
一种工业机器人鞋底涂胶轨迹定位装置及其定位方法.pdf

努力****爱静


1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种工业机器人鞋底涂胶轨迹定位装置及其定位方法.pdf
本发明公开了一种工业机器人鞋底涂胶轨迹定位装置及其定位方法,工业机器人鞋底涂胶轨迹定位装置包括激光雷达、安装支架、输送线,激光雷达安装于安装支架上,输送线布置于安装支架的下方;激光雷达为二维激光雷达。本发明通过激光雷达实时采集与建立鞋底轮廓的三维模型,然后生成相应的涂胶工业机器人运动轨迹,发给工业机器人运行涂胶作业,定位精度高,无需人工提前处理,放置在输送线上的鞋底摆放位置随意,通过激光雷达扫描系统时,都能将鞋底的外形尺寸模型全部扫描出来,并自动识别所需要喷胶的位置,工业机器人具有与输送线同步的自动跟随功
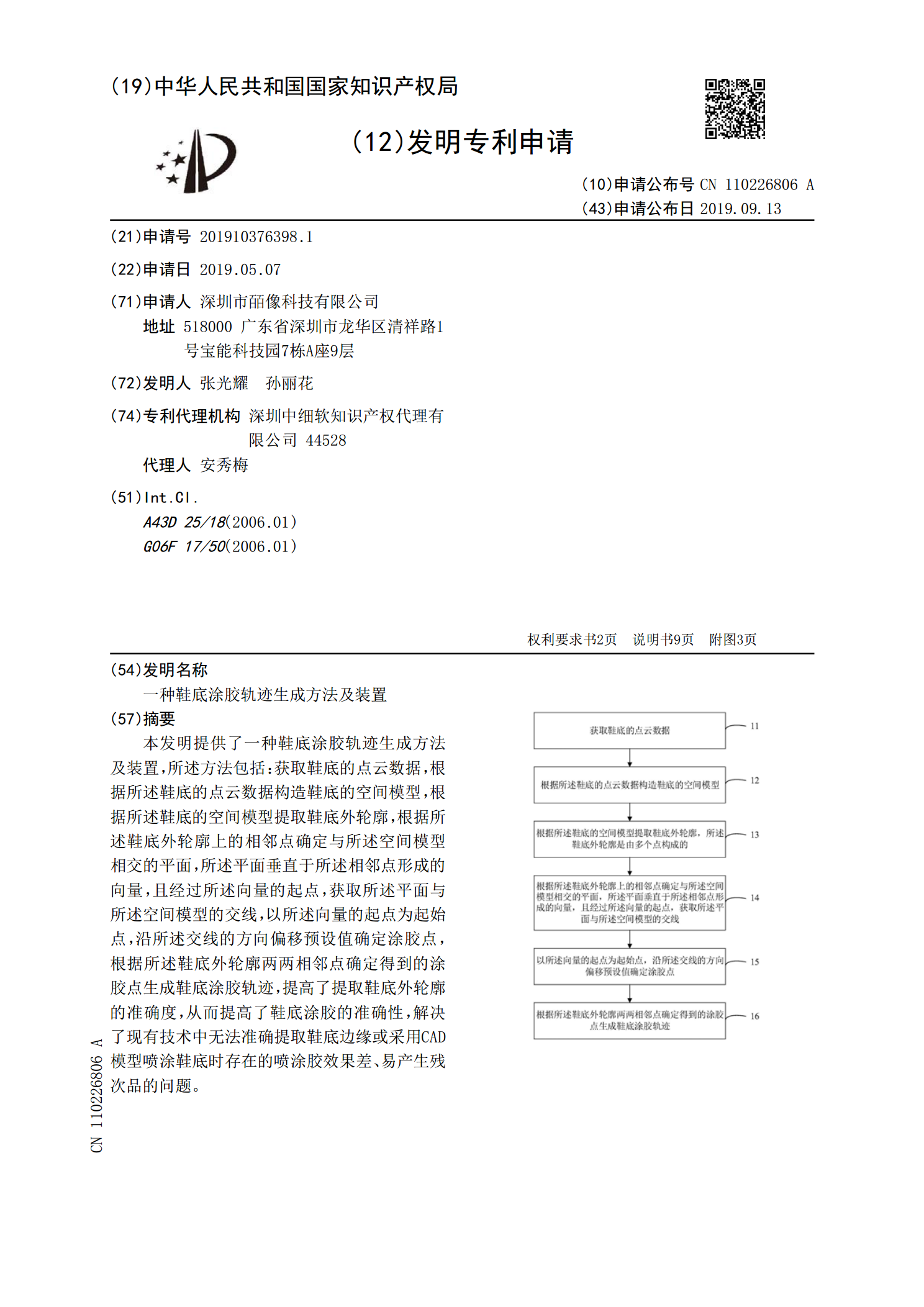
一种鞋底涂胶轨迹生成方法及装置.pdf
本发明提供了一种鞋底涂胶轨迹生成方法及装置,所述方法包括:获取鞋底的点云数据,根据所述鞋底的点云数据构造鞋底的空间模型,根据所述鞋底的空间模型提取鞋底外轮廓,根据所述鞋底外轮廓上的相邻点确定与所述空间模型相交的平面,所述平面垂直于所述相邻点形成的向量,且经过所述向量的起点,获取所述平面与所述空间模型的交线,以所述向量的起点为起始点,沿所述交线的方向偏移预设值确定涂胶点,根据所述鞋底外轮廓两两相邻点确定得到的涂胶点生成鞋底涂胶轨迹,提高了提取鞋底外轮廓的准确度,从而提高了鞋底涂胶的准确性,解决了现有技术中无
