
一种用于隧道衬砌模板台车的液压行走机构及控制方法.pdf

霞英****娘子

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于隧道衬砌模板台车的液压行走机构及控制方法.pdf
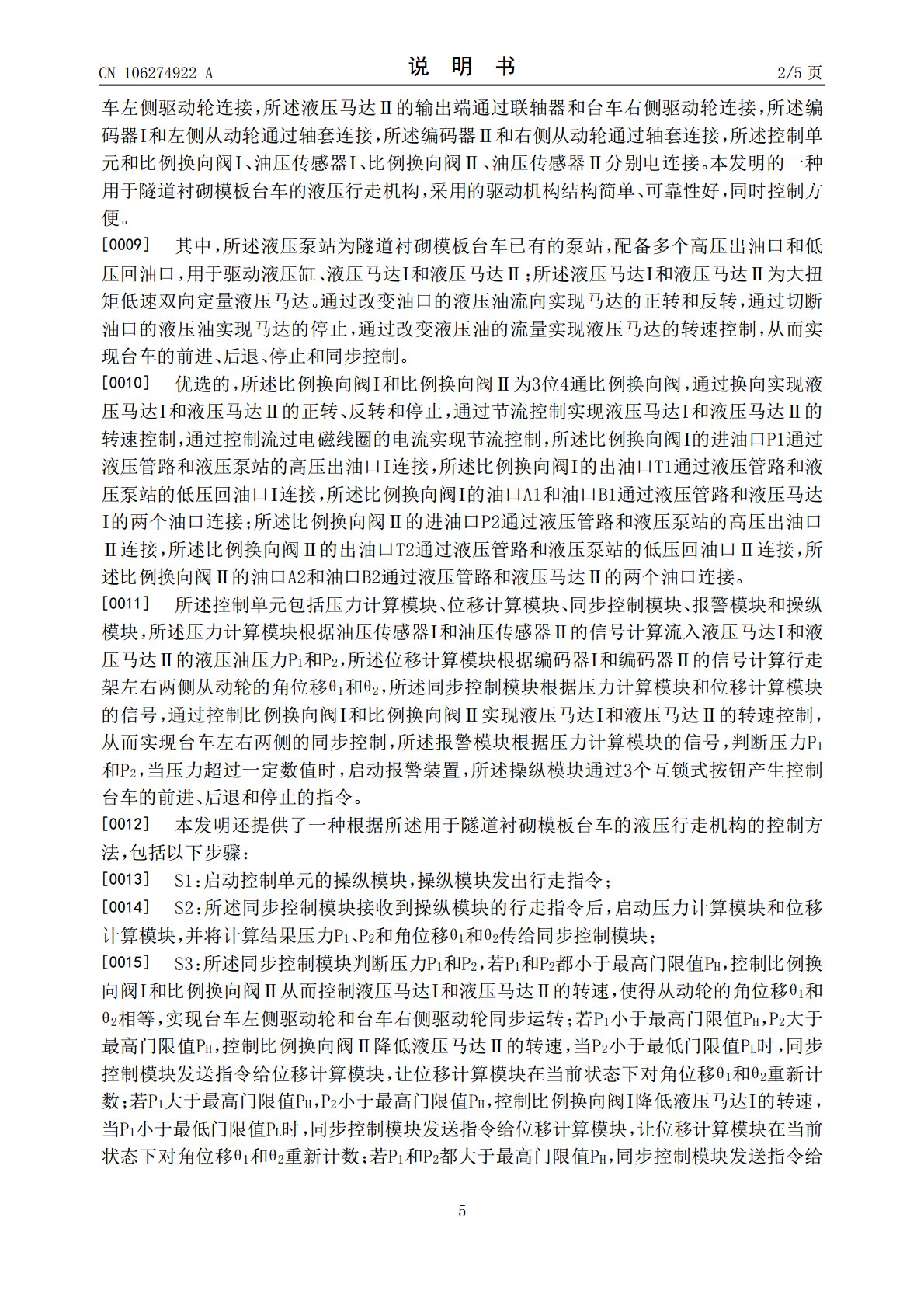
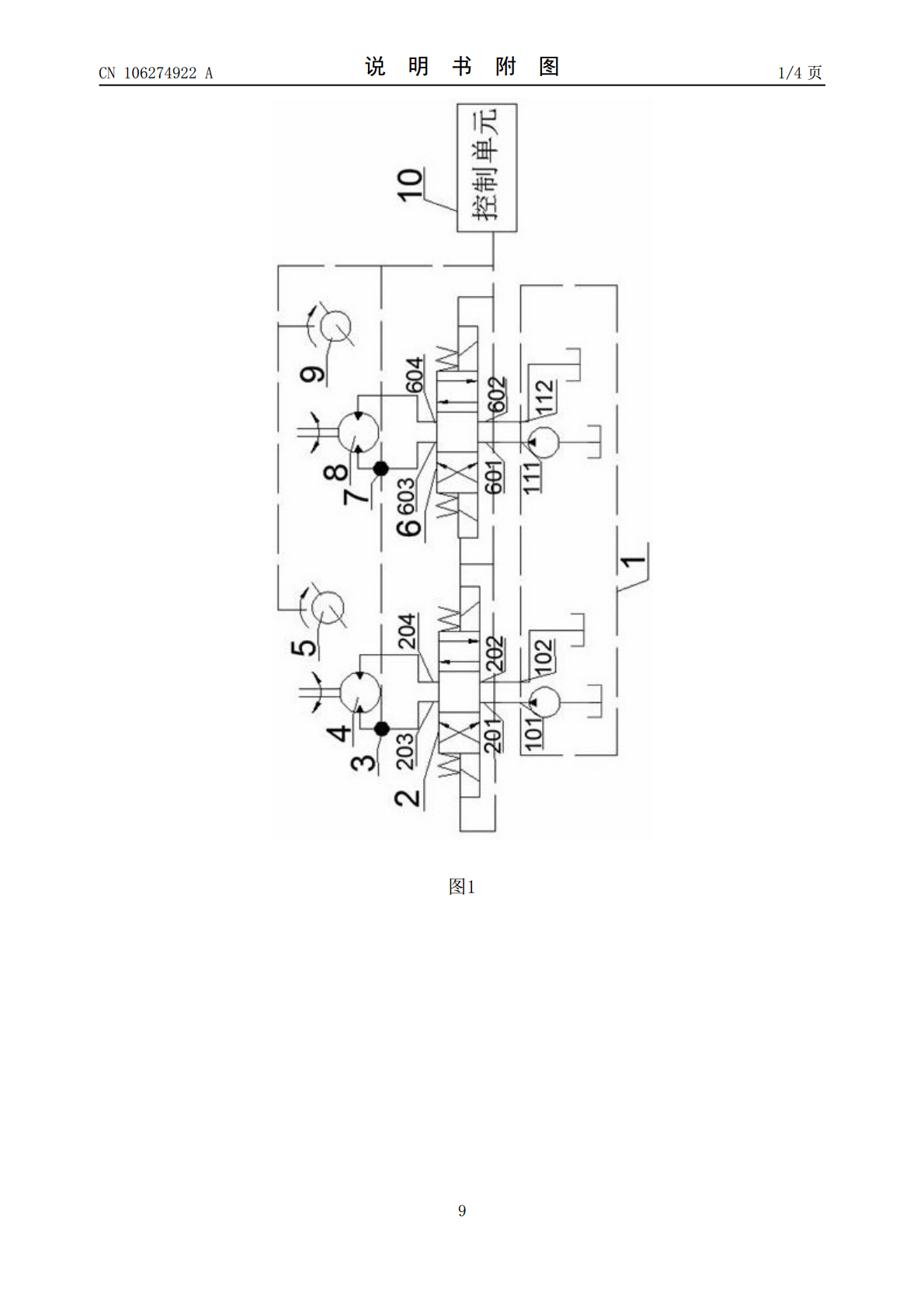
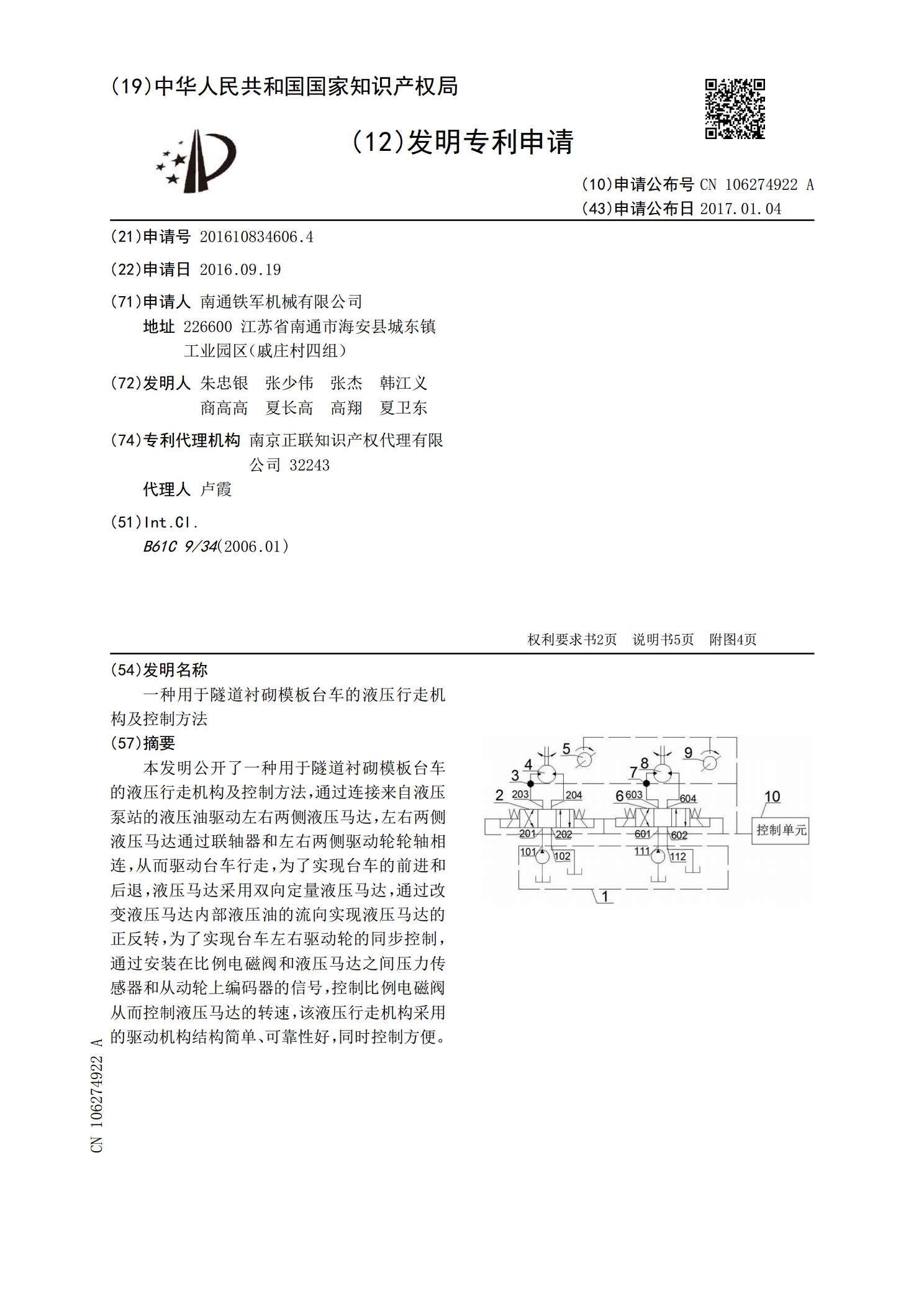
