
一种玻璃幕墙清洁机器人的折叠式攀爬装置.pdf

如灵****姐姐

1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种玻璃幕墙清洁机器人的折叠式攀爬装置.pdf
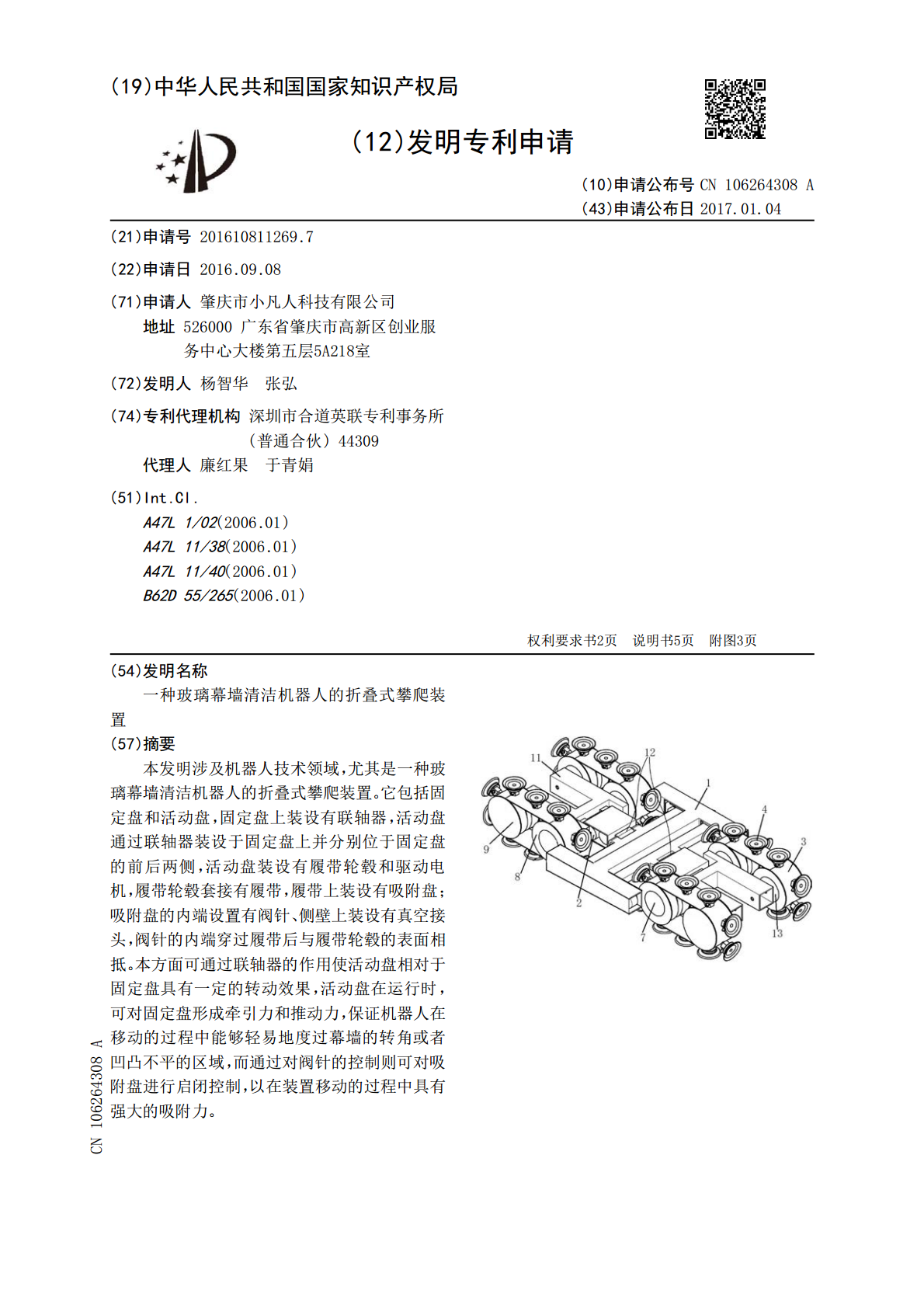
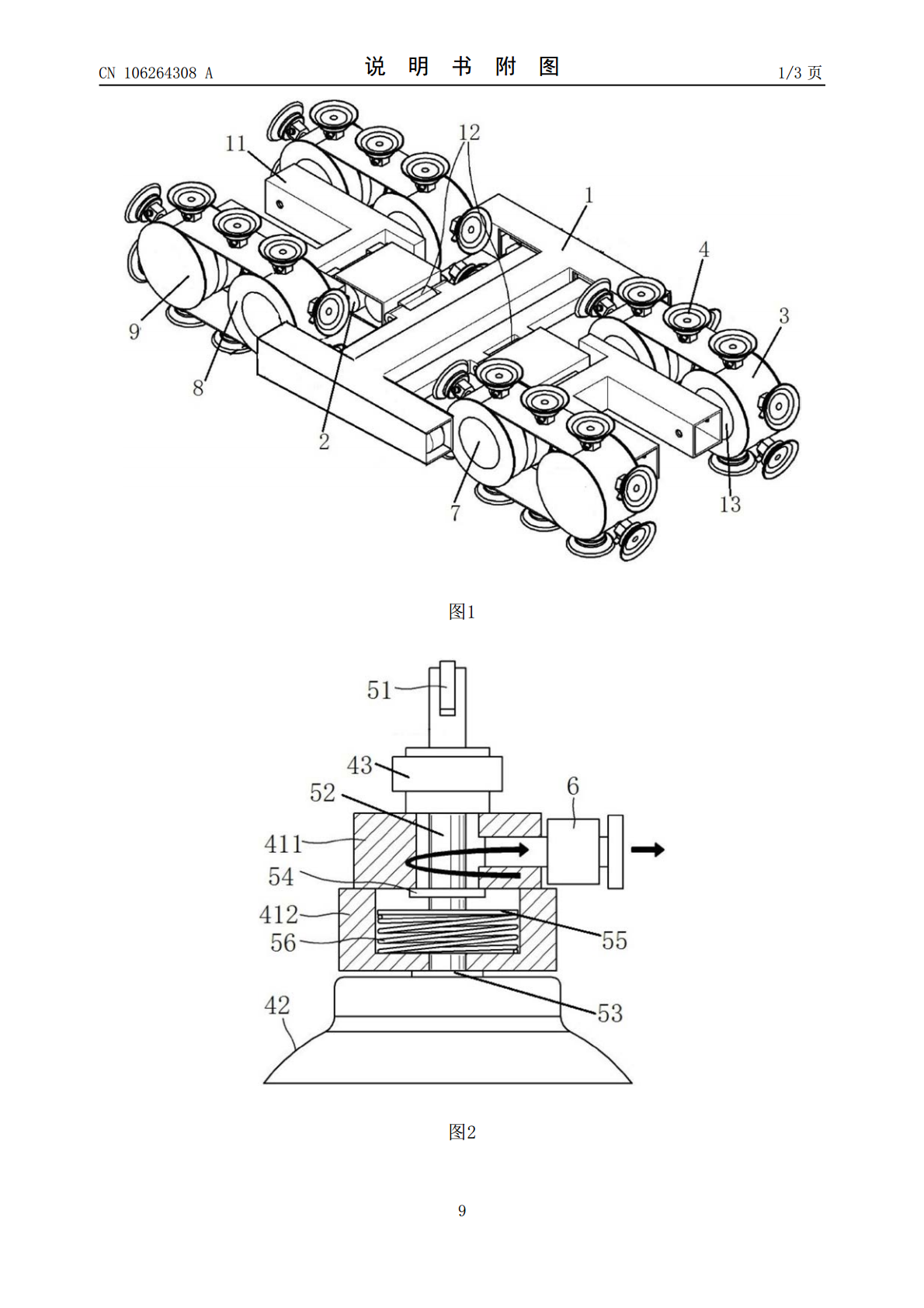
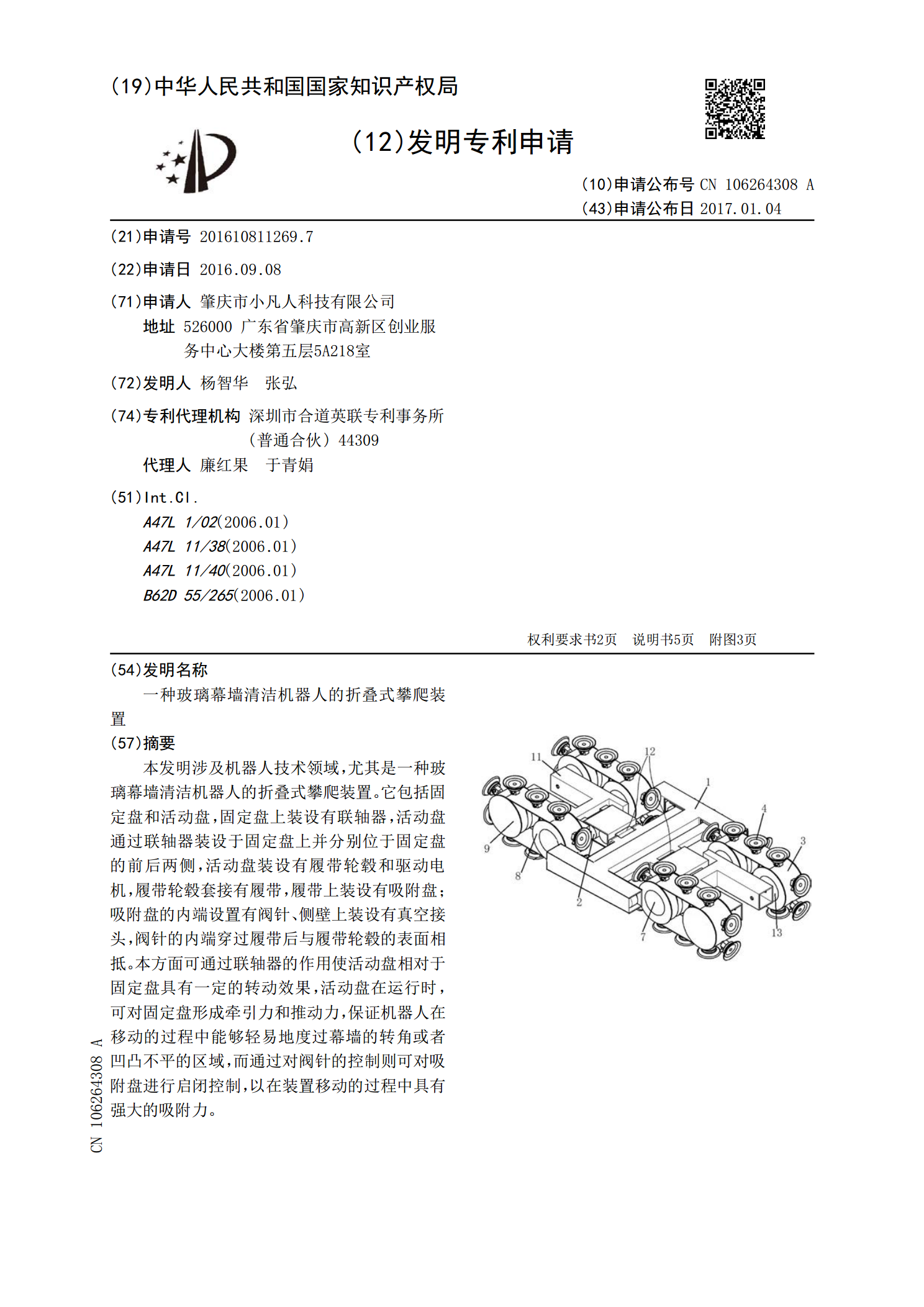
