
一种爬壁机器人行走机构.pdf

雨星****萌娃


1/5
2/5
3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种爬壁机器人行走机构.pdf
本发明公开了一种爬壁机器人行走机构,包括行走机构和驱动行走机构运动的行星齿轮机构,所述行走机构及行星齿轮机构设置在支架上;行星齿轮机构包括外齿圈、太阳齿轮、行星齿轮、行星架以及电机;所述外齿圈固结在支架内;太阳齿轮为驱动轮,与电机连接;所述行星齿轮有三个,分别安装在行星架的三个轴上;行走机构包括五个吸附装置,其中三个吸附装置通过连接杆及脚架均匀设置在支架的外围;另外两个吸附装置通过连杆安装在行星架的两个轴的通孔内;当爬壁机器人行走时安装在支架上的三个吸附装置与安装在行星架上的两个吸附装置相互交替吸附。本行
一种爪刺式爬壁机器人的行走机构.pdf
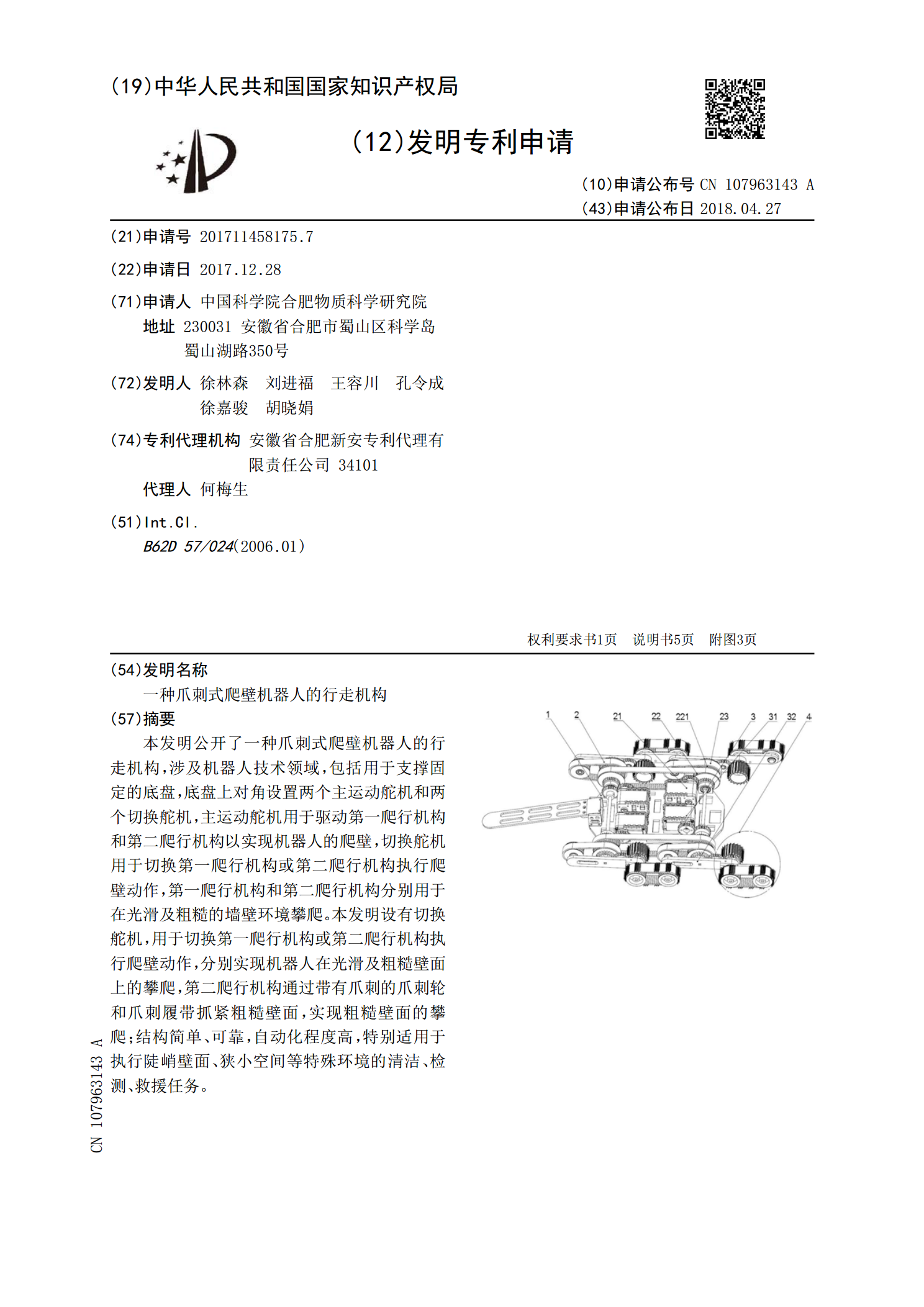
本发明公开了一种爪刺式爬壁机器人的行走机构,涉及机器人技术领域,包括用于支撑固定的底盘,底盘上对角设置两个主运动舵机和两个切换舵机,主运动舵机用于驱动第一爬行机构和第二爬行机构以实现机器人的爬壁,切换舵机用于切换第一爬行机构或第二爬行机构执行爬壁动作,第一爬行机构和第二爬行机构分别用于在光滑及粗糙的墙壁环境攀爬。