
六自由度压力气瓶搬运机械手臂的设计与分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

六自由度压力气瓶搬运机械手臂的设计与分析.pptx
六自由度压力气瓶搬运机械手臂的设计与分析目录添加章节标题机械手臂概述机械手臂的定义和作用机械手臂的分类和特点机械手臂的应用和发展趋势六自由度压力气瓶搬运机械手臂的设计设计背景和意义设计要求和目标设计方案和原理关键技术和创新点六自由度压力气瓶搬运机械手臂的分析运动学分析动力学分析控制系统分析优化设计和性能评估六自由度压力气瓶搬运机械手臂的实验和测试实验设备和方法实验结果和数据分析结果分析和讨论实验结论和改进方向六自由度压力气瓶搬运机械手臂的应用前景和展望应用场景和市场需求技术挑战和解决方案未来发展方向和趋势

六自由度压力气瓶搬运机械手臂的设计与分析.docx
六自由度压力气瓶搬运机械手臂的设计与分析介绍随着现代化的工业生产,传统的手工操作已经不能满足企业的高效率和高品质的要求。机械化的生产已成为必然趋势。因此,机械手臂逐渐成为企业的重要工具。机械手臂是一种现代化技术的产物,它可用于生产线上的大量操作,例如搬运、装卸、焊接、包装和装配等。机械手臂具有多种自由度,可以灵活地执行不同操作,同时也可以提高工作效率和生产质量。本论文将介绍一款六自由度压力气瓶搬运机械手臂的设计和分析。设计1.软件选择设计机械手臂需要使用CAD软件进行绘图和建模,同时需要进行运动仿真。本设

六自由度机械手臂.docx
在现代的工厂加工生产线上,有很多的物件需要进行多角度,位置多姿态的进行变化,用人工自然不用说了,但是用人工的话,效率会比较低,而且可能会因为人工的操作失误导致次品率的上升,这就会给工厂带来不小的损失。所以这就会选择效率高,次品率低的机械臂来完成了,而对于那些空间位置和姿势变化较为复杂的物件来说就需要多自由度的机械臂来完成了。那什么是自由度呢?下面就来和大家分享一下。通常把机械手臂的传送机构机的运动称为自由度。人从手指到肩部共有27个自由度,如果把机械手臂也做成这样多的自由度是很困难的,也是不必要的。从力学

