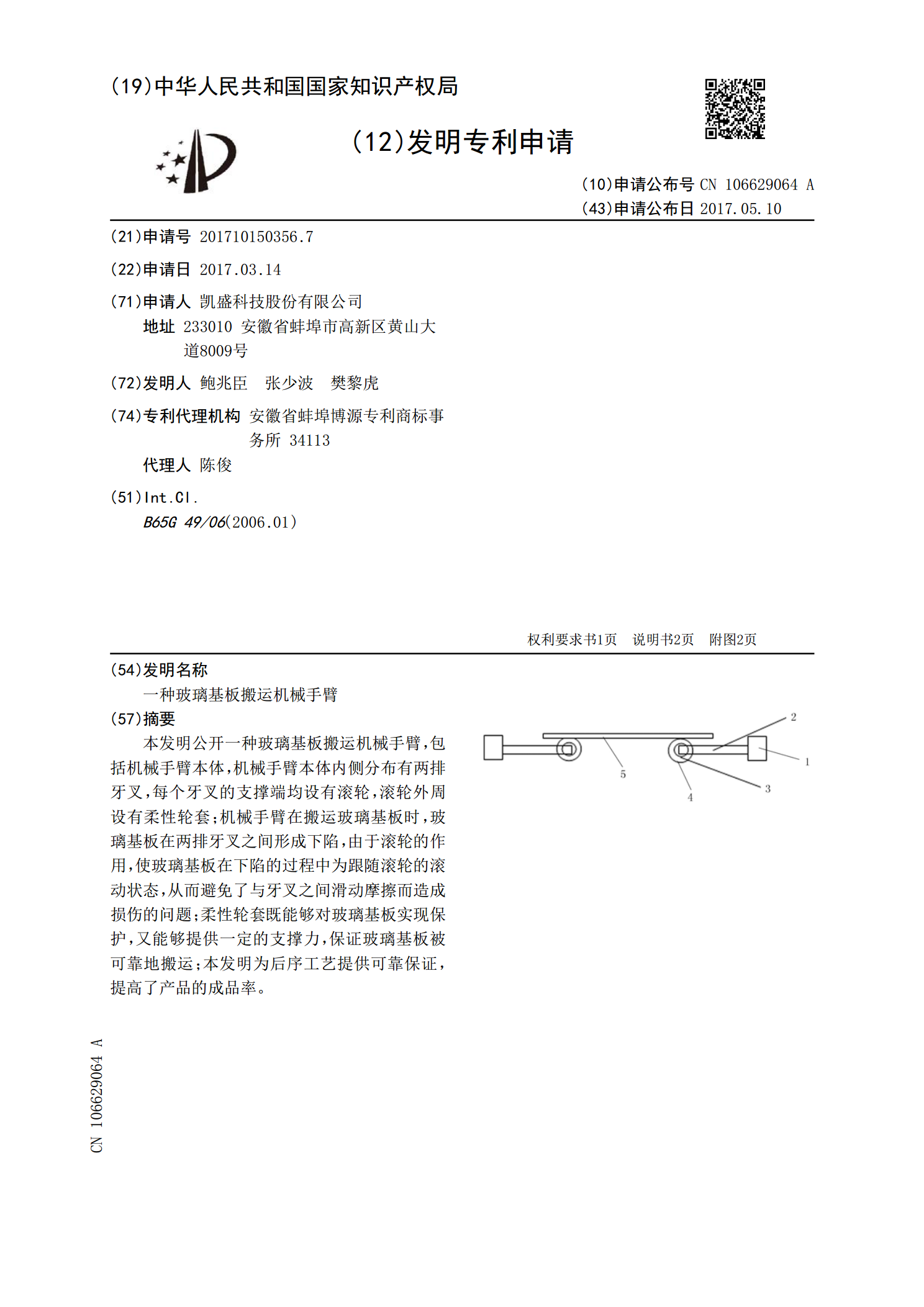
本发明公开一种玻璃基板搬运机械手臂,包括机械手臂本体,机械手臂本体内侧分布有两排牙叉,每个牙叉的支撑端均设有滚轮,滚轮外周设有柔性轮套;机械手臂在搬运玻璃基板时,玻璃基板在两排牙叉之间形成下陷,由于滚轮的作用,使玻璃基板在下陷的过程中为跟随滚轮的滚动状态,从而避免了与牙叉之间滑动摩擦而造成损伤的问题;柔性轮套既能够对玻璃基板实现保护,又能够提供一定的支撑力,保证玻璃基板被可靠地搬运;本发明为后序工艺提供可靠保证,提高了产品的成品率。