
一种测力轮对轮轨力的修正方法及系统.pdf

一吃****永贺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种测力轮对轮轨力的修正方法及系统.pdf
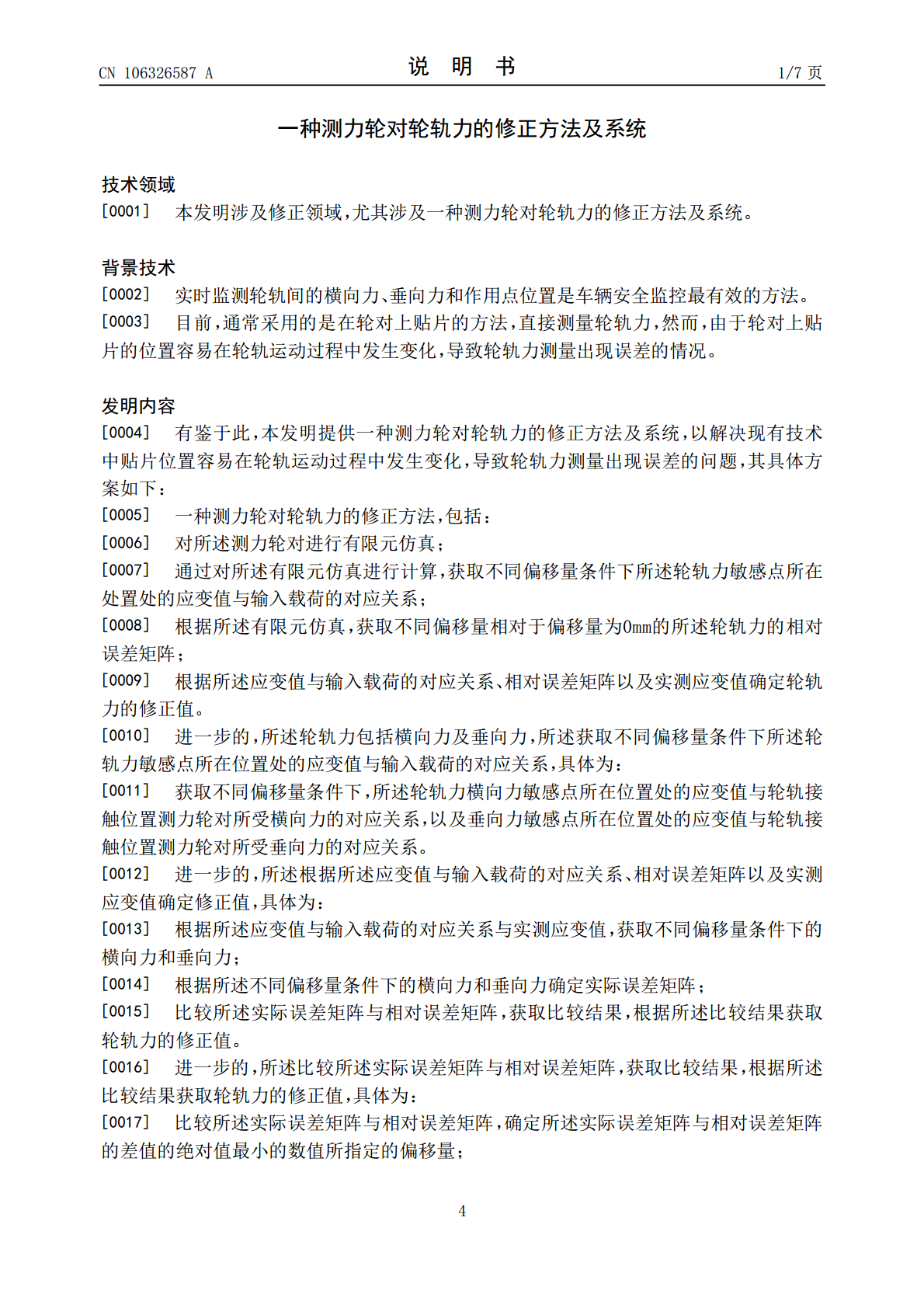
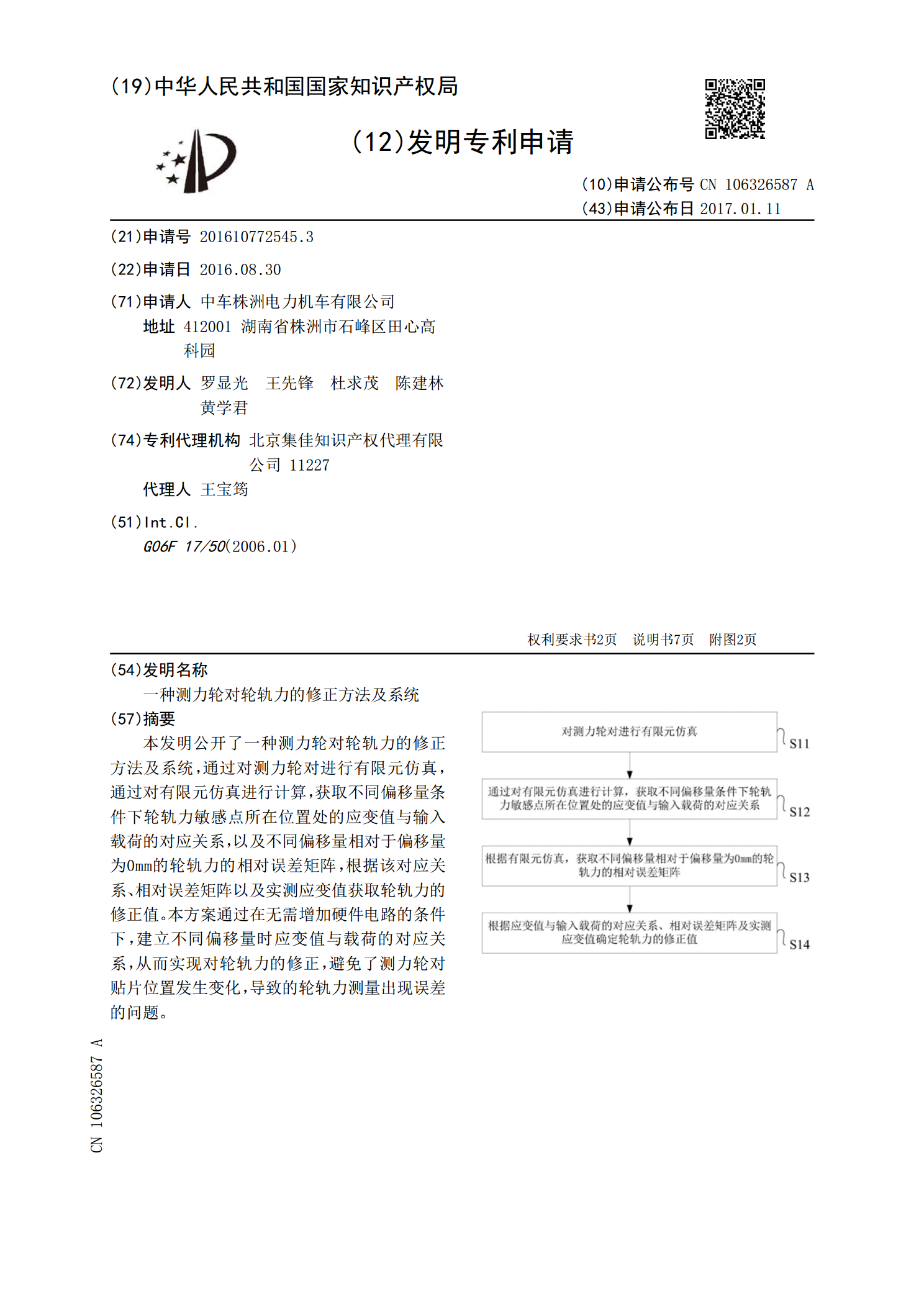
本发明公开了一种测力轮对轮轨力的修正方法及系统,通过对测力轮对进行有限元仿真,通过对有限元仿真进行