
一种RGV智能跨轨车.pdf

书生****专家

1/8
2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种RGV智能跨轨车.pdf
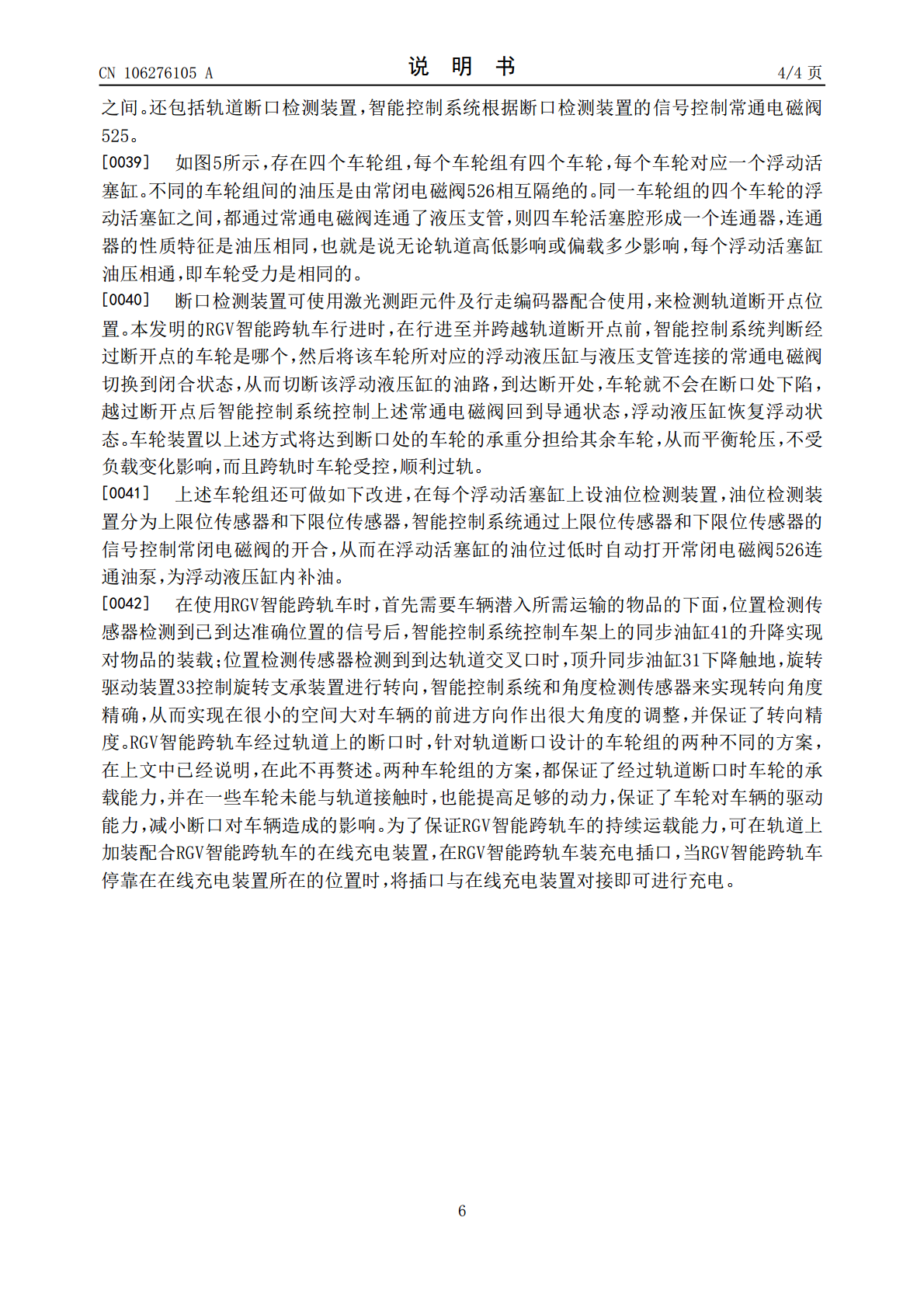
一种RGV智能跨轨车,包括智能控制系统、车架、至少四个驱动车辆前进的车轮装置,还包括用于控制车架旋转的旋转顶升系统,所述的旋转顶升系统包括可升降的底盘顶升装置、旋转支承装置、旋转驱动装置;所述的旋转支承装置通过旋转驱动装置与车架连接;所述的底盘顶升装置固定在旋转支承装置上,并配合合适的车轮装置,对车轮通过油压装置等方式给车轮分担压力。本发明的有益效果在于:在前进的过程中,无视于承重,均能够在很小的区间内转向,能够克服轨道间隙,而不影响正常行驶运载物品。

一种RGV地轨车防撞提醒机构.pdf
本发明公开了一种RGV地轨车防撞提醒机构,涉及RGV地轨车防撞提醒技术领域,包括车厢以及腾空架起车厢且能够辅助车厢移动的支撑机构,车厢的两侧侧壁均固定内嵌有若干个均匀间隔分布的激光测距传感器,若干个激光测距传感器的信号输出端口连接有控制模块,控制模块的信号输出端口连接有内嵌于车厢侧壁的蜂鸣器,每个支撑柱的顶端与车厢的底端面固定连接,第一电磁铁和第二电磁铁通过导线与控制模块的信号输出端口连接,托盘的两侧侧壁固定设有分别与第一电磁铁和第二电磁铁正对分布的铁板。本发明车厢行进过程中,有物体距离车厢距离小于预设阈