本发明公开了一种用于隧道衬砌模板台车的液压行走机构及控制方法,通过连接来自液压泵站的液压油驱动左右两侧液压马达,左右两侧液压马达通过联轴器和左右两侧驱动轮轮轴相连,从而驱动台车行走,为了实现台车的前进和后退,液压马达采用双向定量液压马达,通过改变液压马达内部液压油的流向实现液压马达的正反转,为了实现台车左右驱动轮的同步控制,通过安装在比例电磁阀和液压马达之间压力传感器和从动轮上编码器的信号,控制比例电磁阀从而控制液压马达的转速,该液压行走机构采用的驱动机构结构简单、可靠性好,同时控制方便。
一种用于隧道衬砌模板台车的行走控制装置及控制方法.pdf
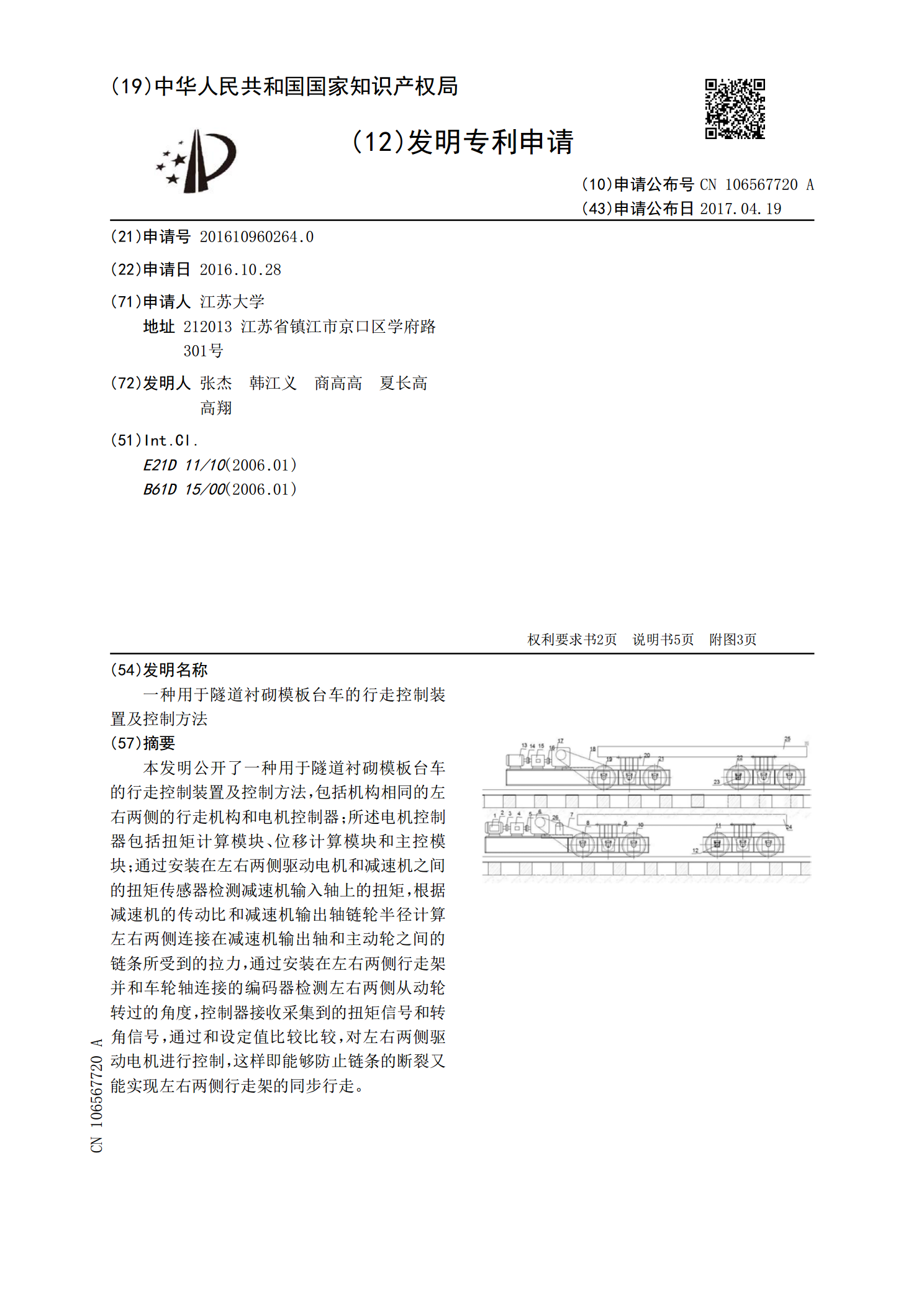
本发明公开了一种用于隧道衬砌模板台车的行走控制装置及控制方法,包括机构相同的左右两侧的行走机构和电机控制器;所述电机控制器包括扭矩计算模块、位移计算模块和主控模块;通过安装在左右两侧驱动电机和减速机之间的扭矩传感器检测减速机输入轴上的扭矩,根据减速机的传动比和减速机输出轴链轮半径