六自由度水下机械手臂的设计与研究.docx
六自由度水下机械手臂的设计与研究随着航海科学技术的不断发展,深海开发和研究得到了越来越多的关注。在深海环境中,需要进行各种各样的任务,如清理海底垃圾、维修海底设施、取样等。这些任务需要机械手臂在水下环境中完成,因此水下机械手臂的设计与研究变得十分重要。六自由度水下机械手臂是一种具有高度灵活性和可控性的机械装置,它可以在水下环境中完成各种复杂的任务。本文旨在介绍六自由度水下机械手臂的设计与研究现状,并探讨其在实际应用中的优势和不足。首先,我们需要了解什么是六自由度水下机械手臂。六自由度机械臂是指机械臂在空间
一种三自由度搬运式机械手臂.pdf
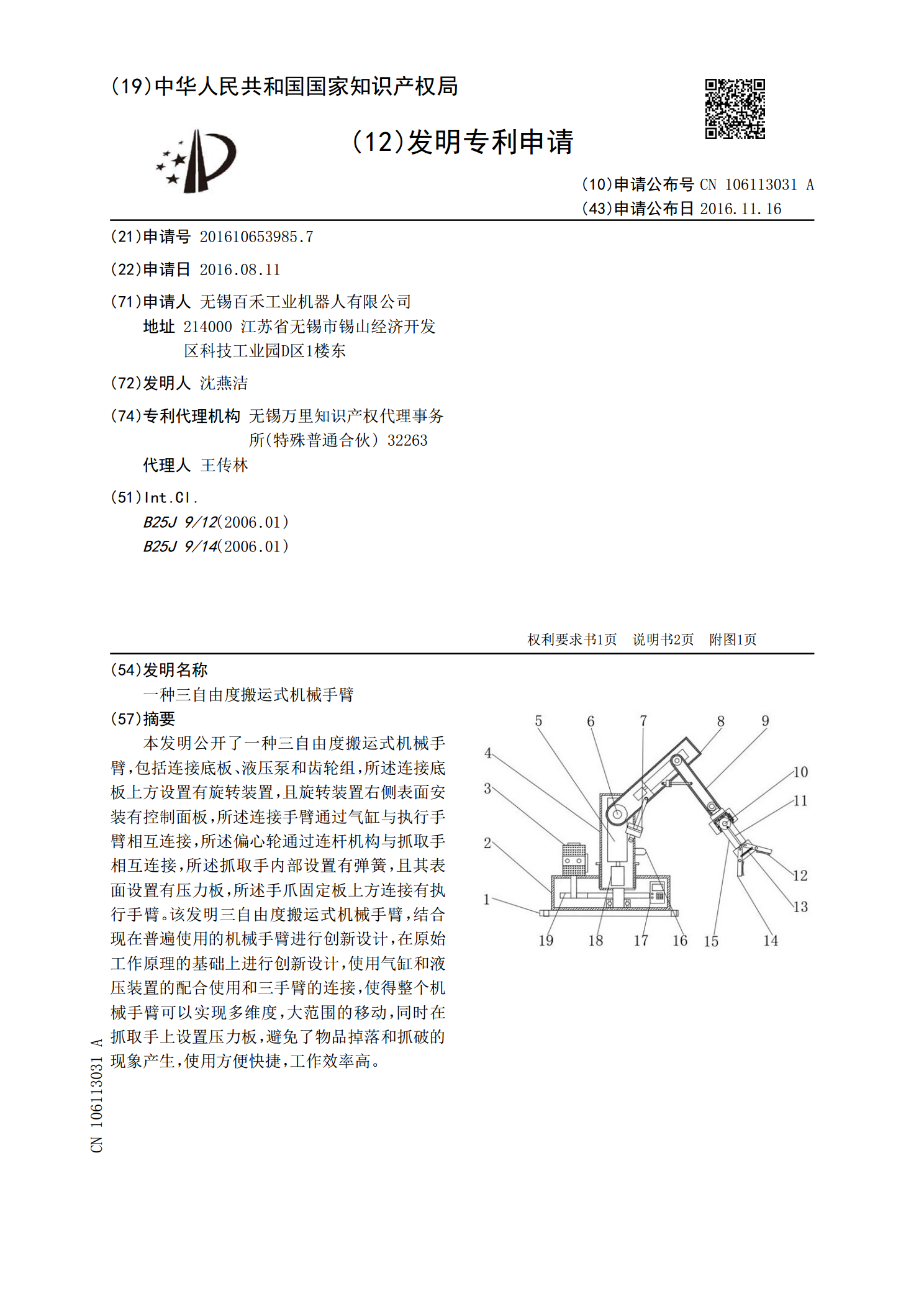
本发明公开了一种三自由度搬运式机械手臂,包括连接底板、液压泵和齿轮组,所述连接底板上方设置有旋转装置,且旋转装置右侧表面安装有控制面板,所述连接手臂通过气缸与执行手臂相互连接,所述偏心轮通过连杆机构与抓取手相互连接,所述抓取手内部设置有弹簧,且其表面设置有压力板,所述手爪固定板上方连接有执行手臂。该发明三自由度搬运式机械手臂,结合现在普遍使用的机械手臂进行创新设计,在原始工作原理的基础上进行创新设计,使用气缸和液压装置的配合使用和三手臂的连接,使得整个机械手臂可以实现多维度,大范围的移动,同时在抓取手上设