本发明设有切换舵机,用于切换第一爬行机构或第二爬行机构执行爬壁动作,分别实现机器人在光滑及粗糙壁面上的攀爬,第二爬行机构通过带有爪刺的爪刺轮和爪刺履带抓紧粗糙壁面,实现粗糙壁面的攀爬;结构简单、可
一种履带式电磁吸附爬壁机器人行走机构.pdf
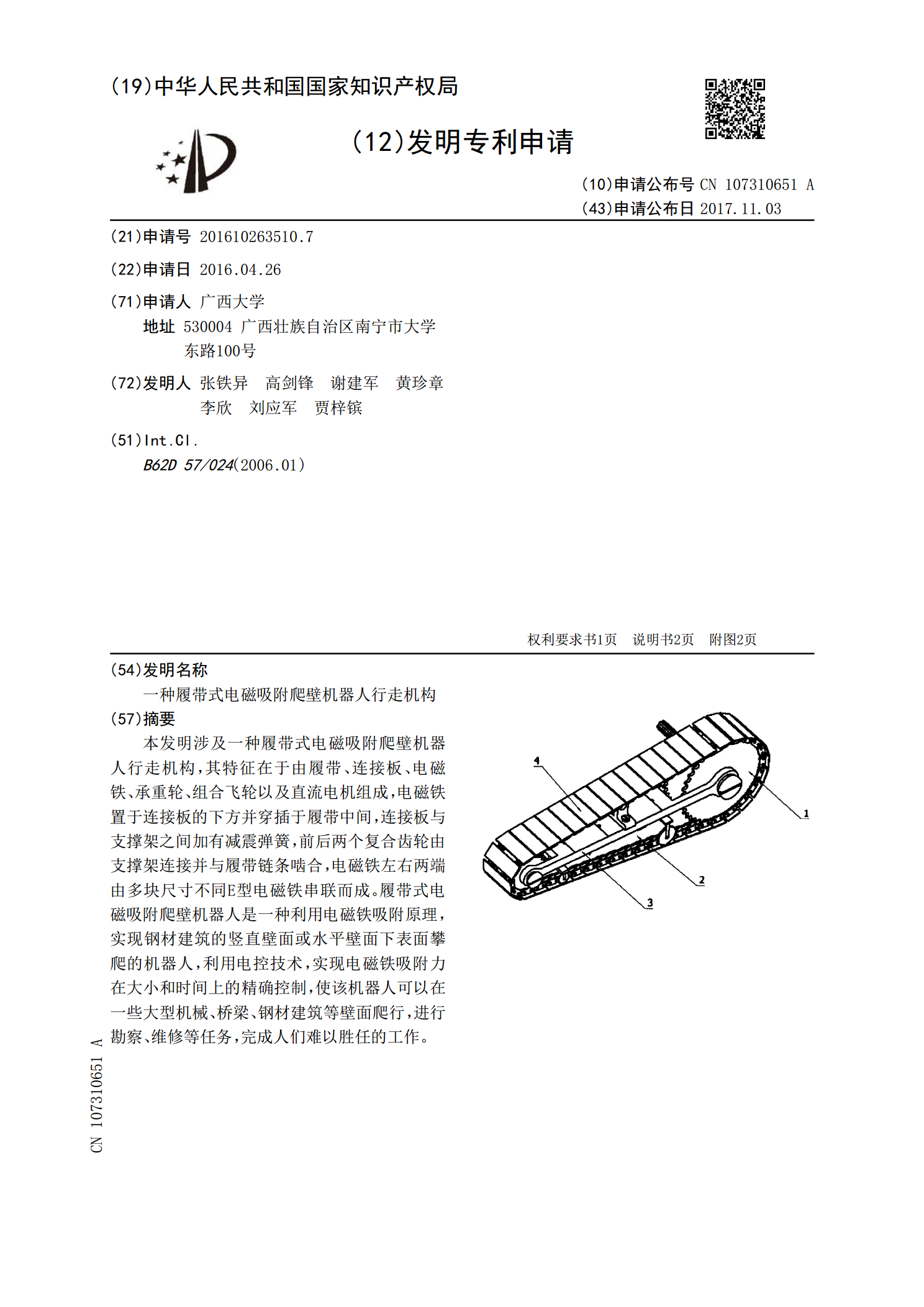
本发明涉及一种履带式电磁吸附爬壁机器人行走机构,其特征在于由履带、连接板、电磁铁、承重轮、组合飞轮以及直流电机组成,电磁铁置于连接板的下方并穿插于履带中间,连接板与支撑架之间加有减震弹簧,前后两个复合齿轮由支撑架连接并与履带链条啮合,电磁铁左右两端由多块尺寸不同E型电磁铁串联而成。履带式电磁吸附爬壁机器人是一种利用电磁铁吸附原理,实现钢材建筑的竖直壁面或水平壁面下表面攀爬的机器人,利用电