本发明涉及机器人技术领域,尤其是一种玻璃幕墙清洁机器人的折叠式攀爬装置。它包括固定盘和活动盘,固定盘上装设有联轴器,活动盘通过联轴器装设于固定盘上并分别位于固定盘的前后两侧,活动盘装设有履带轮毂和驱动电机,履带轮毂套接有履带,履带上装设有吸附盘;吸附盘的内端设置有阀针、侧壁上装设有真空接头,阀针的内端穿过履带后与履带轮毂的表面相抵。本方面可通过联轴器的作用使活动盘相对于固定盘具有一定的转动效果,活动盘在运行时,可对固定盘形成牵引力和推动力,保证机器人在移动的过程中能够轻易地度过幕墙的转角或者凹凸不平的区域
一种玻璃幕墙清洁机器人的攀爬驱动装置.pdf
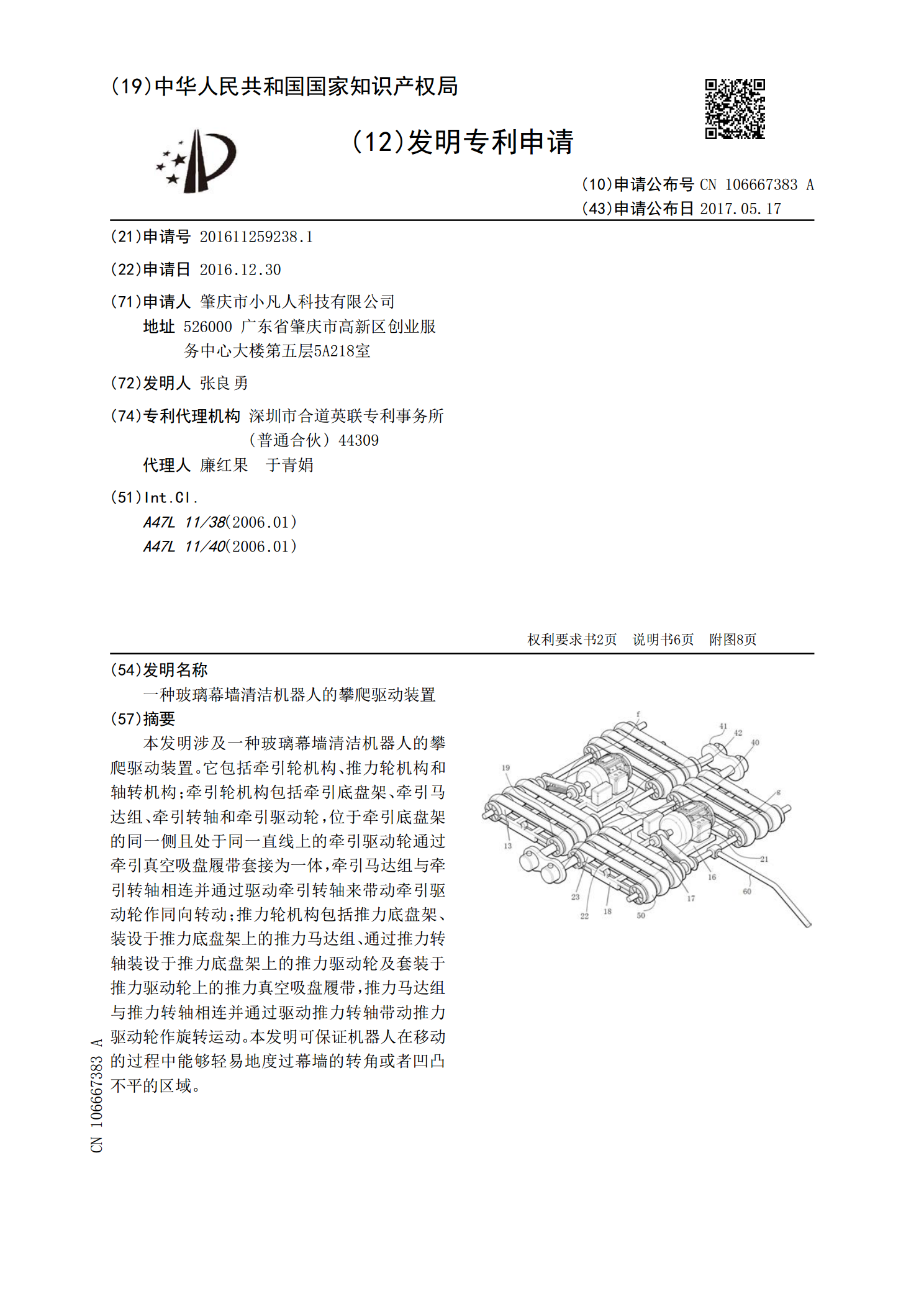
本发明涉及一种玻璃幕墙清洁机器人的攀爬驱动装置。它包括牵引轮机构、推力轮机构和轴转机构;牵引轮机构包括牵引底盘架、牵引马达组、牵引转轴和牵引驱动轮,位于牵引底盘架的同一侧且处于同一直线上的牵引驱动轮通过牵引真空吸盘