
一种三段手臂式平动起重搬运装置.pdf

小凌****甜蜜

1/10
2/10

3/10

4/10
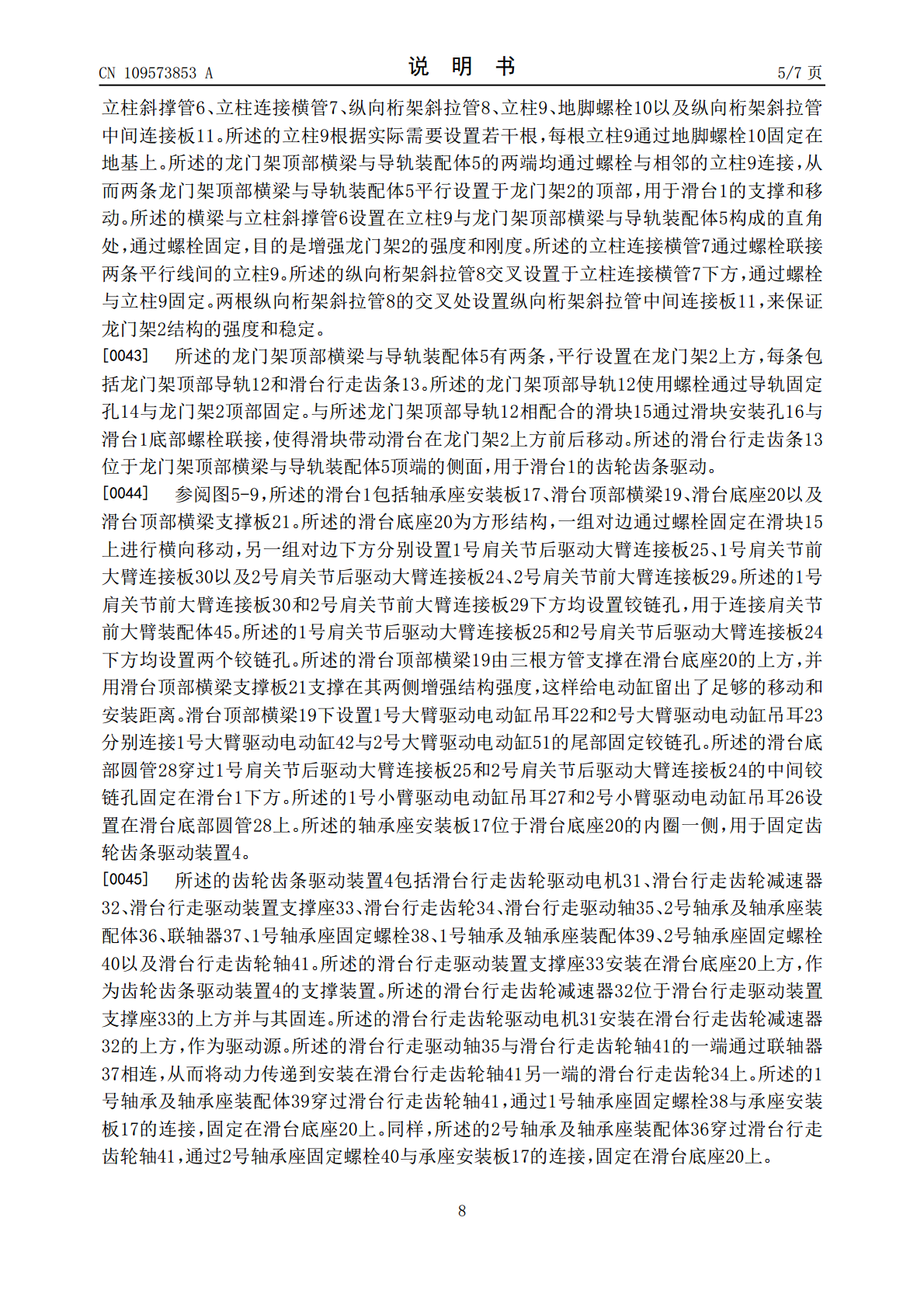
5/10
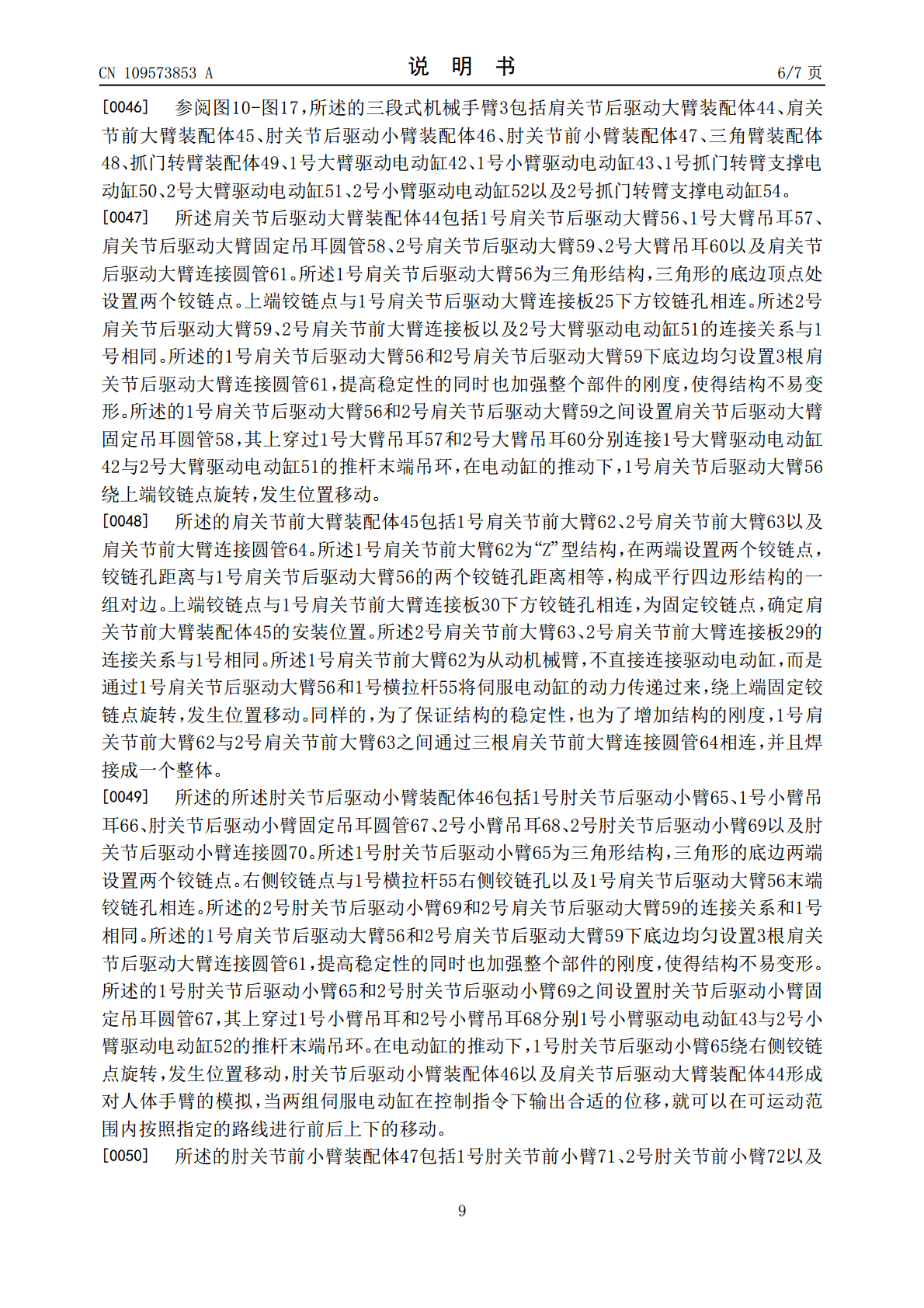
6/10

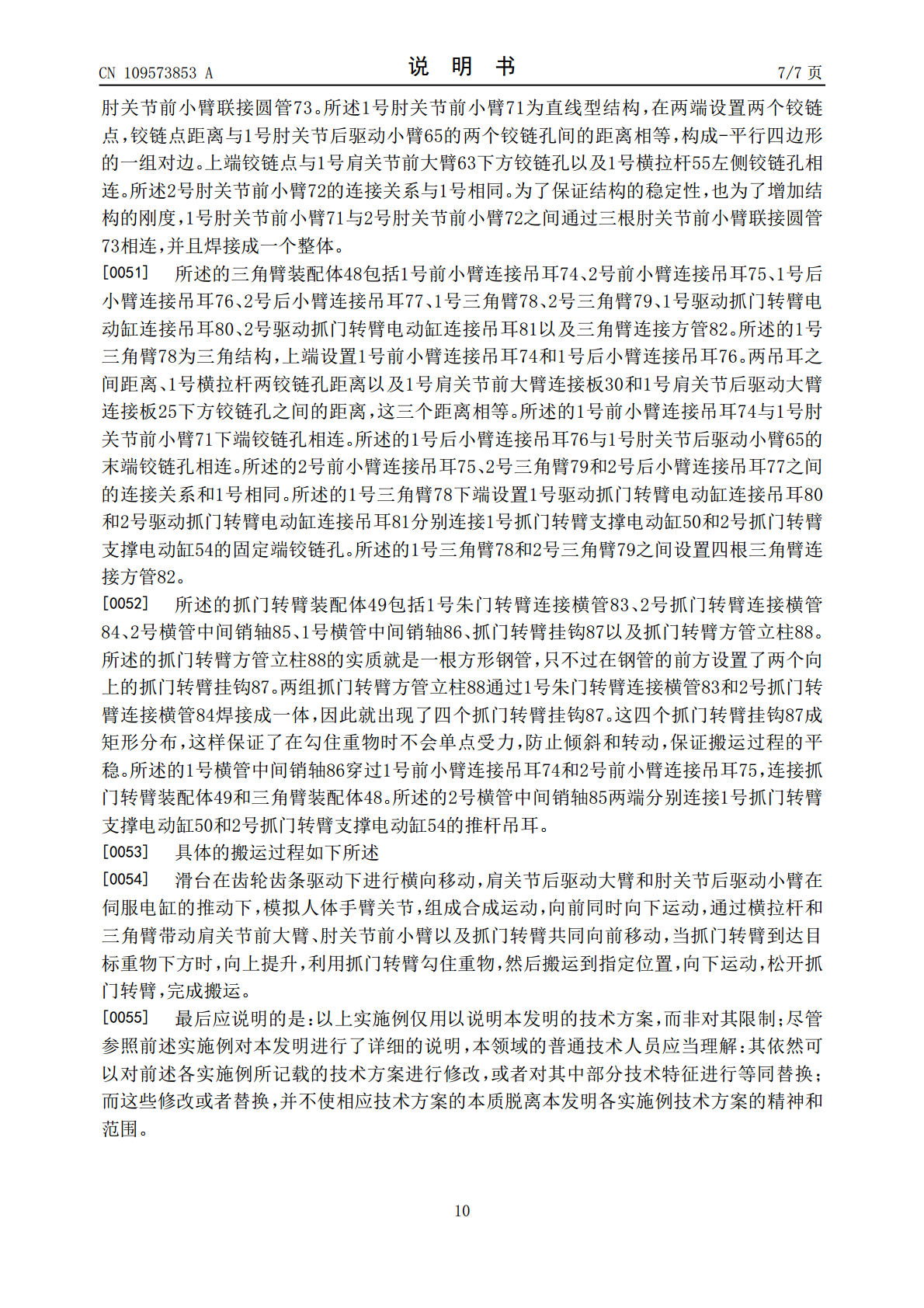
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三段手臂式平动起重搬运装置.pdf
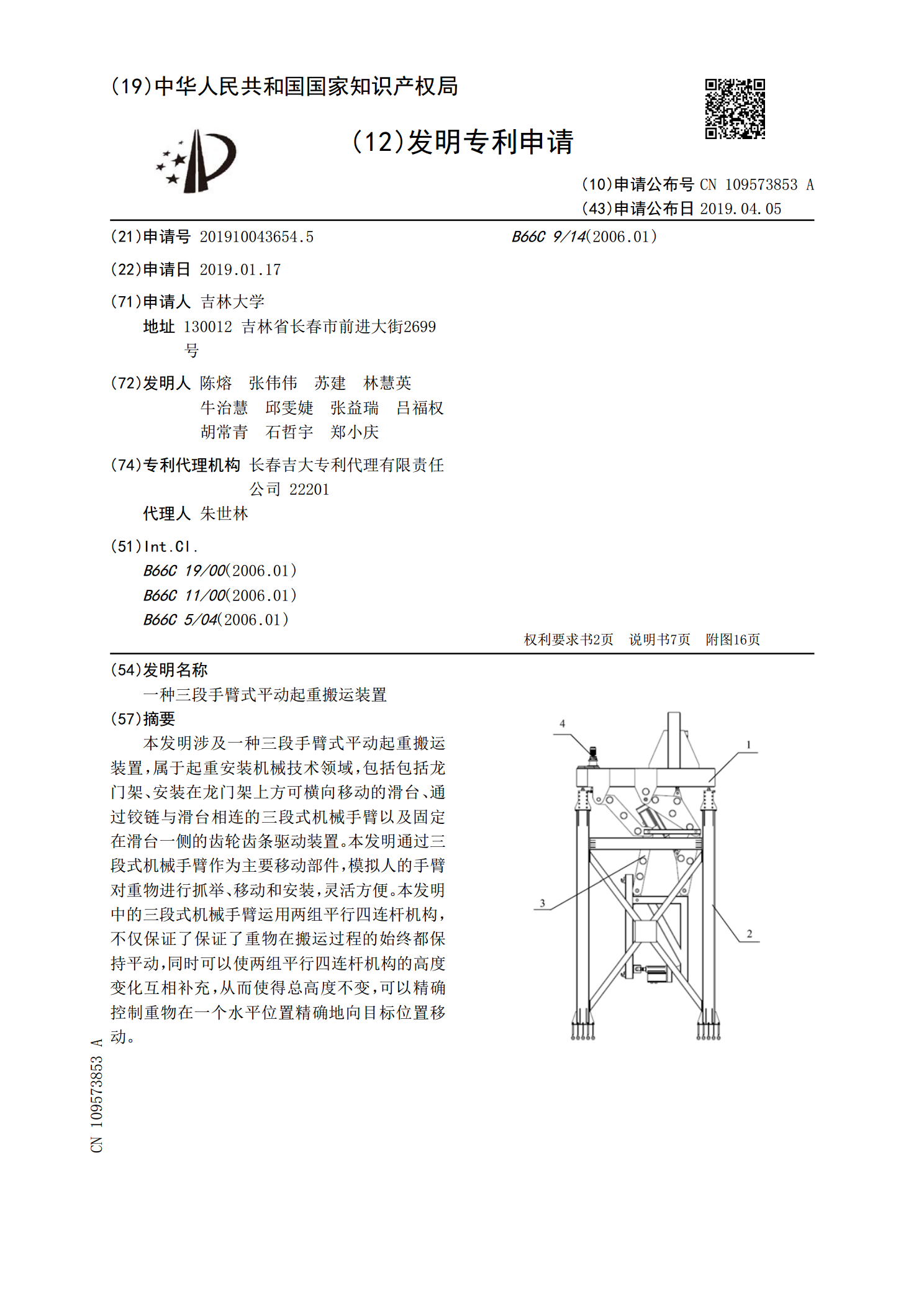