控技术,实现电磁铁吸附力在大小和时间上的精确控制,使该机器人可以在一些大型机械、桥梁、钢材建筑等壁面爬行,进行勘察、维修
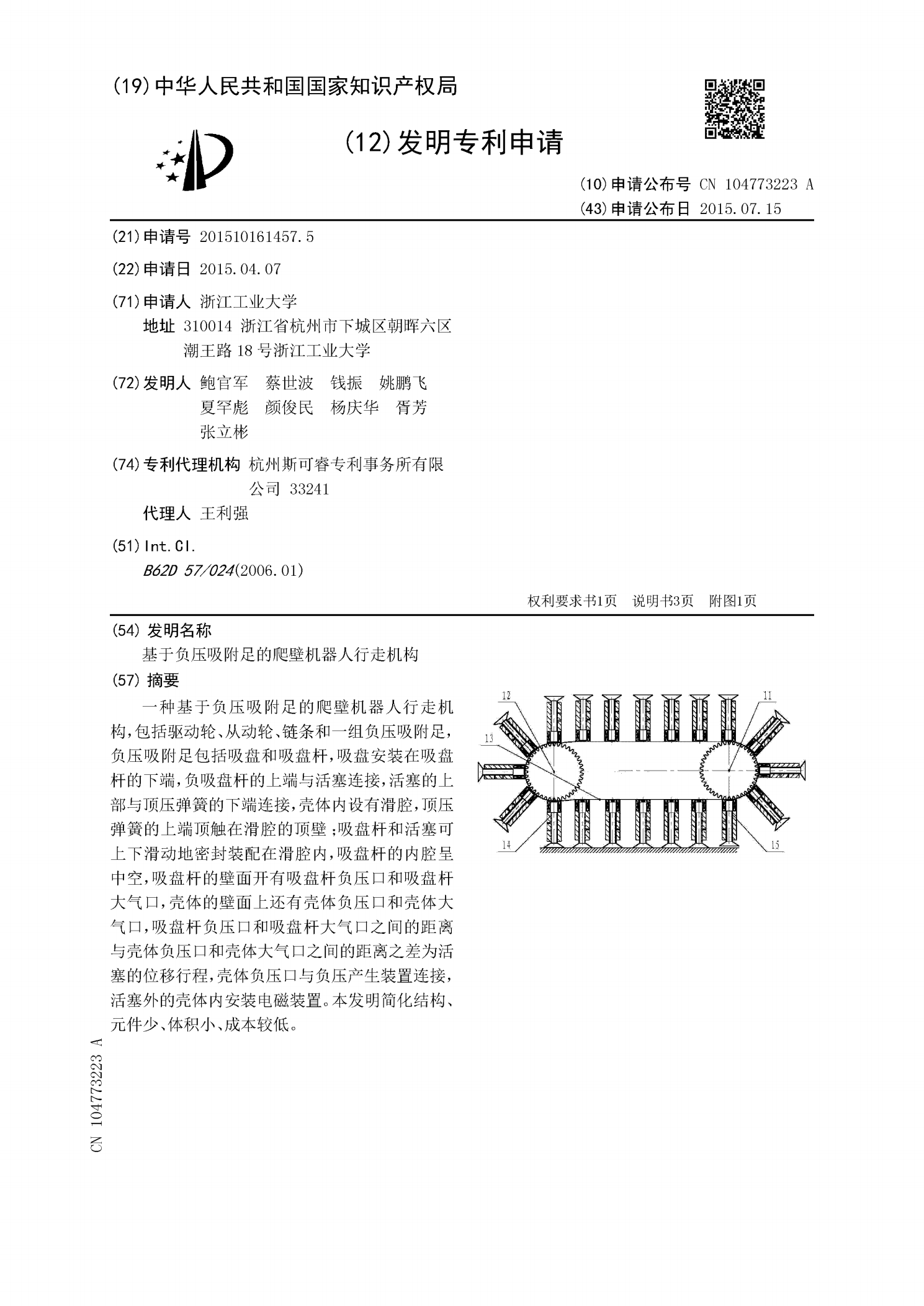
基于负压吸附足的爬壁机器人行走机构.pdf
一种基于负压吸附足的爬壁机器人行走机构,包括驱动轮、从动轮、链条和一组负压吸附足,负压吸附足包括吸盘和吸盘杆,吸盘安装在吸盘杆的下端,负吸盘杆的上端与活塞连接,活塞的上部与顶压弹簧的下端连接,壳体内设有滑腔,顶压弹簧的上端顶触在滑腔的顶壁;吸盘杆和活塞可上下滑动地密封装配在滑腔内,吸盘杆的内腔呈中空,吸盘杆的壁面开有吸盘杆负压口和吸盘杆大气口,壳体的壁面上还有壳体负压口和壳体