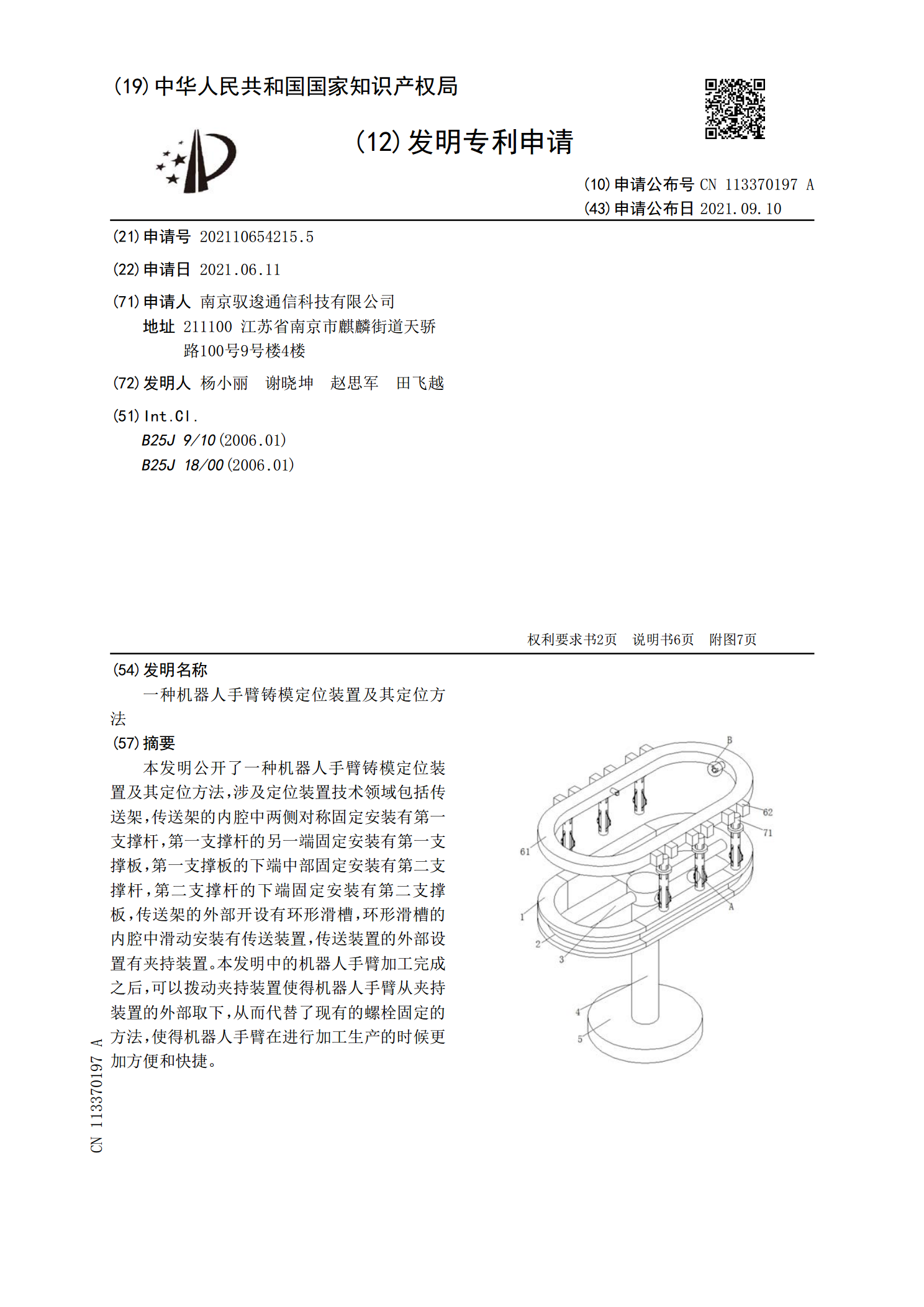
一种机器人手臂铸模定位装置及其定位方法.pdf
本发明公开了一种机器人手臂铸模定位装置及其定位方法,涉及定位装置技术领域包括传送架,传送架的内腔中两侧对称固定安装有第一支撑杆,第一支撑杆的另一端固定安装有第一支撑板,第一支撑板的下端中部固定安装有第二支撑杆,第二支撑杆的下端固定安装有第二支撑板,传送架的外部开设有环形滑槽,环形滑槽的内腔中滑动安装有传送装置,传送装置的外部设置有夹持装置。本发明中的机器人手臂加工完成之后,可以拨动夹持装置使得机器人手臂从夹持装置的外部取下,从而代替了现有的螺栓固定的方法,使得机器人手臂在进行加工生产的时候更加方便和快捷。