履带套接为一体,牵引马达组与牵引转轴相连并通过驱动牵引转轴来带动牵引驱动轮作同向转动;推力轮机构包括推力底盘架、装设于推力底盘架上的推力马达组、通过推力转轴装设于推力底盘架上的推力驱动轮及套装于推力驱动轮上的推力真空吸盘履带,推力马达组与推力转轴相连并通过驱动推力转轴带动推力驱动轮作旋转运动。本
一种玻璃幕墙清洁机器人的吸附式攀爬装置.pdf
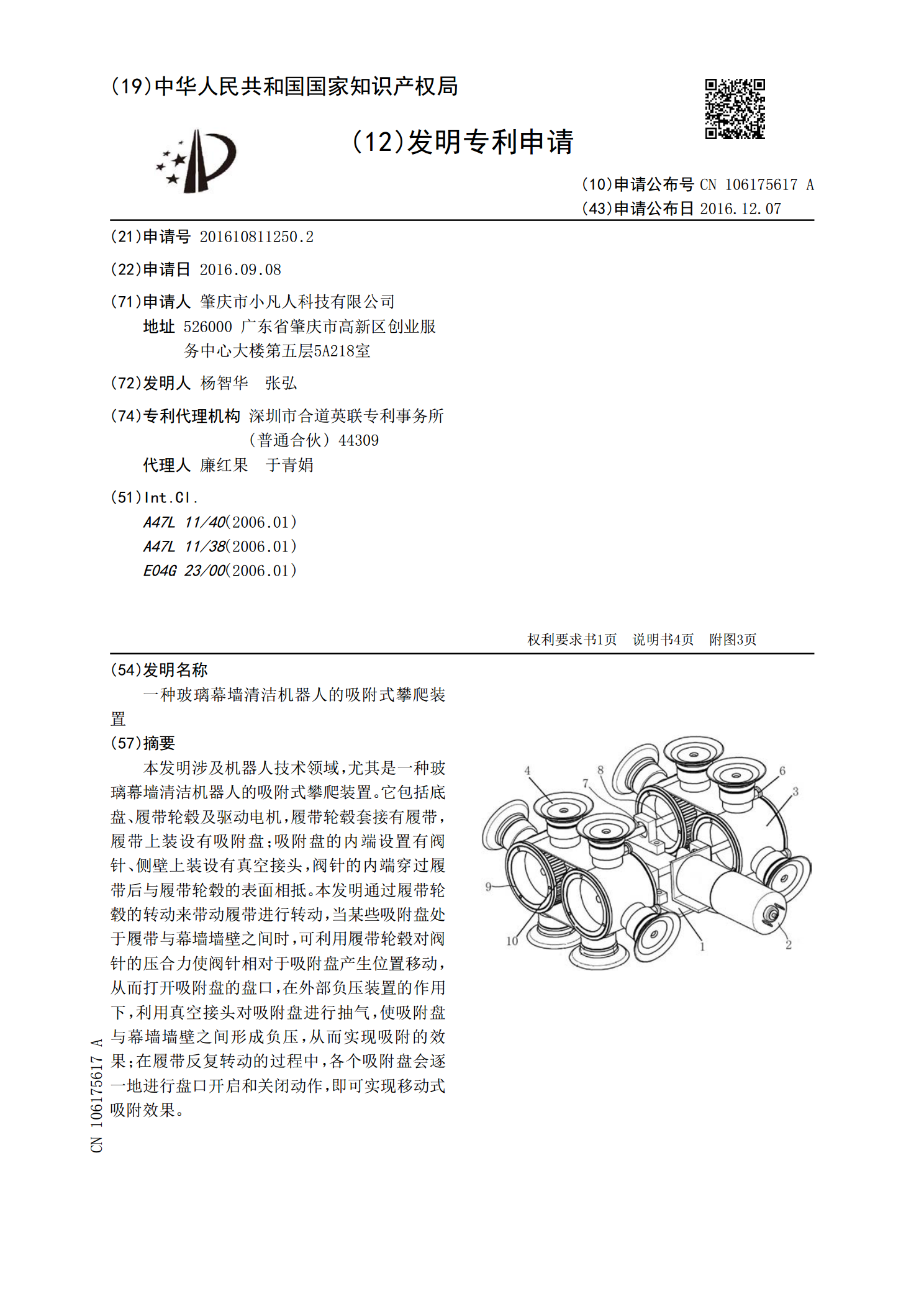
