
一种具有壁面转换功能的越障爬壁机器人.pdf

一条****贺6

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有壁面转换功能的越障爬壁机器人.pdf
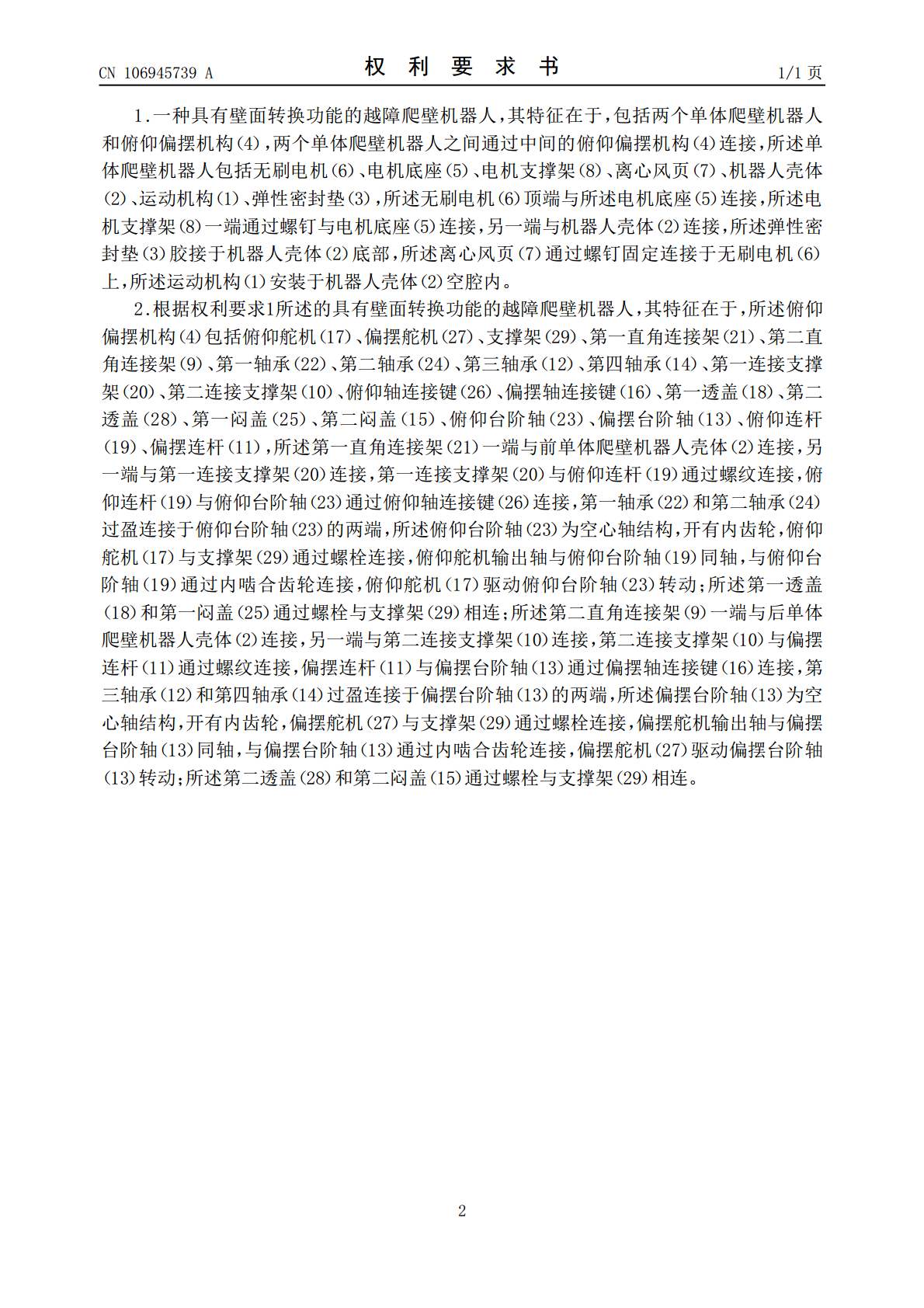
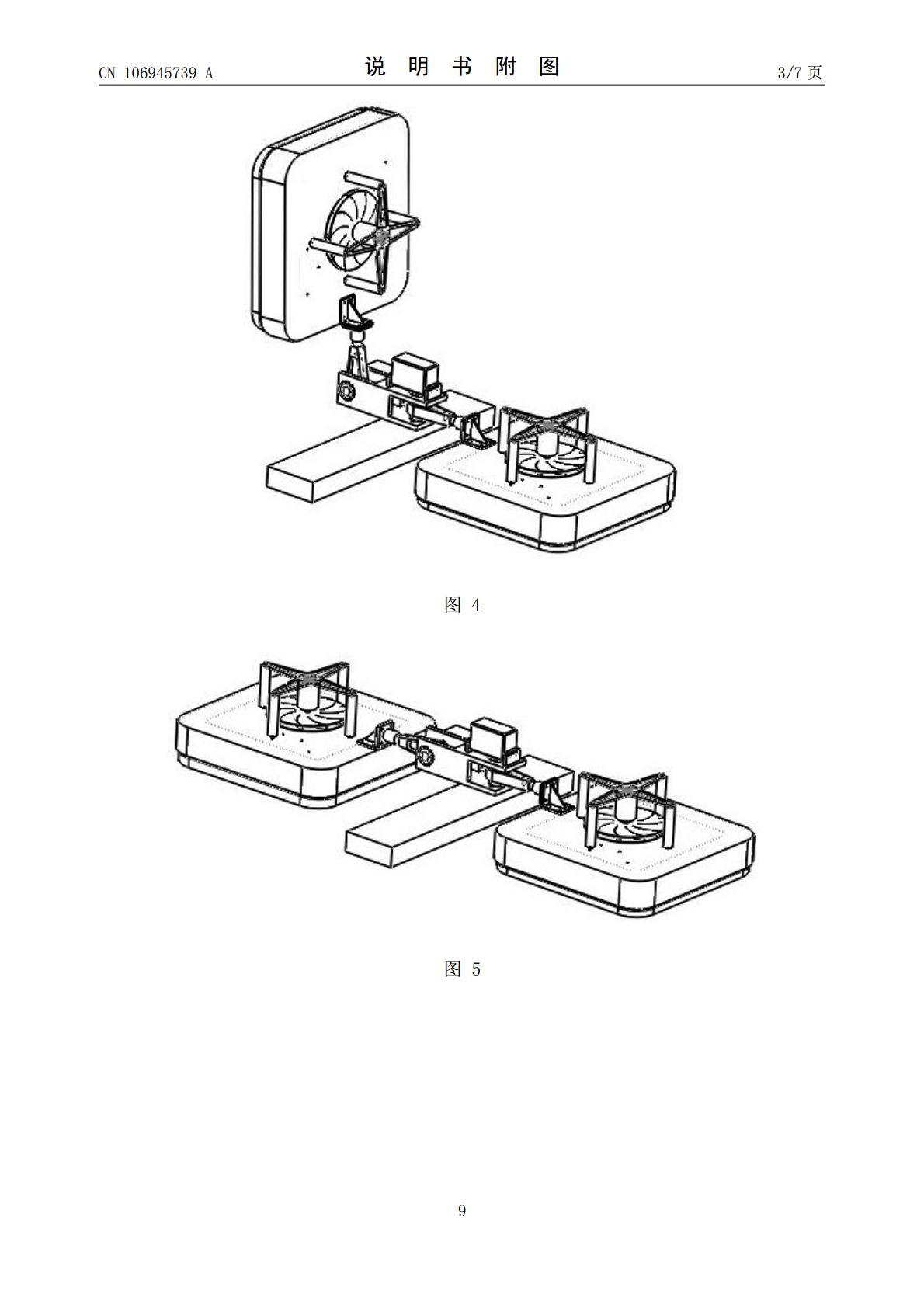
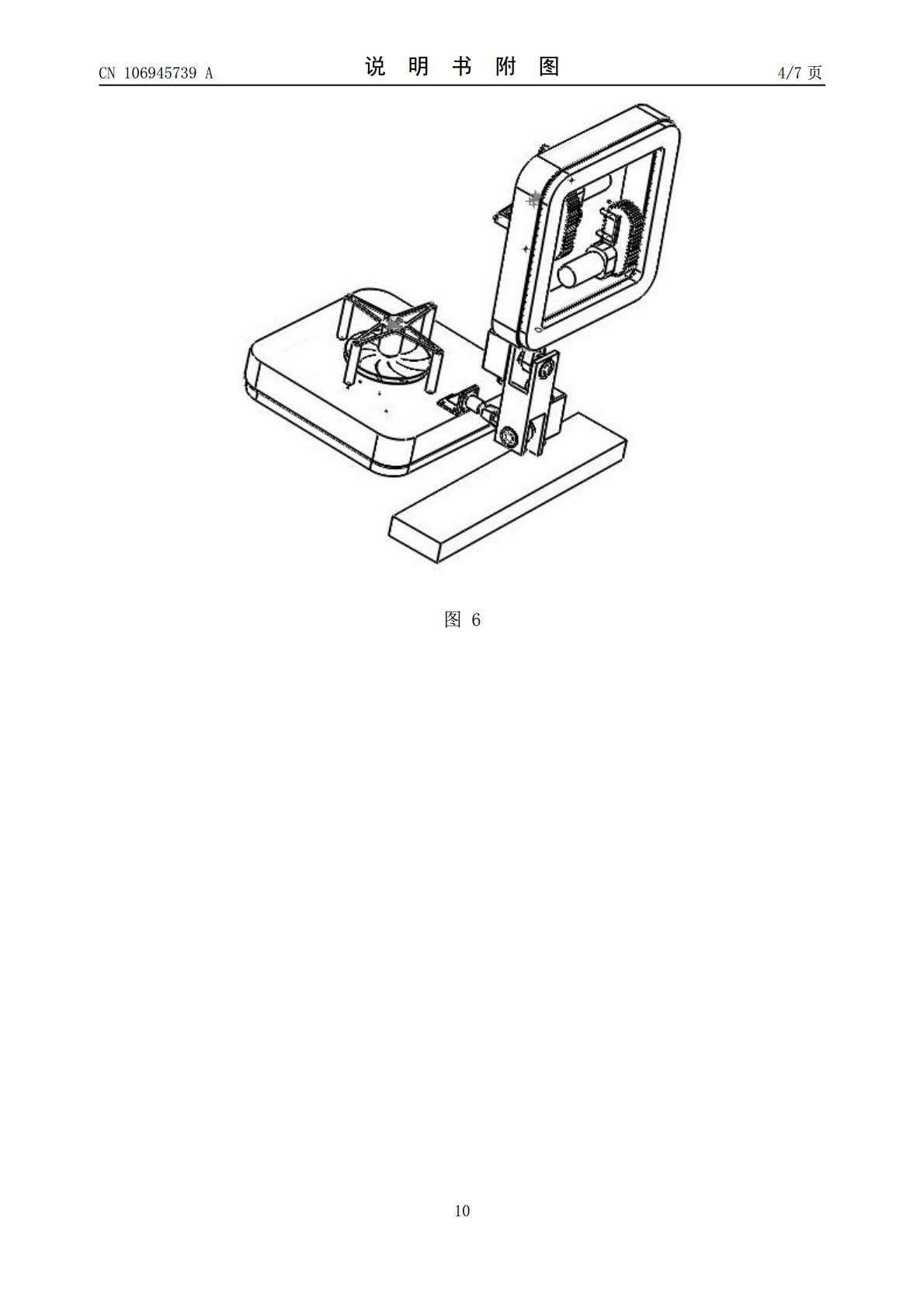
