
一种轮毂自动分拣系统及其分拣方法.pdf

论文****轩吖

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮毂自动分拣系统及其分拣方法.pdf
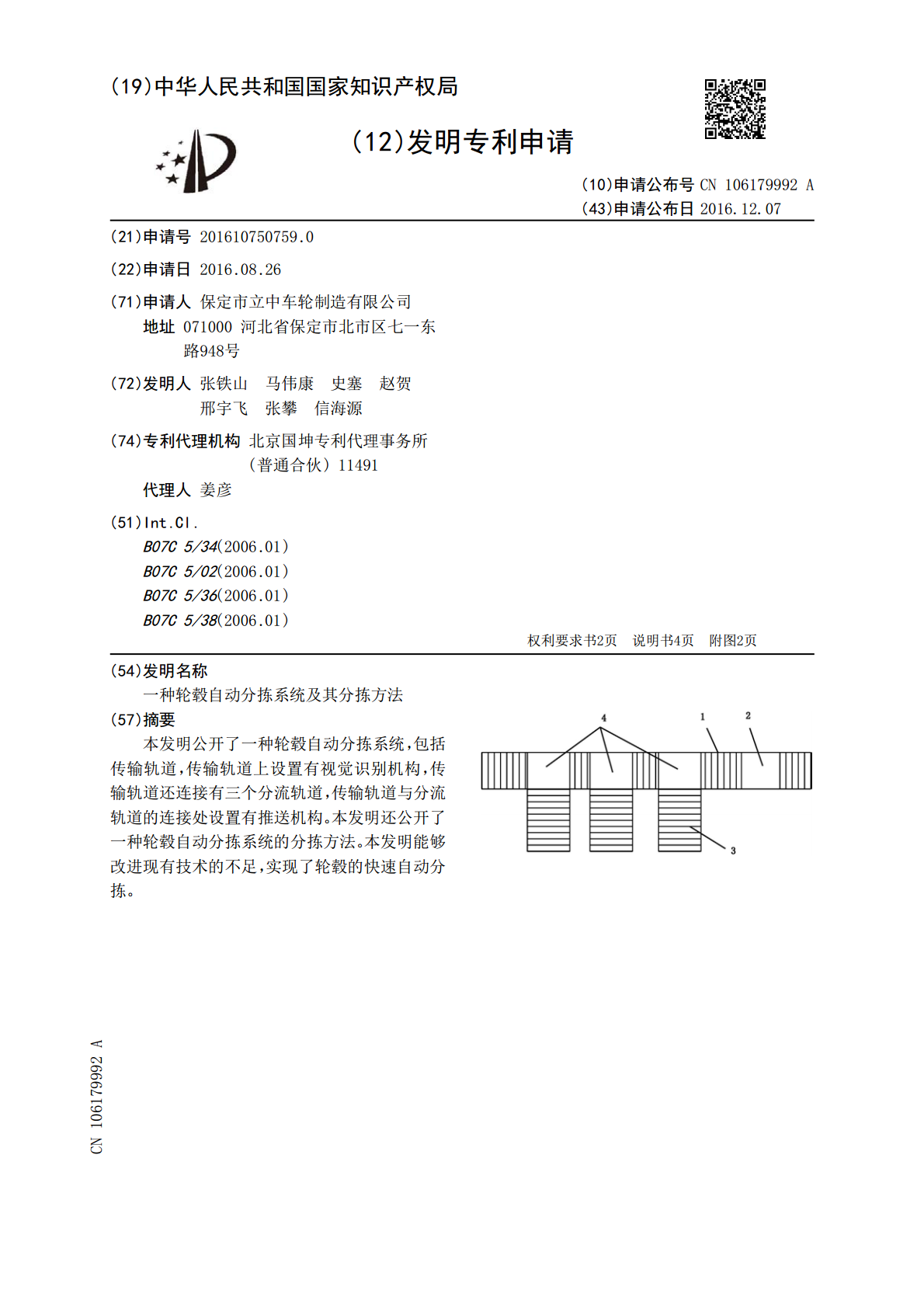
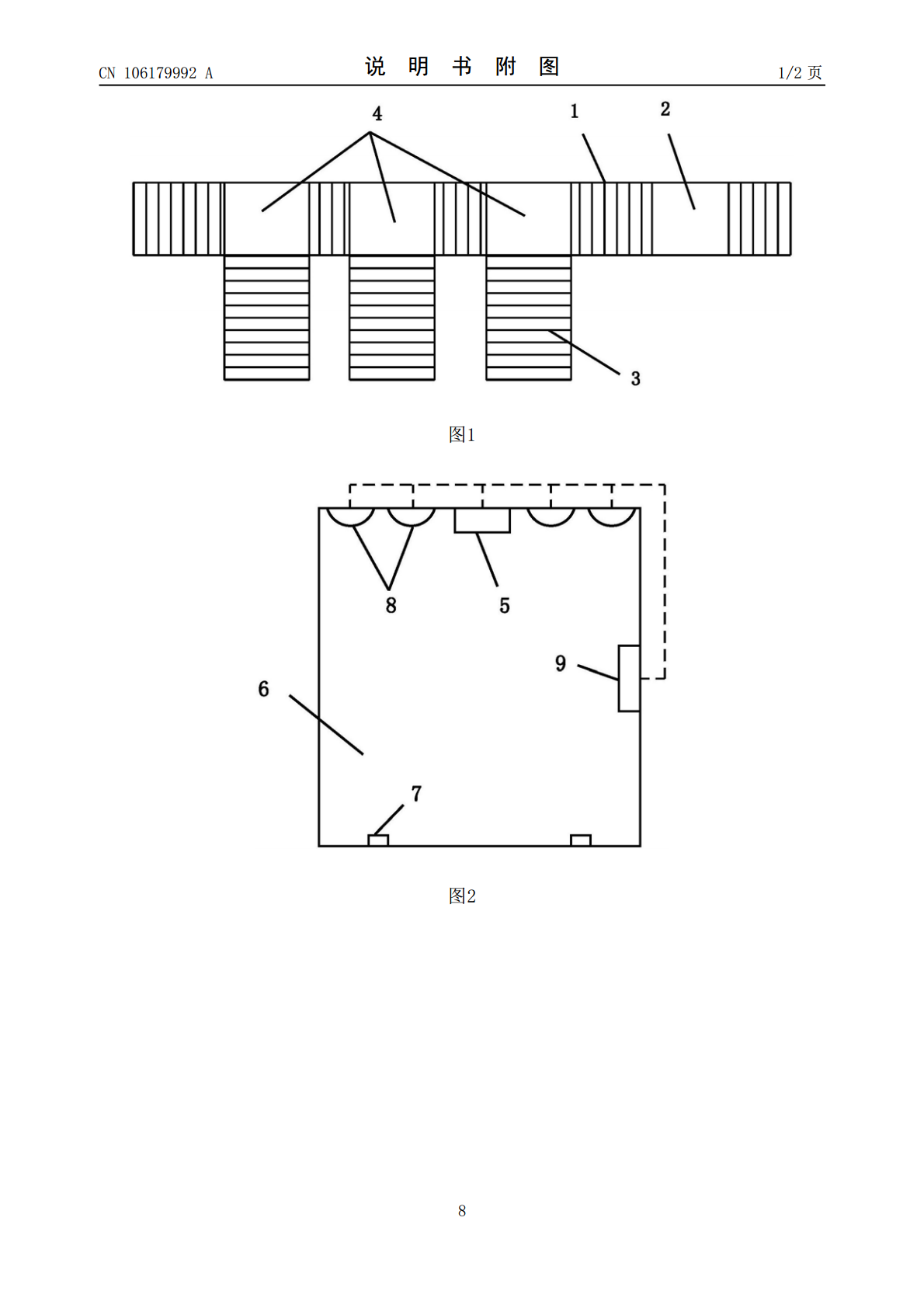
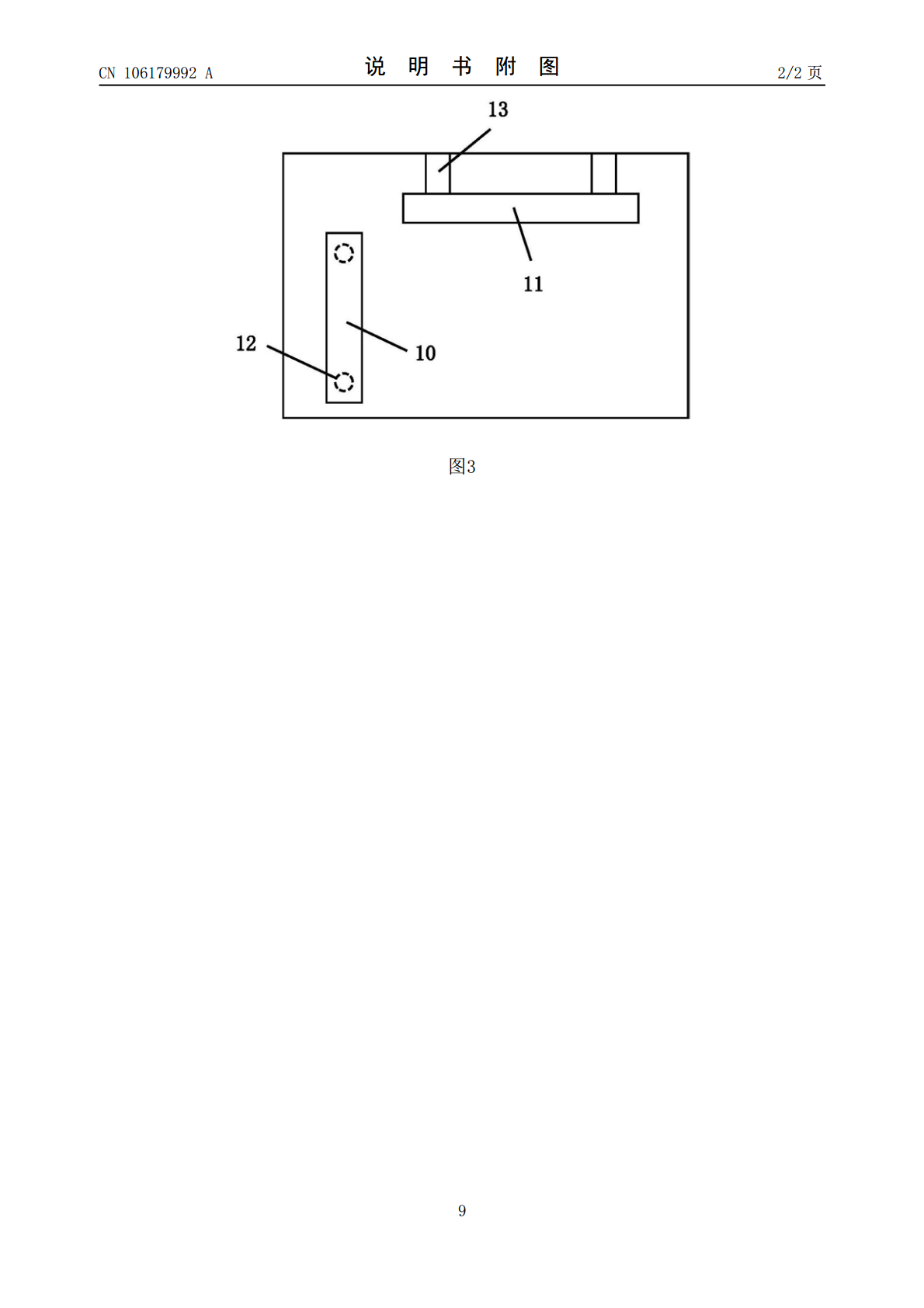
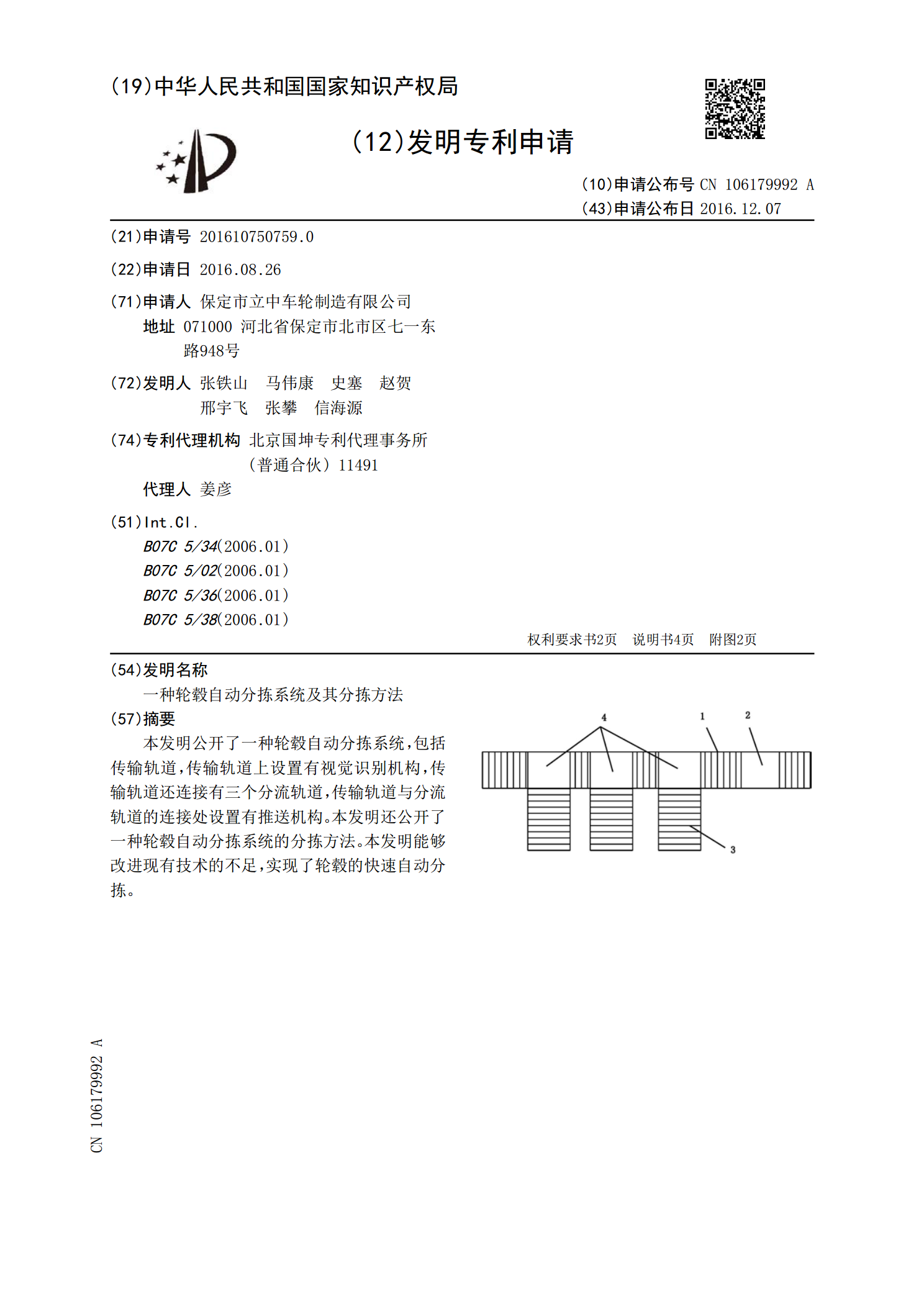