本发明涉及机器人技术领域,尤其是一种玻璃幕墙清洁机器人的吸附式攀爬装置。它包括底盘、履带轮毂及驱动电机,履带轮毂套接有履带,履带上装设有吸附盘;吸附盘的内端设置有阀针、侧壁上装设有真空接头,阀针的内端穿过履带后与履带轮毂的表面相抵。本发明通过履带轮毂的转动来带动履带进行转动,当某些吸附盘处于履带与幕墙墙壁之间时,可利用履带轮毂对阀针的压合力使阀针相对于吸附盘产生位置移动,从而打开吸附盘的盘口,在外部负压装置的作用下,利用真空接头对吸附盘进行抽气,使吸附盘与幕墙墙壁之间形成负压,从而实现吸附的效果;在履带反
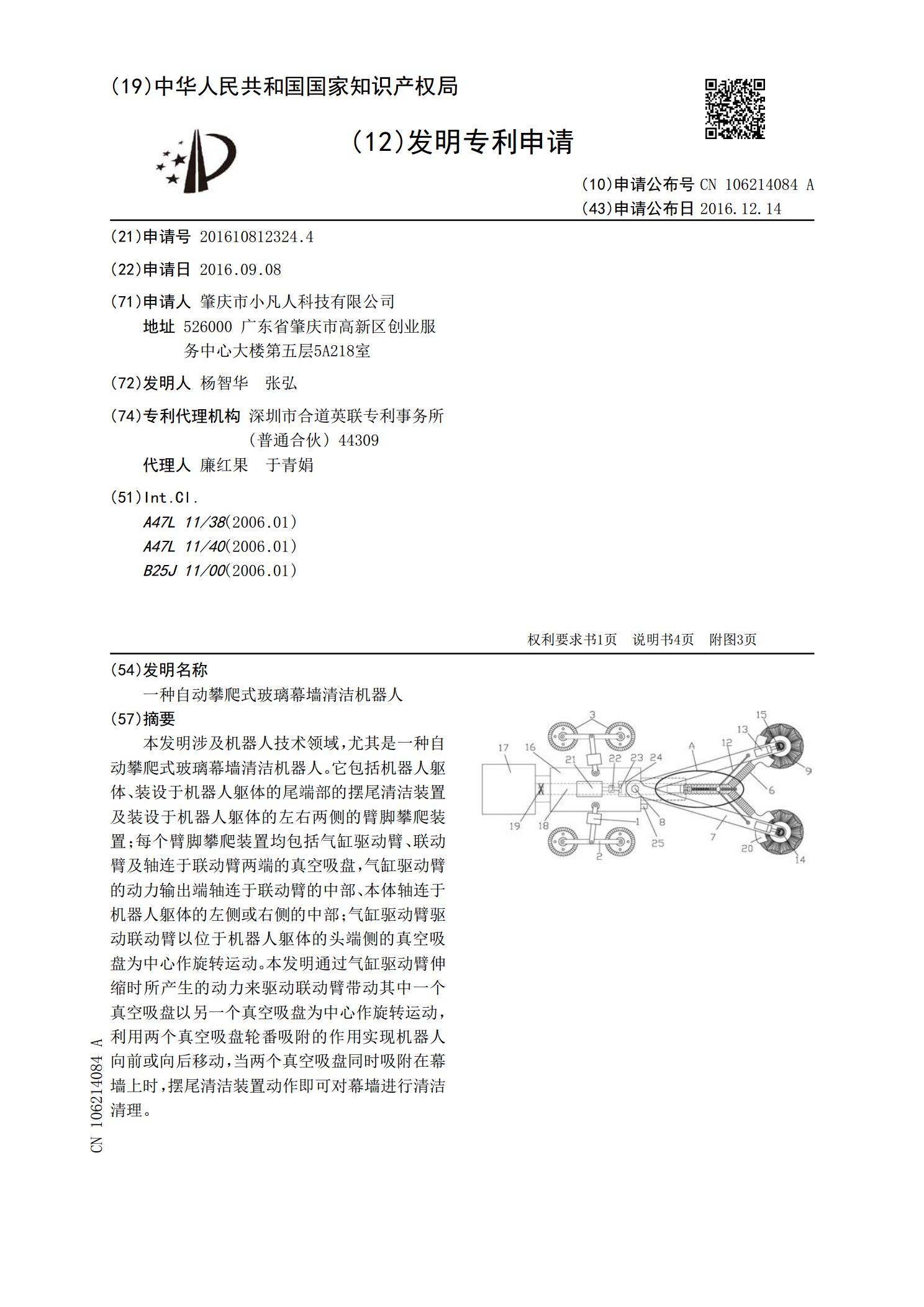
一种自动攀爬式玻璃幕墙清洁机器人.pdf
本发明涉及机器人技术领域,尤其是一种自动攀爬式玻璃幕墙清洁机器人。它包括机器人躯体、装设于机器人躯体的尾端部的摆尾清洁装置及装设于机器人躯体的左右两侧的臂脚攀爬装置;每个臂脚攀爬装置均包括气缸驱动臂、联动臂及轴连于联动臂两端的真空吸盘,气缸驱动臂的动力输出端轴连于