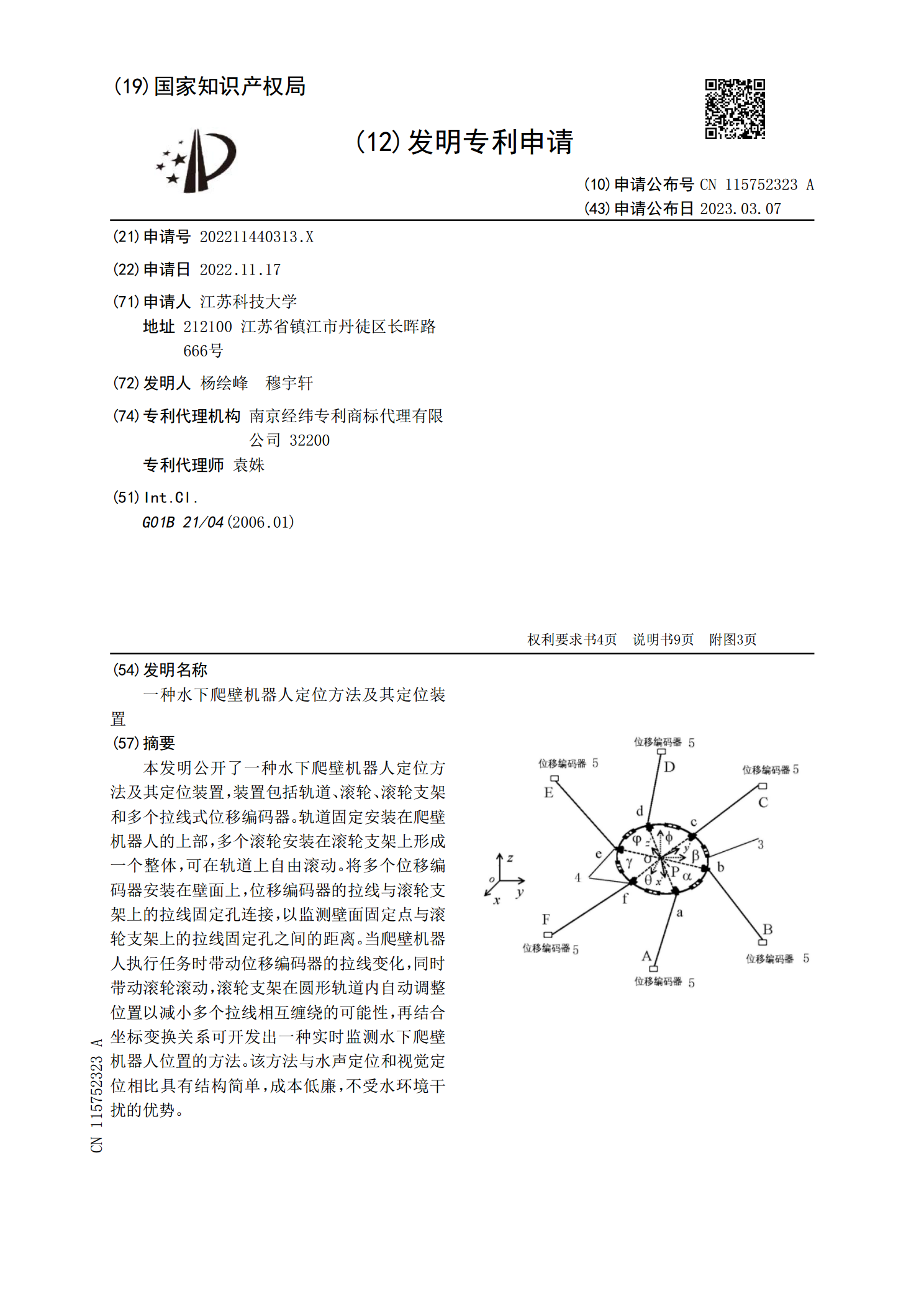
一种水下爬壁机器人定位方法及其定位装置.pdf
本发明公开了一种水下爬壁机器人定位方法及其定位装置,装置包括轨道、滚轮、滚轮支架和多个拉线式位移编码器。轨道固定安装在爬壁机器人的上部,多个滚轮安装在滚轮支架上形成一个整体,可在轨道上自由滚动。将多个位移编码器安装在壁面上,位移编码器的拉线与滚轮支架上的拉线固定孔连接,以监测壁面固定点与滚轮支架上的拉线固定孔之间的距离。当爬壁机器人执行任务时带动位移编码器的拉线变化,同时带动滚轮滚动,滚轮支架在圆形轨道内自动调整位置以减小多个拉线相互缠绕的可能性,再结合坐标变换关系可开发出一种实时监测水下爬壁机器人位置的