本发明公开了一种轮毂自动分拣系统,包括传输轨道,传输轨道上设置有视觉识别机构,传输轨道还连接有三个分流轨道,传输轨道与分流轨道的连接处设置有推送机构。本发明还公开了一种轮毂自动分拣系统的分拣方法。本发明能够改进现有技术的不足,实现了轮毂的快速自动分拣。

一种轮毂自动分拣循环系统及其循环方法.pdf
本发明属于汽车轮毂技术领域,涉及一种轮毂自动分拣循环系统。包括:主循环物流通道、图像识别系统、支物流通道、主循环物流通道推进系统、支物流通道推进系统、物流通道循环控制系统。本发明还公开了一种轮毂自动分拣循环系统的循环方法。本发明的有益效果为:解决人工分拣劳动强度大,分拣效率低,分拣容易出错的技术问题的同时,通过信号的传输及处理,持续性起到分拣系统循环运动的作用,即不影响主循环物流通道的流转,又能保持各个分支物流通道的连续满负荷工作状态,实现更加经济的技术效果。
基于机器视觉的轮毂外观自动分拣装置、分拣方法和分拣系统.pdf
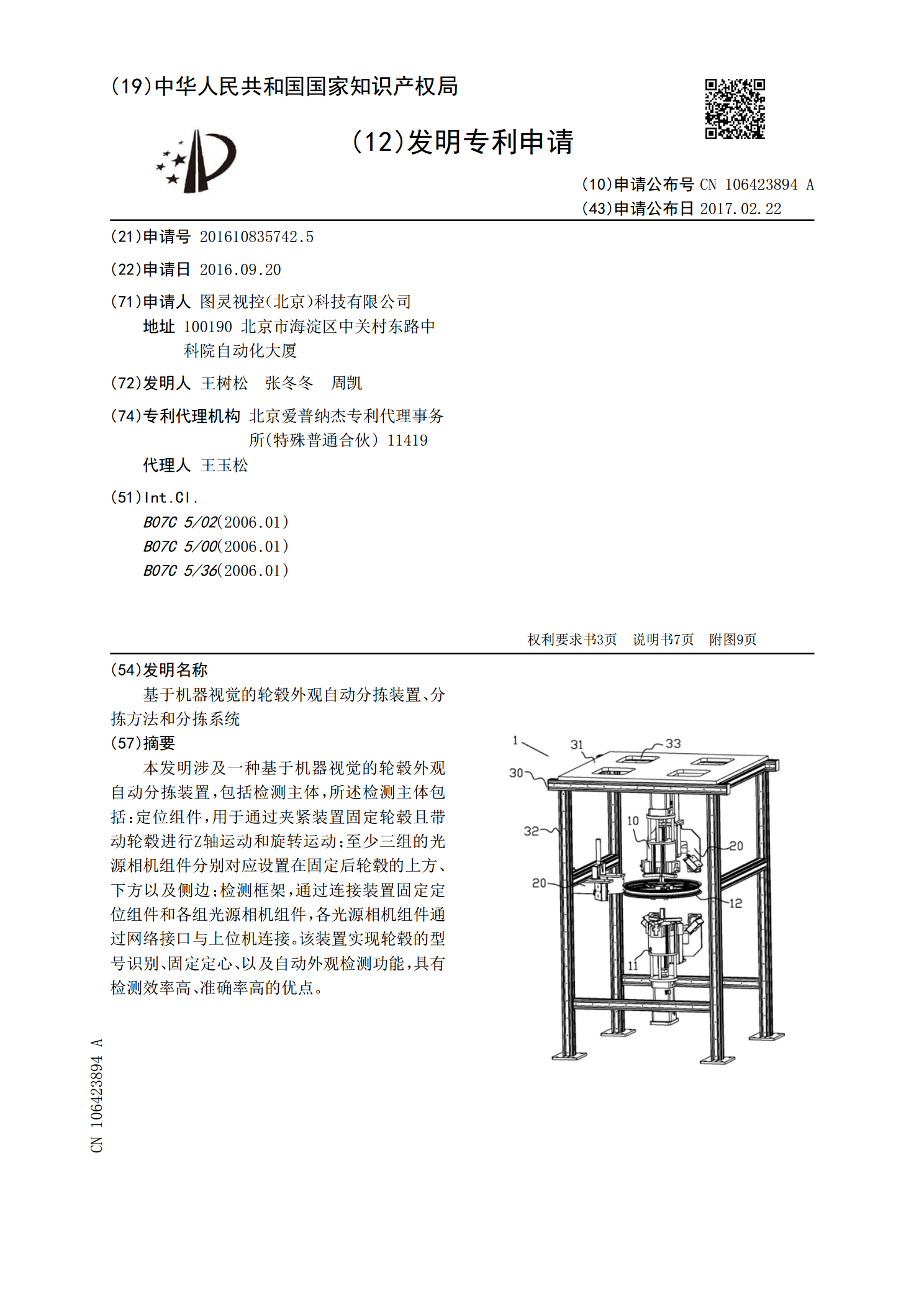