计算左右两侧连接在减速机输出轴和主动轮之间的链条所受到的拉力,通过安装在左右两侧行走架并和车轮轴连接的编码器检测左右两侧从动轮转过的角度,控制器接收采集到的扭矩信号和转角信号,通过和设定值比较比较,对左右两侧驱动电机进行控制,这样
黄土隧道一次衬砌液压模板台车.pdf
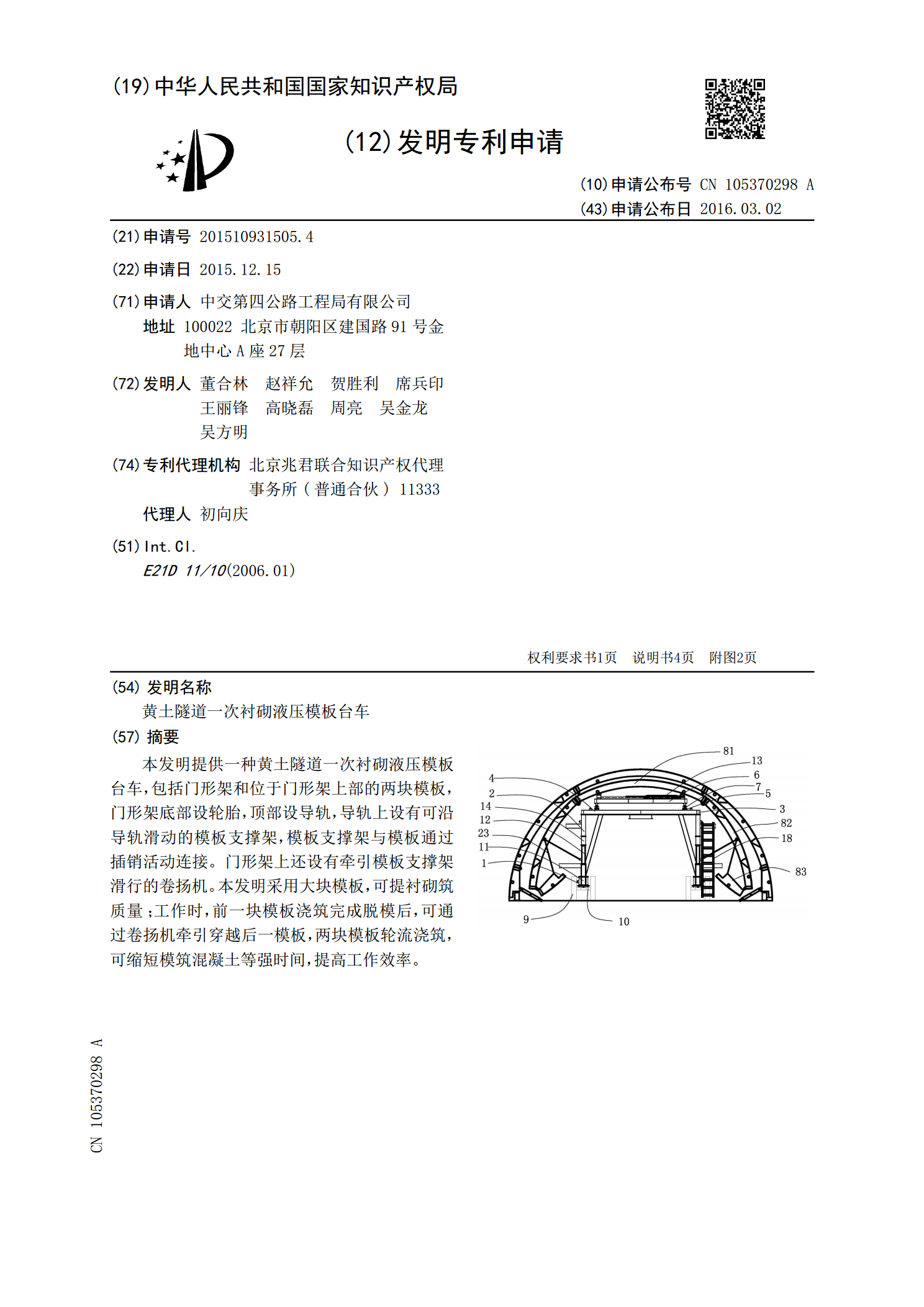
本发明提供一种黄土隧道一次衬砌液压模板台车,包括门形架和位于门形架上部的两块模板,门形架底部设轮胎,顶部设导轨,导轨上设有可沿导轨滑动的模板支撑架,模板支撑架与模板通过插销活动连接。