大气口,吸盘杆负压口和吸盘杆大气口之间的距离与壳体负压口和壳体大气口之间的距离之差为活塞的位移行程,壳体负压口与负压产生装置连接,活
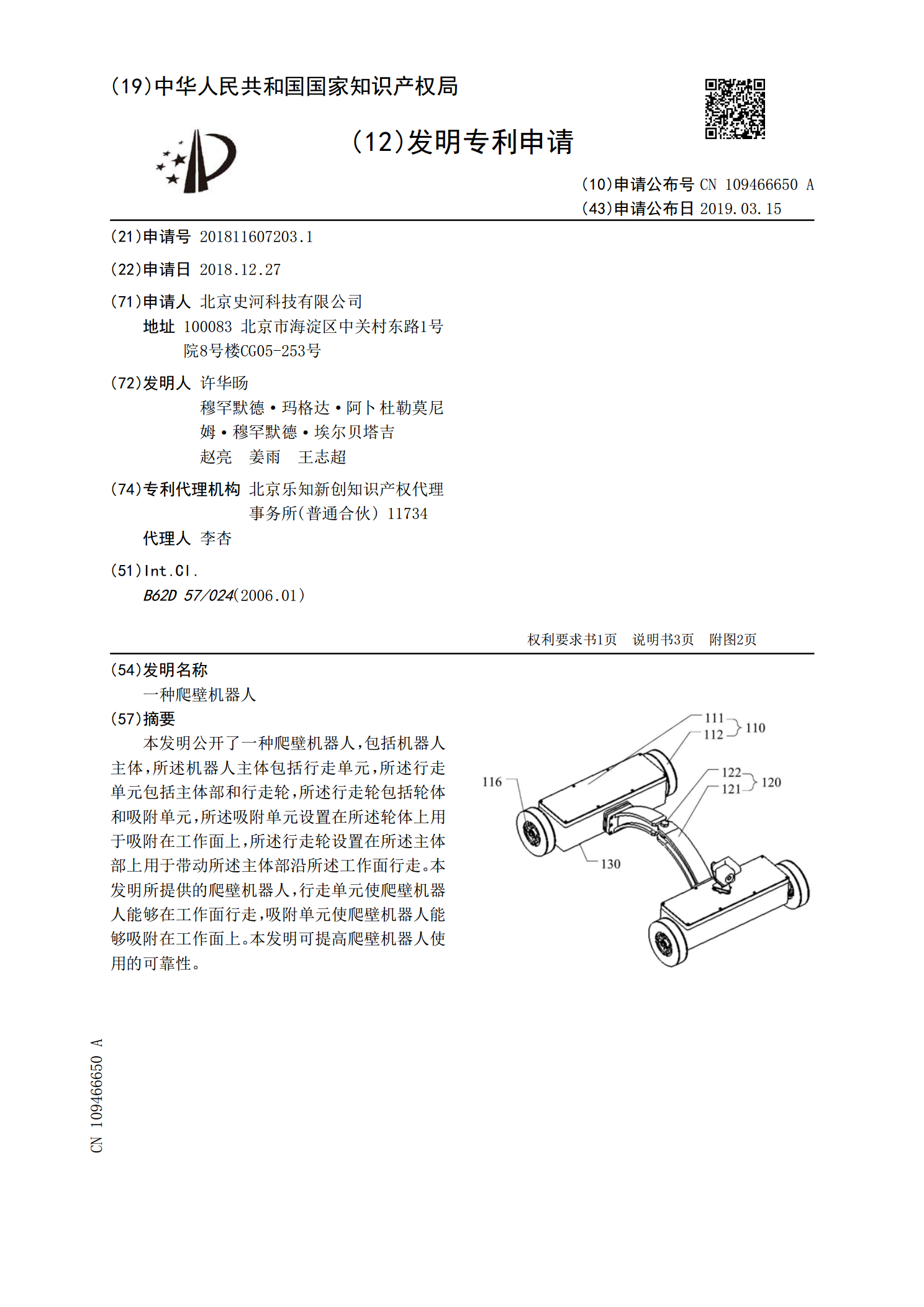
一种爬壁机器人.pdf
本发明公开了一种爬壁机器人,包括机器人主体,所述机器人主体包括行走单元,所述行走单元包括主体部和行走轮,所述行走轮包括轮体和吸附单元,所述吸附单元设置在所述轮体上用于吸附在工作面上,所述行走轮设置在所述主体部上用于带动所述主体部沿所述工作面行走。本发明所提供的爬壁机器人,行走单元使爬壁机器人能够在工作面行走,吸附单元使爬壁机器人能够吸附在工作面上。本发明可提高爬壁机器人使用的可靠性。