本发明涉及一种基于机器视觉的轮毂外观自动分拣装置,包括检测主体,所述检测主体包括:定位组件,用于通过夹紧装置固定轮毂且带动轮毂进行Z轴运动和旋转运动;至少三组的光源相机组件分别对应设置在固定后轮毂的上方、下方以及侧边;检测框架,通过连接装置固定定位组件和各组光源相机组件,各光源相机组件通过网络接口与上位机连接。该装置实现轮毂的型号识别、固定定心、以及自动外观检测功能,具有检测效率高、准确率高的优点。
一种用于建筑的废料垃圾自动分拣方法及其分拣系统.pdf
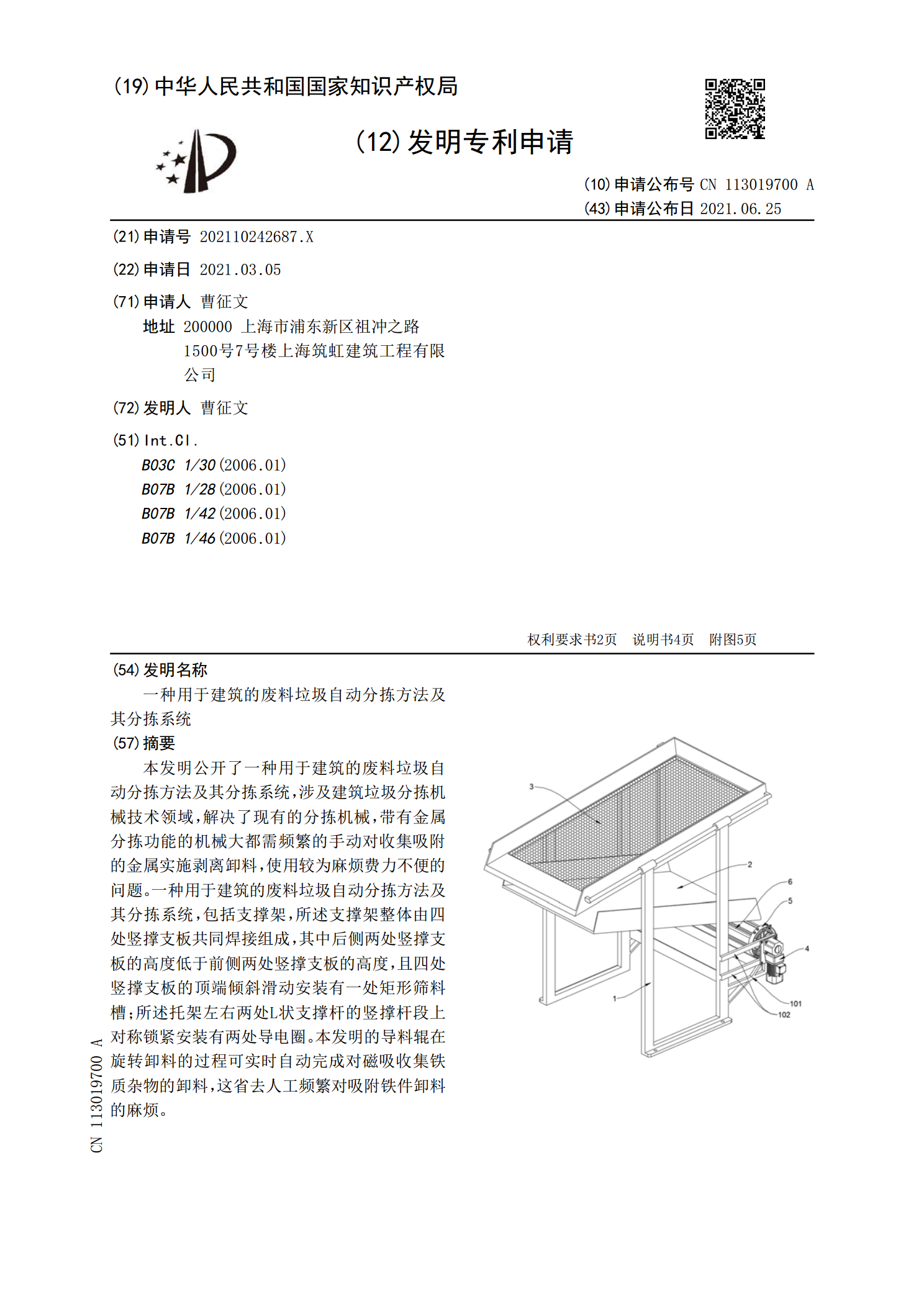