联动臂的中部、本体轴连于机器人躯体的左侧或右侧的中部;气缸驱动臂驱动联动臂以位于机器人躯体的头端侧的真空吸盘为中心作旋转运动。本发明通过气缸驱动臂伸缩时所产生的动力来驱动联动臂带动其中一个真空吸盘以另一个真空吸盘为中心作旋转运动,利用两个真空吸盘
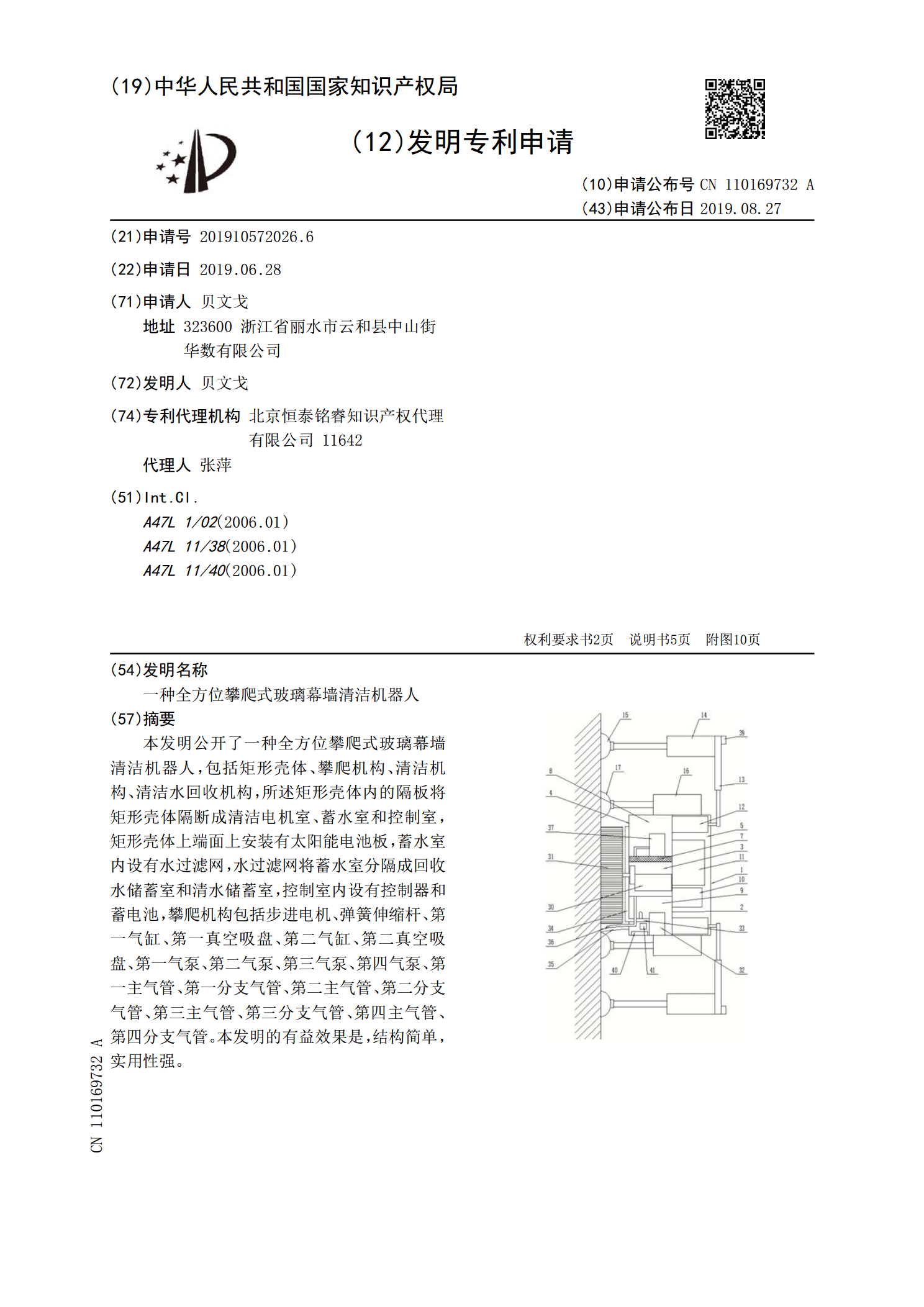
一种全方位攀爬式玻璃幕墙清洁机器人.pdf
本发明公开了一种全方位攀爬式玻璃幕墙清洁机器人,包括矩形壳体、攀爬机构、清洁机构、清洁水回收机构,所述矩形壳体内的隔板将矩形壳体隔断成清洁电机室、蓄水室和控制室,矩形壳体上端面上安装有太阳能电池板,蓄水室内设有水过滤网,水过滤网将蓄水室分隔成回收水储蓄室和清水储蓄室,控制室内设有控制器和蓄电池,攀爬机构包括步进电机、弹簧伸缩杆、第一气缸、第一真空吸盘、第二气缸、第二真空吸盘、第一气泵、第二气泵、第三气泵、第四气泵、第一主气管、第一分支气管、第二主气管、第二分支气管、第三主气管、第三分支气管、第四主气管、第