
纯电动汽车全速自适应巡航控制系统的研究.doc

Ja****20


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

纯电动汽车全速自适应巡航控制系统的研究.doc
纯电动汽车全速自适应巡航控制系统的研究随着节能环保的提倡和智能化热潮的兴起,电动汽车先进驾驶员辅助系统的开发越来越被重视。目前,电动汽车自适应巡航工作车速受到限制,跟踪性和抗干扰能力差,不能完全适应复杂多变的行驶环境。因此研究自适应巡航控制系统在全速和外界干扰工况下的响应具有重要意义。本文研究了纯电动汽车自适应巡航控制系统不同工作模式的切换和执行策略,采用了基于二次型优化和模型预测控制理论的纵向控制方法,针对不同驾驶工况进行仿真分析,验证了自适应巡航控制策略和算法的有效性。本文选取车辆的纵向车速作为被控对

纯电动汽车全速自适应巡航控制系统的研究.doc
纯电动汽车全速自适应巡航控制系统的研究随着节能环保的提倡和智能化热潮的兴起,电动汽车先进驾驶员辅助系统的开发越来越被重视。目前,电动汽车自适应巡航工作车速受到限制,跟踪性和抗干扰能力差,不能完全适应复杂多变的行驶环境。因此研究自适应巡航控制系统在全速和外界干扰工况下的响应具有重要意义。本文研究了纯电动汽车自适应巡航控制系统不同工作模式的切换和执行策略,采用了基于二次型优化和模型预测控制理论的纵向控制方法,针对不同驾驶工况进行仿真分析,验证了自适应巡航控制策略和算法的有效性。本文选取车辆的纵向车速作为被控对
用于车辆的全速段自适应巡航控制.pdf
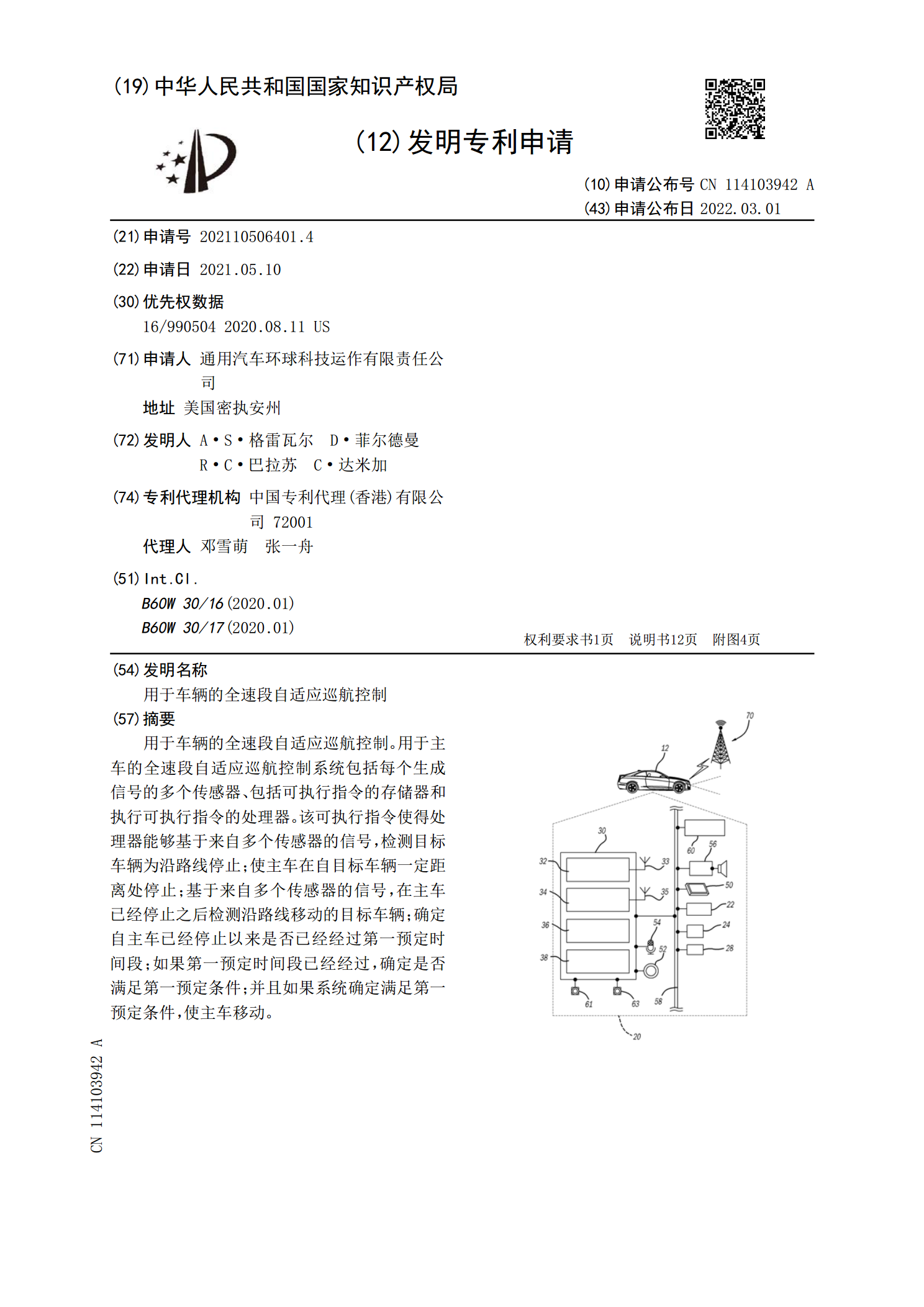
用于车辆的全速段自适应巡航控制。用于主车的全速段自适应巡航控制系统包括每个生成信号的多个传感器、包括可执行指令的存储器和执行可执行指令的处理器。该可执行指令使得处理器能够基于来自多个传感器的信号,检测目标车辆为沿路线停止;使主车在自目标车辆一定距离处停止;基于来自多个传感器的信号,在主车已经停止之后检测沿路线移动的目标车辆;确定自主车已经停止以来是否已经经过第一预定时间段;如果第一预定时间段已经经过,确定是否满足第一预定条件;并且如果系统确定满足第一预定条件,使主车移动。

汽车自适应巡航控制系统的研究.docx
汽车自适应巡航控制系统的研究一、概述随着汽车技术的飞速发展,自动驾驶和智能驾驶逐渐成为汽车工业的研究热点。作为智能驾驶技术的重要组成部分,自适应巡航控制系统(AdaptiveCruiseControl,简称ACC)受到了广泛关注。自适应巡航控制系统是一种智能化的车速控制系统,它能够根据前方道路状况自动调整车速,保持与前车的安全距离,从而提高驾驶的安全性和舒适性。自适应巡航控制系统的发展历程可以追溯到上世纪90年代,随着雷达、传感器、计算机等技术的不断进步,自适应巡航控制系统的性能得到了显著提升。该系统已经

车辆自适应巡航控制系统的研究现状.docx
车辆自适应巡航控制系统的研究现状车辆自适应巡航控制系统的研究现状摘要:随着车辆自动化技术的不断发展,车辆自适应巡航控制系统成为当前研究热点之一。本文以车辆自适应巡航控制系统为研究对象,综述了该领域的研究现状,包括系统原理、控制策略和应用场景等方面的进展。通过对相关文献的综合分析和整理,总结了目前车辆自适应巡航控制系统的关键技术和存在的问题,并对未来的研究趋势进行了展望。关键词:车辆自动化;自适应巡航控制系统;技术进展;问题与挑战;研究趋势1.引言近年来,随着自动驾驶技术的快速发展,车辆的自动化水平不断提高