本发明公开了一种具有壁面转换功能的越障爬壁机器人,包括两个单体爬壁机器人和俯仰偏摆机构,两个单体爬壁机器人之间通过中间的俯仰偏摆机构连接,所述单体爬壁机器人包括无刷电机、电机底座、电机支撑架、离心风页、机器人壳体、运动机构、密封垫。无刷电机带动离心风页转动将机器人壳体内部的空气抽出,使机器人壳体内部形成负压,从而使机器人吸附在墙壁上。俯仰偏摆机构可以辅助机器人跨越障碍和转向。本发明双体爬壁机器人能够在墙壁表面灵活的移动,并且可以跨越墙壁上的沟槽和大的凸起障碍、完成在相邻壁面之间的转换,有效提高了爬壁机器人
一种具备壁面过渡功能的爬壁机器人.pdf
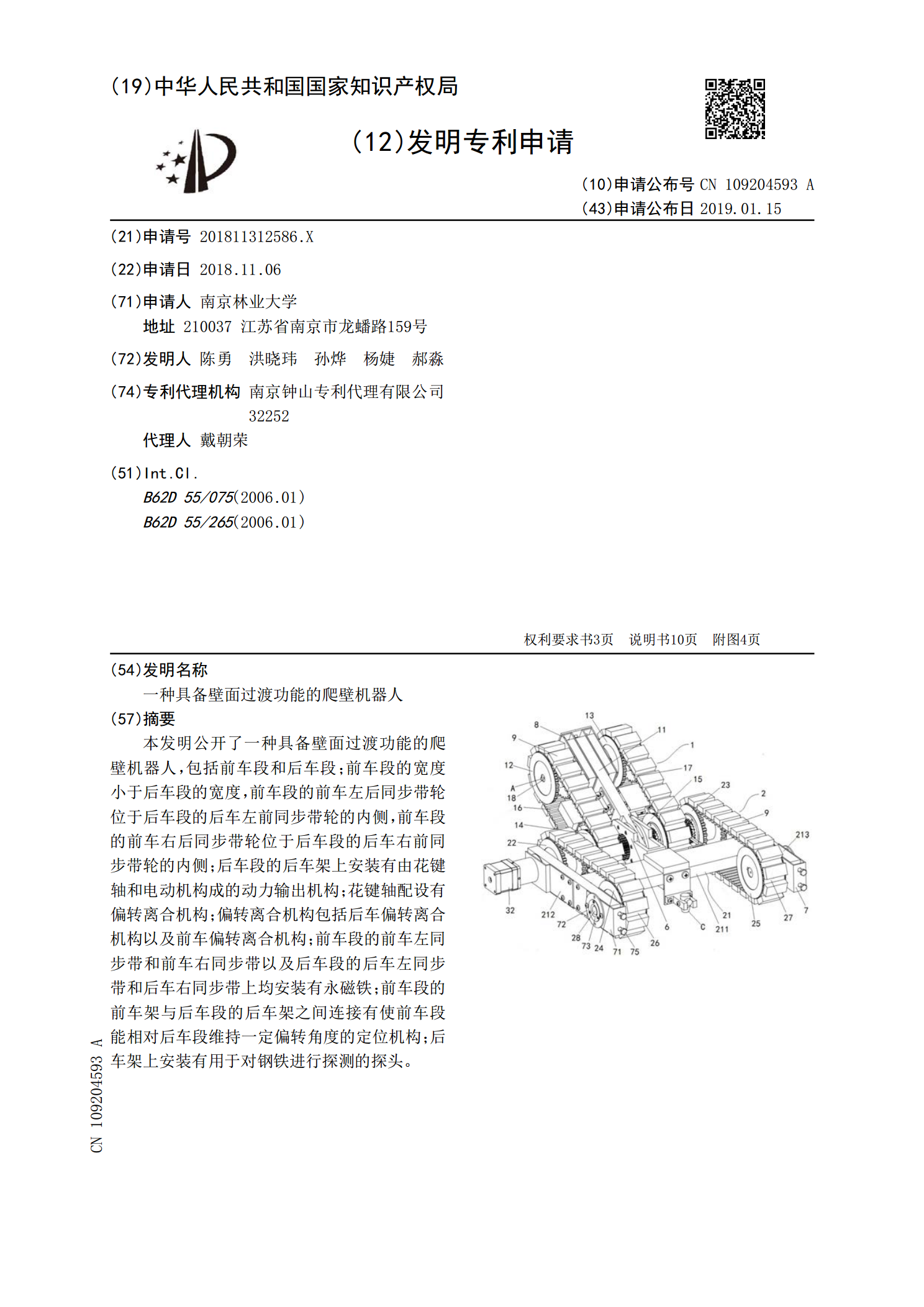
本发明公开了一种具备壁面过渡功能的爬壁机器人,包括前车段和后车段;前车段的宽度小于后车段的宽度,前车段的前车左后同步带轮位于后车段的后车左前同步带轮的内侧,前车段的前车右后同步带轮位于后车段的后车右前同步带轮的内侧;后车段的后车架上安装有由花键轴和电动机构成的动力输出机构;花键轴配设有偏转离合机构;偏转离合机构包括后车偏转离合机构以