一种旋转辊道式RGV智能车.pdf
一种旋转辊道式RGV智能车,包括车体、行进轮,还包括位于车体上方的、用于运载物品的旋转辊道移载装置;所述的旋转辊道移载装置包括输送辊道、旋转装置、顶升装置;所述的输送辊道位于车体上面;所述的旋转装置与输送辊道相连,用于控制输送辊道旋转;所述的顶升装置位于车体上部。本发明的有益效果在于:本发明能够更方便地对辊道上的物品进行承接;本发明能够实现辊道变换方向时的辊道的对接。

一种高效智能RGV物流输送轨道车.pdf
本实用新型涉及一种高效智能RGV物流输送轨道车,包括两条相互平行的轨道(1),其上设有机架本体(2)、纵横双向输送动力装置(3)和安全防护装置(4),机架本体(2)包括小车底盘(21)、滚筒输送主动侧主梁(22)和滚筒输送被动侧主梁(23),纵横双向输送动力装置(3)包括纵移电机(31)、纵移减速机(32)、纵移链轮传动装置(33)、滚筒(34)、横移电机(35)、横移减速机(36)、横移链轮传动装置(37)、横移传动轴(38)和横移行走轮(39)。本实用新型的优点是实现自动化无人化生产,提高企业生产效率
一种堆垛RGV车.pdf
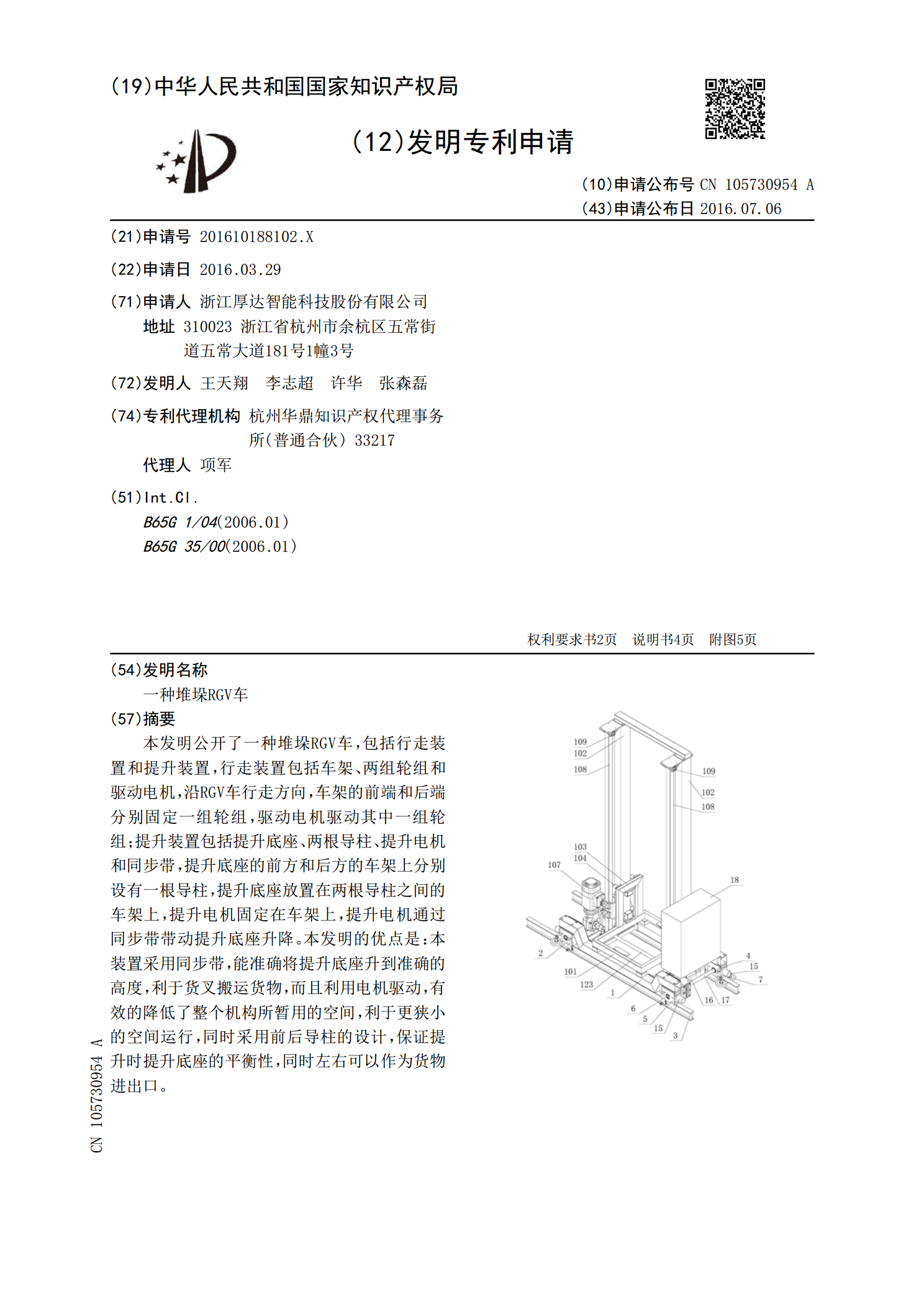
本发明公开了一种堆垛RGV车,包括行走装置和提升装置,行走装置包括车架、两组轮组和驱动电机,沿RGV车行走方向,车架的前端和后端分别固定一组轮组,驱动电机驱动其中一组轮组;提升装置包括提升底座、两根导柱、提升电机和同步带,提升底座的前方和后方的车架上分别设有一根导柱,提升底座放置在两根导柱之间的车架上,提升电机固定在车架上,提升电机通过同步带带动提升底座升降。本发明的优点是:本装置采用同步带,能准确将提升底座升到准确的高度,利于货叉搬运货物,而且利用电机驱动,有效的降低了整个机构所暂用的空间,利于更狭小的