门形架上还设有牵引模板支撑架滑行的卷扬机。本发明采用大块模板,可提衬砌筑质量;工作时,前一块模板浇筑完成脱模后,可通过卷扬机牵引穿越后一模板,两块模板轮流浇筑,可缩短模筑混凝土等强时间,提高工作效率。
一种隧道衬砌模板台车.pdf
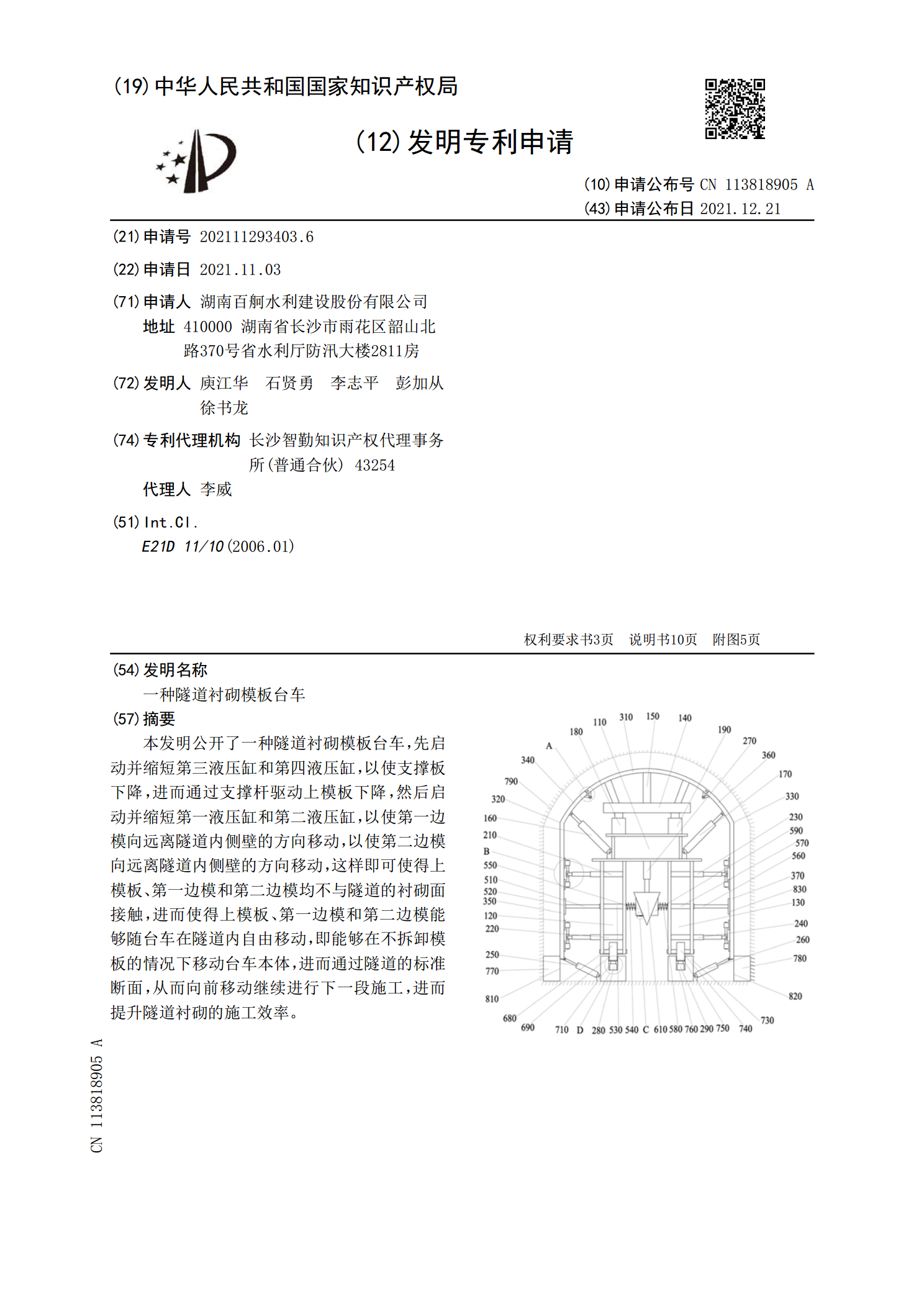
本发明公开了一种隧道衬砌模板台车,先启动并缩短第三液压缸和第四液压缸,以使支撑板下降,