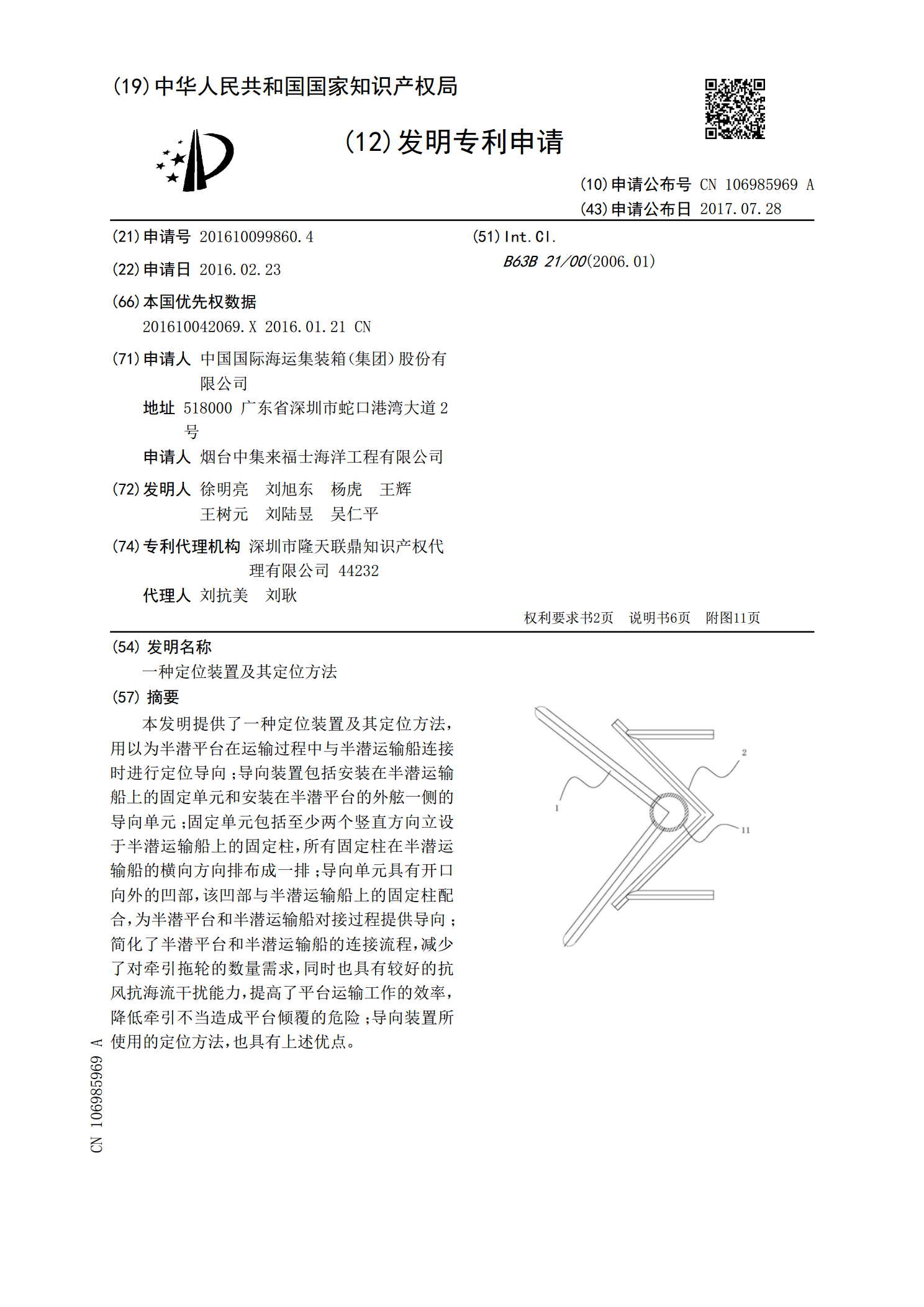
一种定位装置及其定位方法.pdf
本发明提供了一种定位装置及其定位方法,用以为半潜平台在运输过程中与半潜运输船连接时进行定位导向;导向装置包括安装在半潜运输船上的固定单元和安装在半潜平台的外舷一侧的导向单元;固定单元包括至少两个竖直方向立设于半潜运输船上的固定柱,所有固定柱在半潜运输船的横向方向排布成一排;导向单元具有开口向外的凹部,该凹部与半潜运输船上的固定柱配合,为半潜平台和半潜运输船对接过程提供导向;简化了半潜平台和半潜运输船的连接流程,减少了对牵引拖轮的数量需求,同时也具有较好的抗风抗海流干扰能力,提高了平台运输工作的效率,降低牵