及前车偏转离合机构;前车段的前车左同步带和前车右同步带以及后车段的后车左同步带和后车右同步带上均安装有永磁铁;前车段的前车架与后车段的后车架之间连接有使前车段能相对后车段维持一
一种具有壁面自适应能力的爬壁机器人用轮式越障机构.pdf
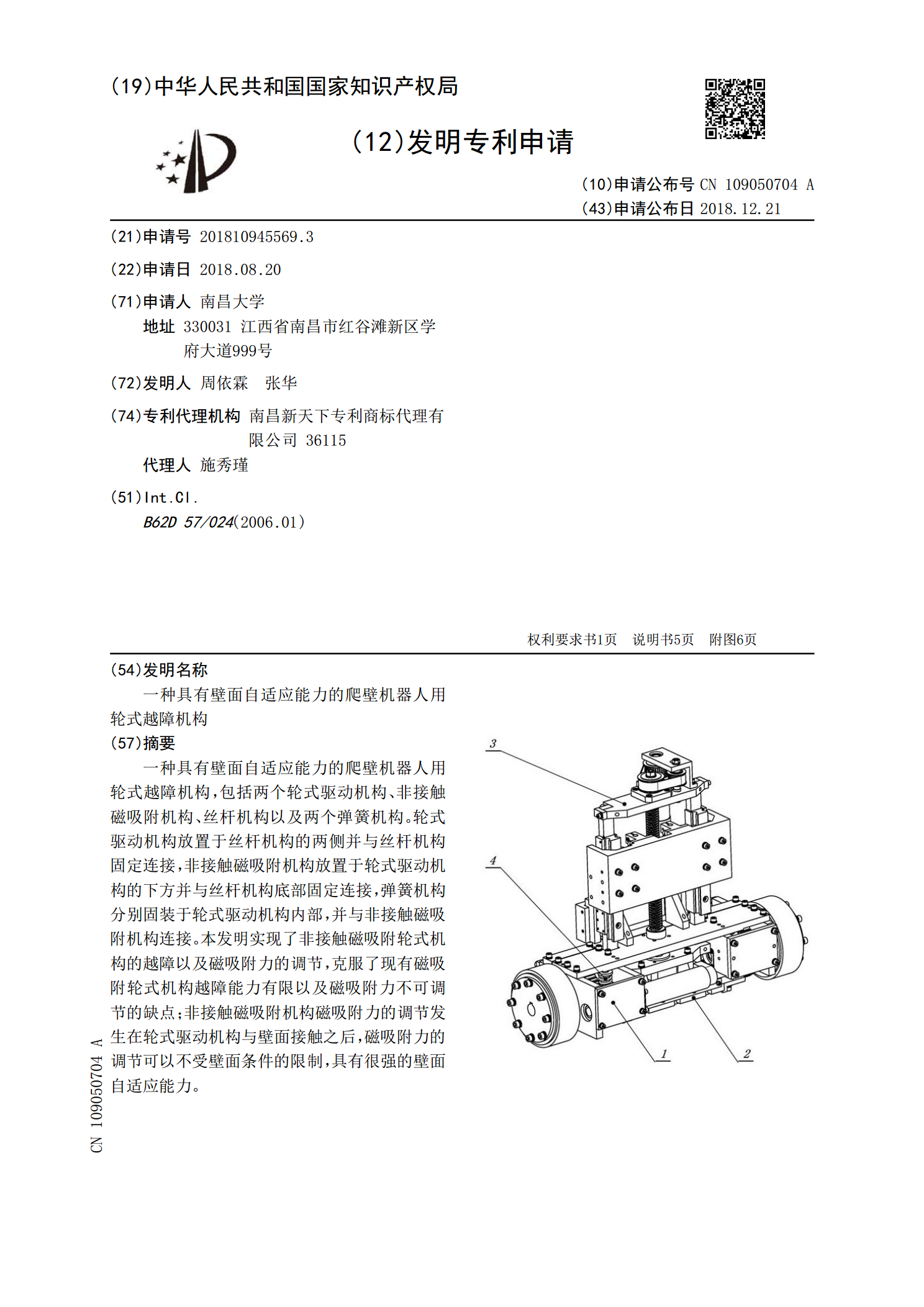
一种具有壁面自适应能力的爬壁机器人用轮式越障机构,包括两个轮式驱动机构、非接触磁吸附机构、丝杆机构以及两个弹簧机构。