进而通过支撑杆驱动上模板下降,然后启动并缩短第一液压缸和第二液压缸,以使第一边模向远离隧道内侧壁的方向移动,以使第二边模向远离隧道内侧壁的方向移动,这样即可使得上模板、第一边模和第二边模均不与隧道的衬砌面接触,进而使得上模板、第一边模和第二边模能够随台车在隧道内自由移动,即能够在不拆卸模板的情况下移动台车本体,进而通过隧道的标准断面,从而向前移动继续进行下一段施工,进而提升隧道衬砌的施工效率。

隧道液压衬砌台车安全操作规程.docx
隧道液压衬砌台车安全操作规程-1--2-隧道液压衬砌台车安全操作章程1.台车工作之前应该做好台车的检查和接地工作检查电源相序和漏电保护装置避免台车漏电和电机反转造成逆向行驶;2.检查钢轨间距必须符合要求夹板和枕木应完好台车前进方向无危岩和障碍物机械制动系统完好在确认各部完好无误时再鸣号前进;3.台车行走时应有专人指挥台车前后左右顶部要设防护岗操作人员要服从指挥严守岗位;4.实行挂牌制打好前后眼木准备充分后由指挥人员以正确手势或鸣哨为准开动前回铃示警穿行模板前必须停车检查各部有无障碍物确认无