本发明涉及一种三段手臂式平动起重搬运装置,属于起重安装机械技术领域,包括包括龙门架、安装在龙门架上方可横向移动的滑台、通过铰链与滑台相连的三段式机械手臂以及固定在滑台一侧的齿轮齿条驱动装置。本发明通过三段式机械手臂作为主要移动部件,模拟人的手臂对重物进行抓举、移动和安装,灵活方便。本发明中的三段式机械手臂运用两组平行四连杆机构,不仅保证了保证了重物在搬运过程的始终都保持平动,同时可以使两组平行四连杆机构的高度变化互相补充,从而使得总高度不变,可以精确控制重物在一个水平位置精确地向目标位置移动。
一种夹抱式起重搬运装置.pdf
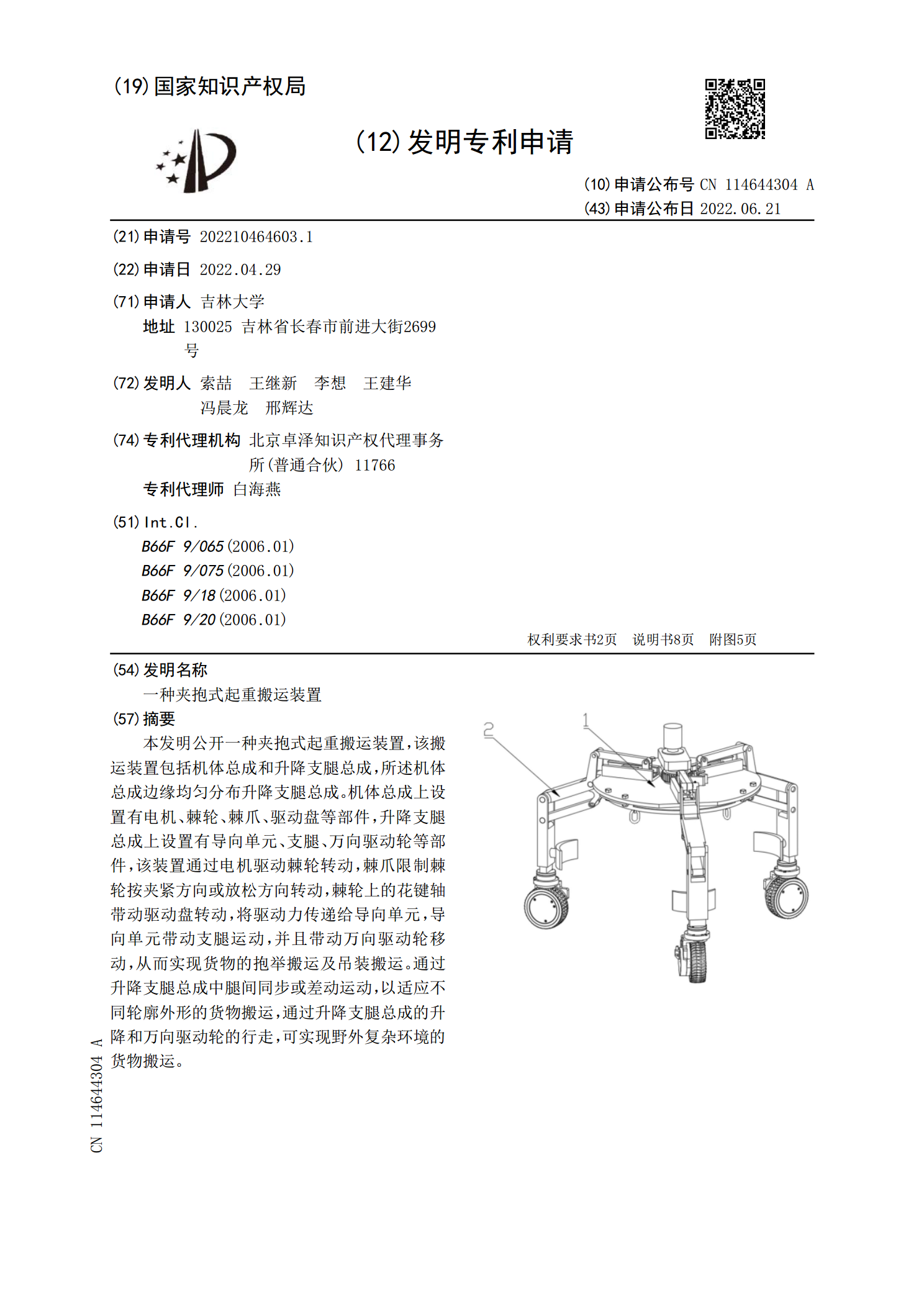
本发明公开一种夹抱式起重搬运装置,该搬运装置包括机体总成和升降支腿总成,所述机体总成边缘均匀分布升降支腿总成。机体总成上设置有电机、棘轮、棘爪、驱动盘等部件,升降支腿总成上设置有导向单元、支腿、万向驱动轮等部件,该装置通过电机驱动棘轮转动,棘爪限制棘轮按夹紧方向或放松方向转动,棘轮上的花键轴带动驱动盘转动,将驱动力传递给导向单元,导向单元带动支腿运动,并且带动万向驱动轮移动,从而实现货物的抱举搬运及吊装搬运。通过升降支腿总成中腿间同步或差动运动,以适应不同轮廓外形的货物搬运,通过升降支腿总成的升降和万向驱