计算,获取不同偏移量条件下轮轨力敏感点所在位置处的应变值与输入载荷的对应关系,以及不同偏移量相对于偏移量为0mm的轮轨力的相对误差矩阵,根据该对应关系、相对误差矩阵以及实测应变值获取轮轨力的修正值。本方案通过在无需增加硬件电路的条件下,建立不同偏移量时应变值与载荷的对应关系,从而实现对轮轨力的修正,避免了测力轮对贴片位置发生变化,导致的轮轨力测量出现误差的问题。
一种基于测力轮对的轮轨力连续测量方法.pdf
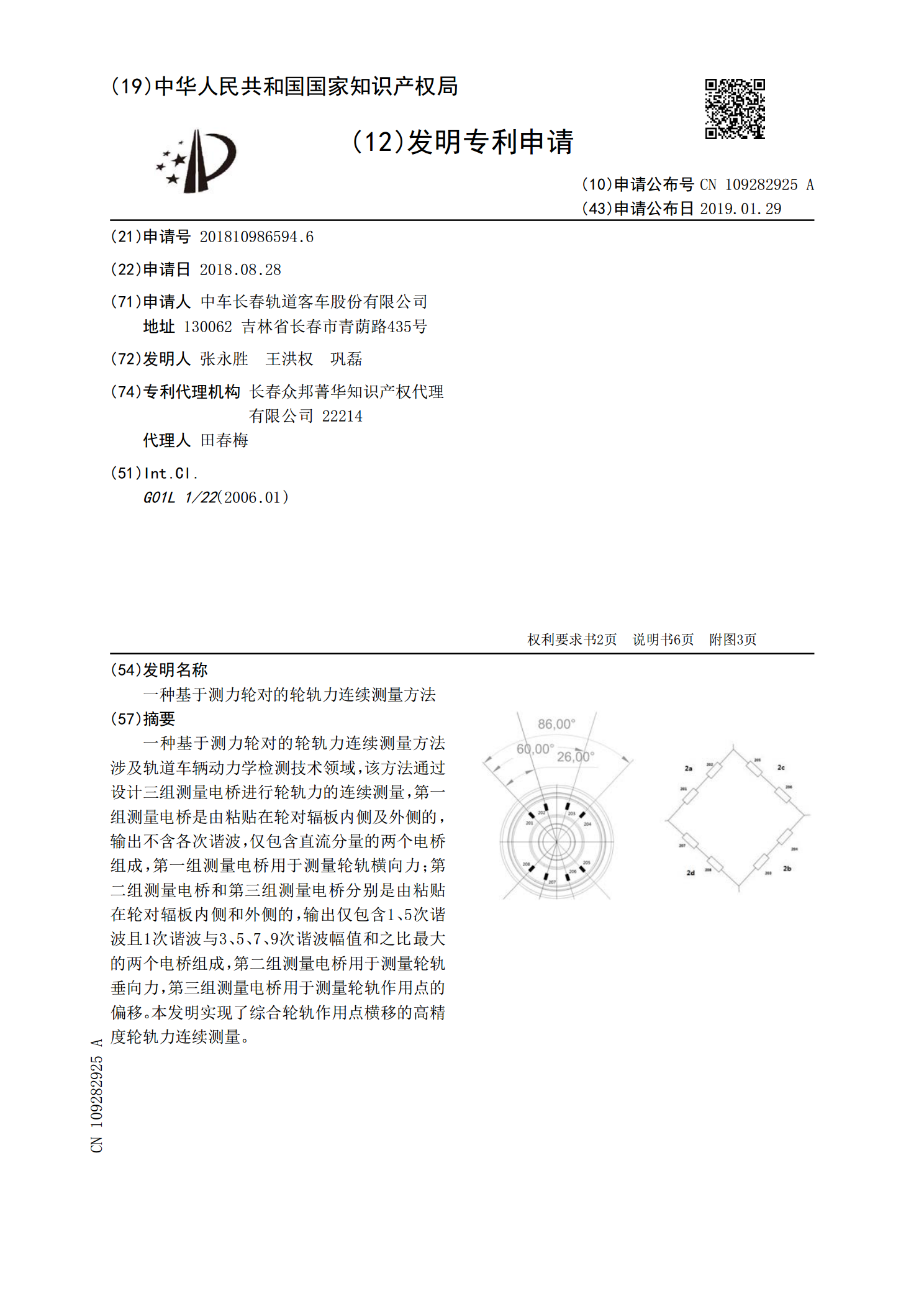