轮式驱动机构放置于丝杆机构的两侧并与丝杆机构固定连接,非接触磁吸附机构放置于轮式驱动机构的下方并与丝杆机构底部固定连接,弹簧机构分别固装于轮式驱动机构内部,并与非接触磁吸附机构连接。本发明实现了非接触磁吸附轮式机构的越障以及磁吸附力的调节,克服了现有磁吸附轮式机构越障能力有限以及磁吸附力不可调节的缺点;非接触磁吸附机构磁吸附力的调节发生在轮式驱动机构与壁面接触之后,磁吸附力的调节可以不受壁面
一种越障爬壁机器人.pdf
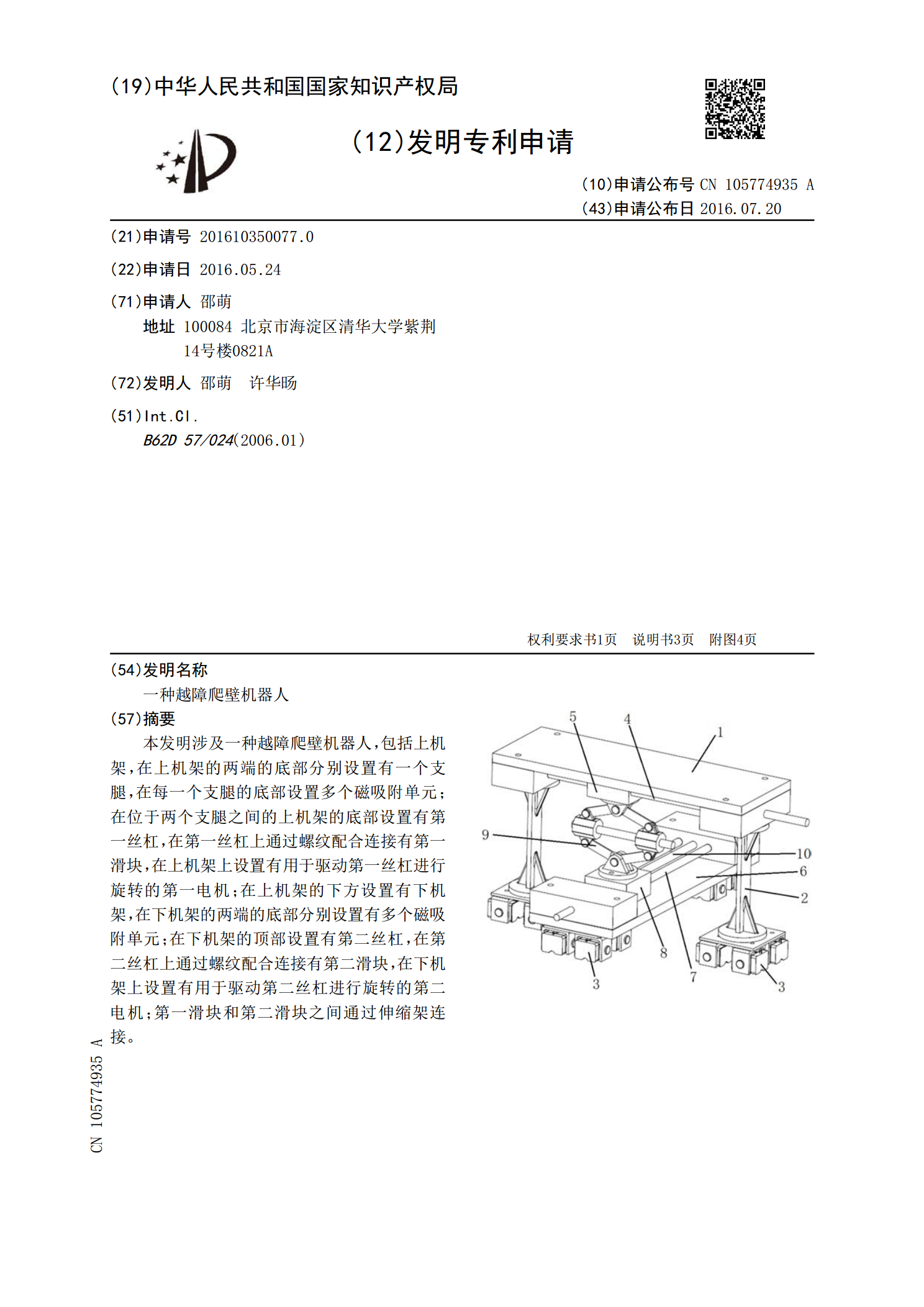