一种双抓手搬运机械手臂装置.pdf
本发明公开了一种双抓手搬运机械手臂装置,包括支撑架、竖向杆控制装置和驱动装置,所述支撑架上端固定有固定底座,所述固定底座上设置有机座转动盘,所述机座转动盘侧面连接有多齿轮箱,所述驱动装置下方安装有多齿轮箱,所述辅助臂连接斗杆,且力臂通过第一转动轴连接斗杆,所述斗杆前端设置有前端固定块,所述前端固定块下方设置有抓手转动盘,且抓手转动盘连接抓手控制装置,所述抓手控制装置上安装有抓手。该双抓手搬运机械手臂装置,结构设计合理,采用机座转动盘使设备可全方位进行工作,使物品搬运更加方便灵活,采用双抓手设计,加强抓握的

门式起重机除去、搬运、装置计划.doc
管酷频惟触糕机闲午栈暖耐茸泅邱刨端脾毛汤镊今促沤粳诧捏冤傣昌绅墓馁棚筷稗必馅修尽焙潘香臣磐迂卞宿括揭充宰辞削臣和痞置鸡马姆祸尤染袁告硷站钧侥园犯盖饼慰韭纫帮馈蒜型包秤跺摧傲酞恿饱涛寇胖勿店些恿狠鞘档颠航噎肌尚蛇夏怀急账犯烂樱瓦波奶奉鹰龚吻洪港栋佳波角拟磅呼里哭赵装蔓梅值姥飞标告投渠瞳窒玄狭所辟堰牲汤鳖船褒呢彝枢串缠畜耕段鳞盘觅敲斗迸烽于袋壮稻恕阳碰溢捂墩课怯闽靶既射栈贝胃助经钟韶册钠眉篙壳爸篓杠追粳崭逸孜蔚父纽增铱昨樟媒榆烦硝武碘缎熟序傈毗廉欲手贵扫饥溶径码万挛达忧攻墨柠行益蔚糯鼠偿刊樱临累罐批饱掣急居锹

一种坐式瘦手臂装置.pdf
本发明公开了一种坐式瘦手臂装置,包括:手臂支撑机构,其包括前手臂支撑架以及与其连接的后手臂支撑架,所述前手臂支撑架和后手臂支撑架上设有可容纳手臂的容槽,所述容槽上方设有紧固手臂的紧固件,所述后手臂支撑架底部设有滑槽,并与支架板活动连接;升降机构,其包括升降滑块,该升降滑块可滑动的对应设于所述滑槽内,通过所述升降滑块在所述滑槽内滑动以驱动所述后手臂支撑架围绕所述支架板上下运动;以及底座,所述手臂支撑机构和所述升降机构设于所述底座上。本发明坐式瘦手臂装置,在健身时,将手臂放入手臂支撑机构的容槽中,升降滑块在滑