本发明公开了一种用于建筑的废料垃圾自动分拣方法及其分拣系统,涉及建筑垃圾分拣机械技术领域,解决了现有的分拣机械,带有金属分拣功能的机械大都需频繁的手动对收集吸附的金属实施剥离卸料,使用较为麻烦费力不便的问题。一种用于建筑的废料垃圾自动分拣方法及其分拣系统,包括支撑架,所述支撑架整体由四处竖撑支板共同焊接组成,其中后侧两处竖撑支板的高度低于前侧两处竖撑支板的高度,且四处竖撑支板的顶端倾斜滑动安装有一处矩形筛料槽;所述托架左右两处L状支撑杆的竖撑杆段上对称锁紧安装有两处导电圈。本发明的导料辊在旋转卸料的过程可

轮毂坯件自动分拣系统.pdf
本发明公开了一种轮毂坯件自动分拣系统,包括轮毂自动识别系统;所述轮毂自动识别系统包括设置于输送轨道一侧的第一红外发光器、设置于所述第一红外发光器竖直上方的第二红外发光器、设置于所述输送轨道另一侧的并且与所述第一红外发光器相对设置第一红外受光器、位于所述第一红外受光器竖直上方并且与所述第二红外发光器相对设置的第二红外受光器,以及设置于输送轨道一侧的第一红外测距仪、位于所述输送轨道另一侧并且与所述第一红外测距仪相对设置的第二红外测距仪。本发明的轮毂坯件自动分拣系统,结构简单,方便操作,能够有效分辨低压铸造坯件