本发明涉及一种越障爬壁机器人,包括上机架,在上机架的两端的底部分别设置有一个支腿,在每一个支腿的底部设置多个磁吸附单元;在位于两个支腿之间的上机架的底部设置有第一丝杠,在第一丝杠上通过螺纹配合连接有第一滑块,在上机架上设置有用于驱动第一丝杠进行旋转的第一电机;在上机架的下方设置有下机架,在下机架的两端的底部分别设置有多个磁吸附单元;在下机架的顶部设置有第二丝杠,在第二丝杠上通过螺纹配合连接有第二滑块,在下机架上设置有用于驱动第二丝杠进行旋转的第二电机;第一滑块和第二滑块之间通过伸缩架连接。
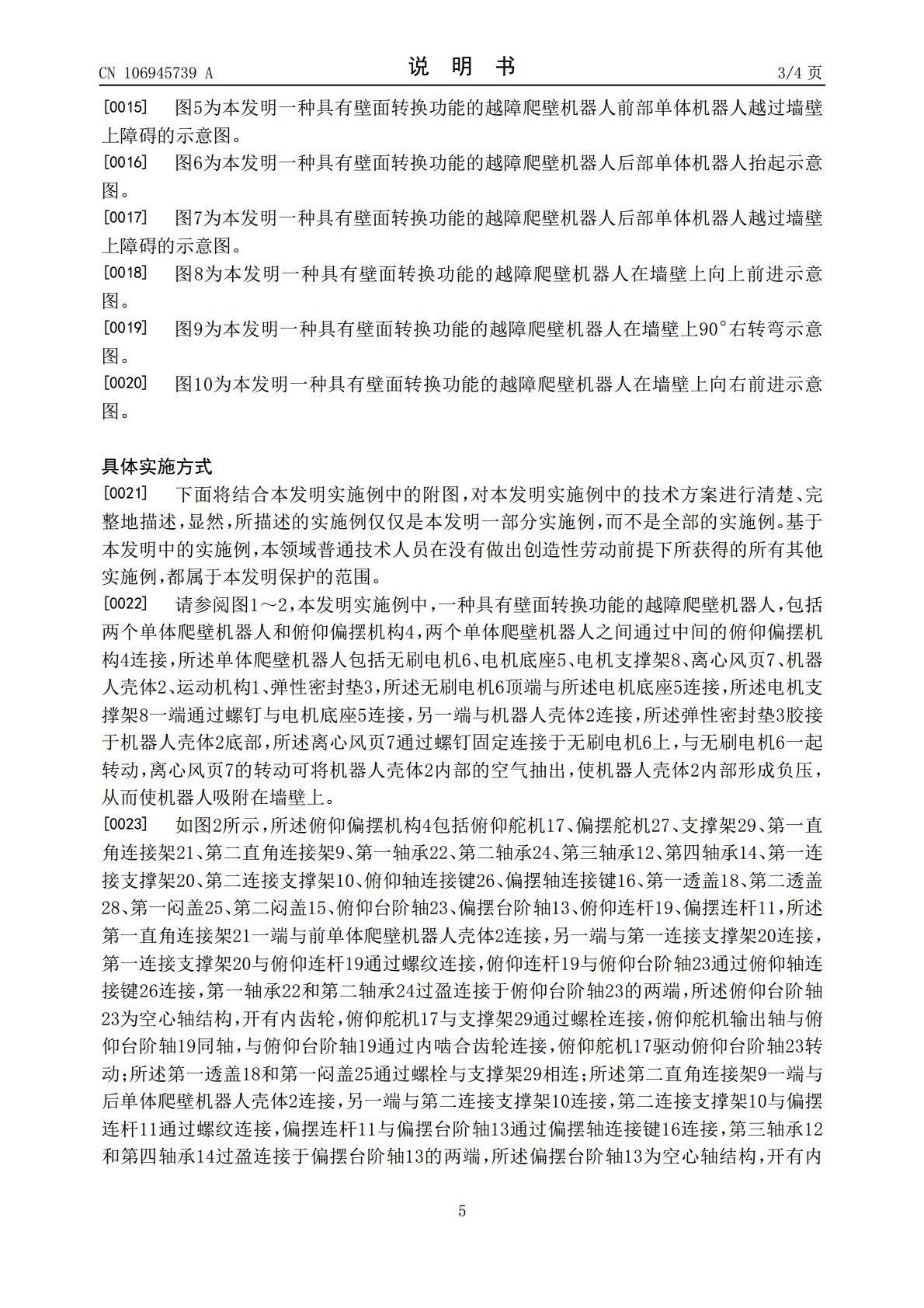
一种越障爬壁机器人.pdf
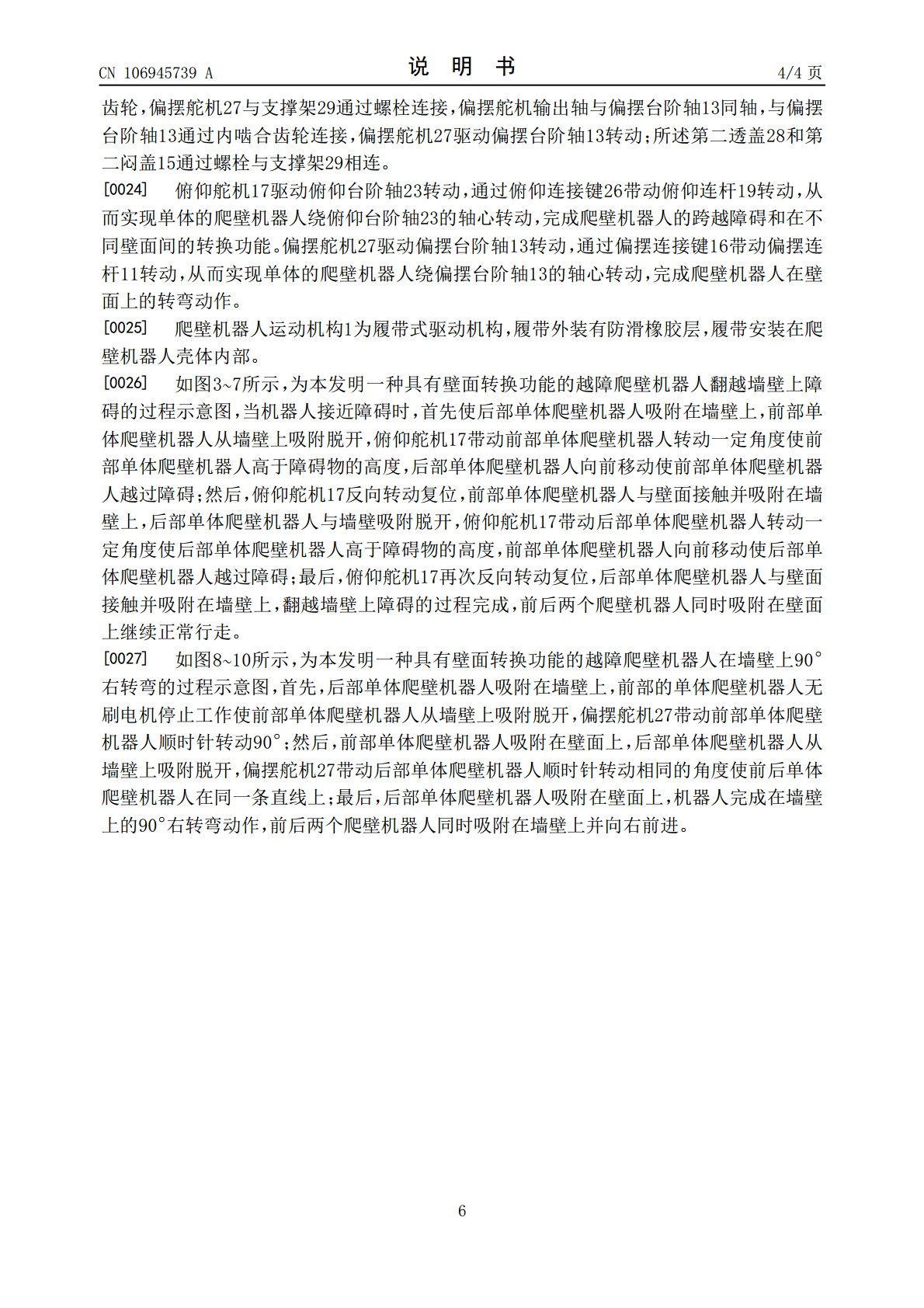
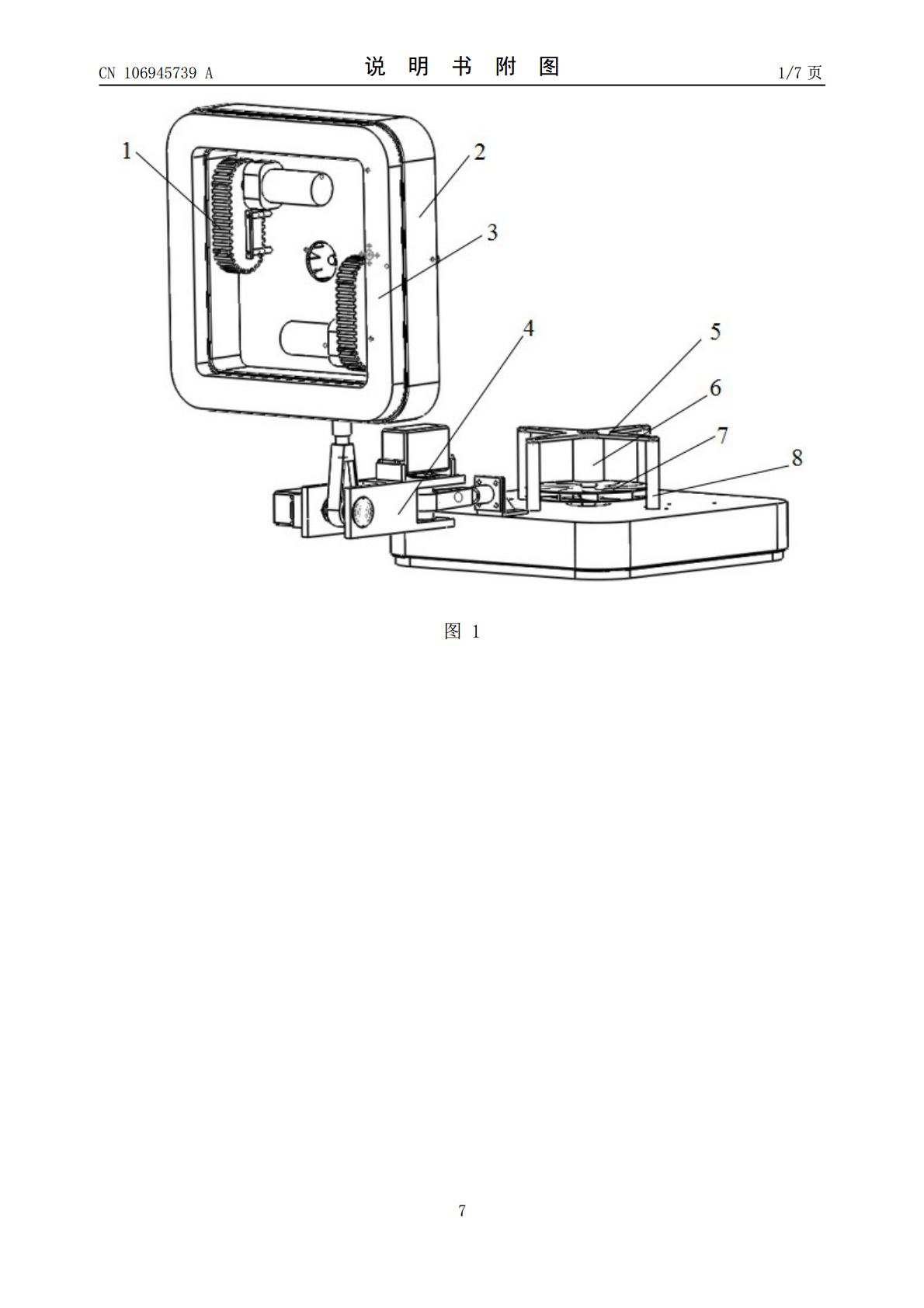
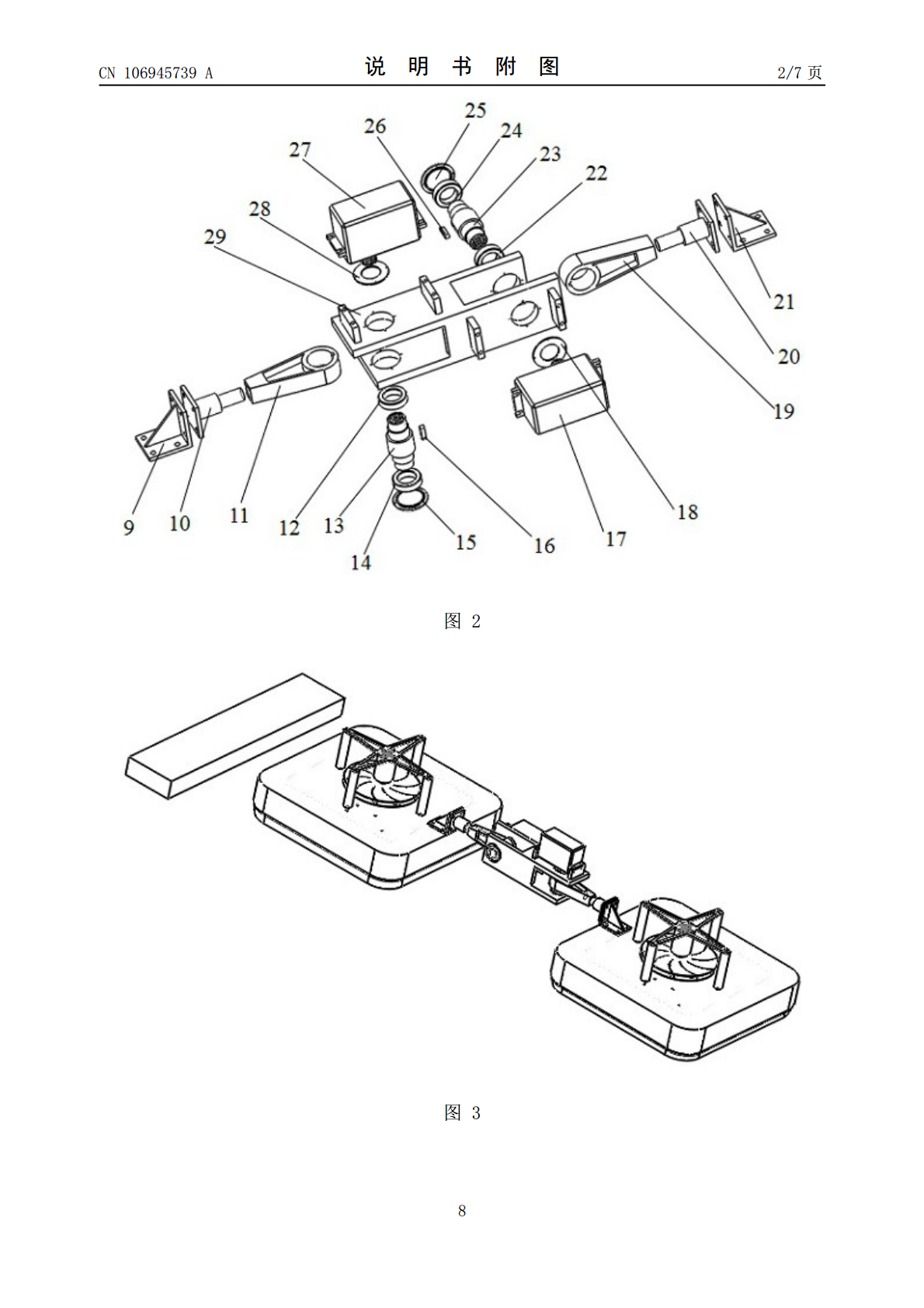
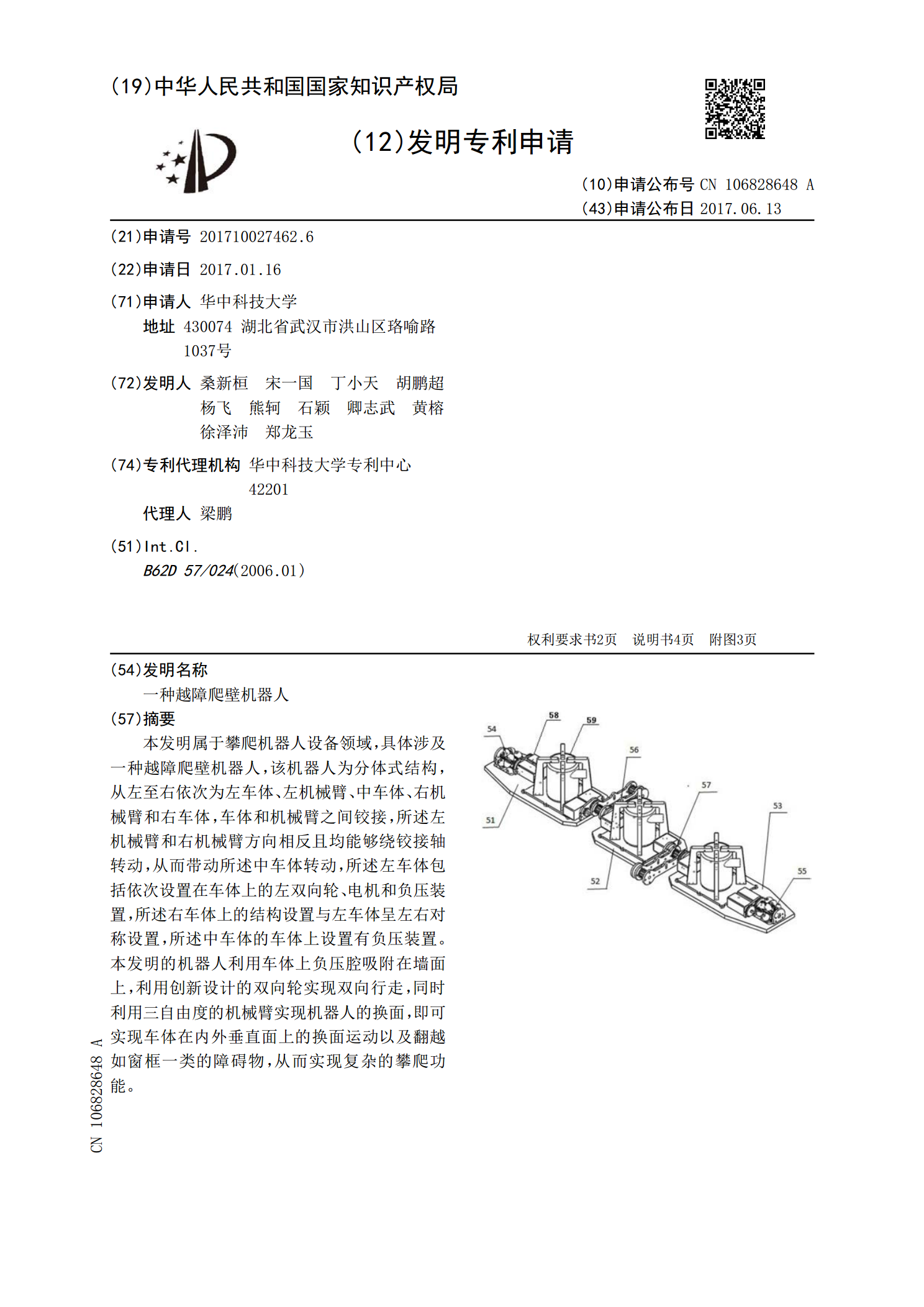
本发明属于攀爬机器人设备领域,具体涉及一种越障爬壁机器人,该机器人为分体式结构,从左至右依次为左车体、左机械臂、中车体、右机械臂和右车体,车体和机械臂之间铰接,所述左机械臂和右机械臂方向相反且均能够绕铰接轴转动,从而带动所述中车体转动,所述左车体包括依次设置在车体上的左双向轮、电机和负压装置,所述右车体上的结构设置与左车体呈左右对称设置,所述中车体的车体上设置有负压装置。本发明的机器人利用车体上负压腔吸附在墙面上,利用创新设计的双向轮实现双向行走,同时利用三自由度的机械臂实现机器人的换面,即可实现车体在内