一种基于测力轮对的轮轨力连续测量方法涉及轨道车辆动力学检测技术领域,该方法通过设计三组测量电桥进行轮轨力的连续测量,第一组测量电桥是由粘贴在轮对辐板内侧及外侧的,输出不含各次谐波,仅包含直流分量的两个电桥组成,第一组测量电桥用于测量轮轨横向力;第二组测量电桥和第三组测量电桥分别是由粘贴在轮对辐板内侧和外侧的,输出仅包含1、5次谐波且1次谐波与3、5、7、9次谐波幅值和之比最大的两个电桥组成,第二组测量电桥用于测量轮轨垂向力,第三组测量电桥用于测量轮轨作用点的偏移。本发明实现了综合轮轨作用点横移的高精度轮轨
一种卧式测力轮对轮轨力标定试验台.pdf
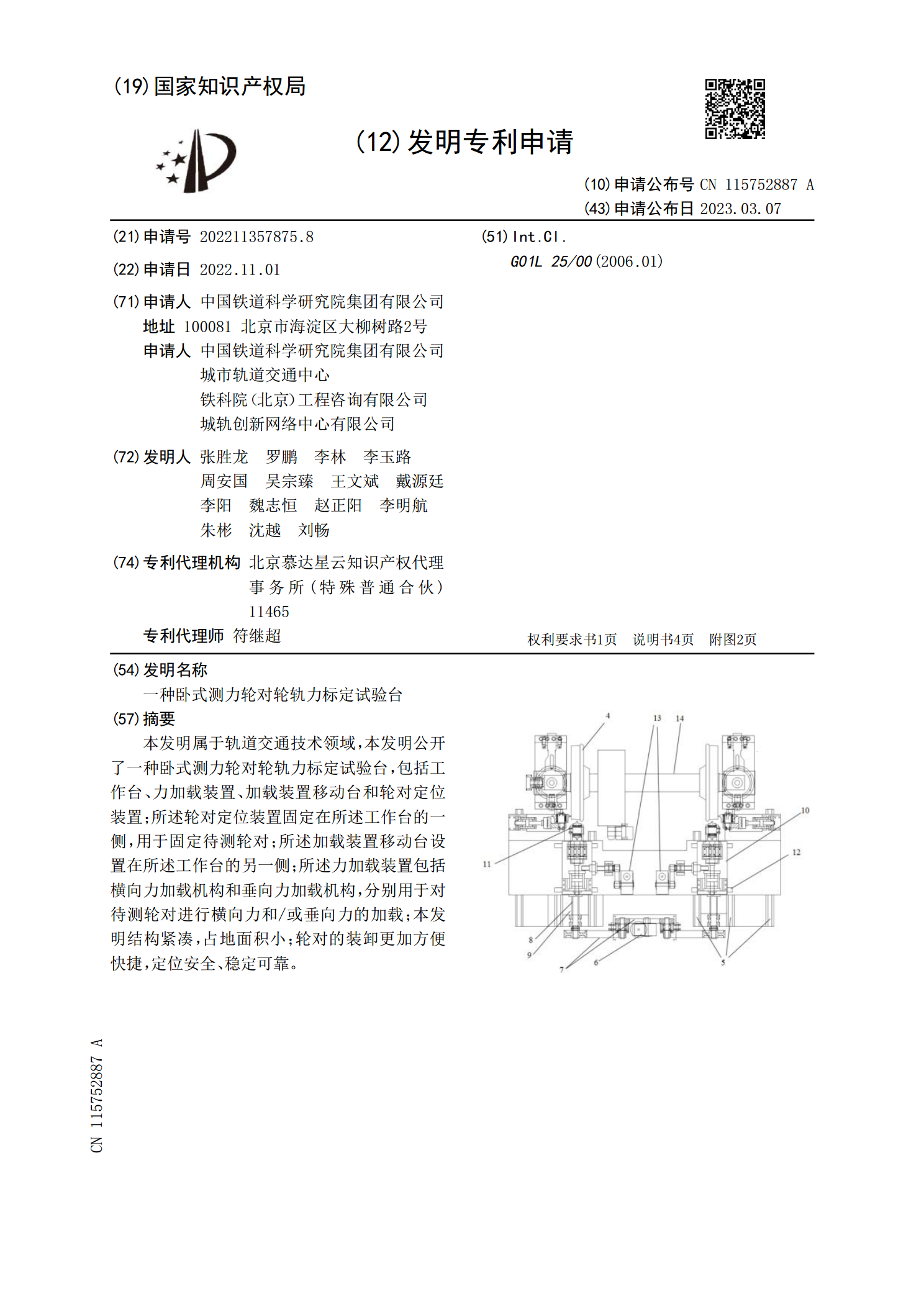
本发明属于轨道交通技术领域,本发明公开了一种卧式测力轮对轮轨力标定试验台,包括工作台、力加载装置、加载装置移动台和轮对定位装置;所述轮对定位装置固定在所述工作台的一侧,用于固定待测轮对;所述加载装置移动台设置在所述工作台的另一侧;所述力加载装置包括横向力加载机构和垂向力加载机构,分别用于对待测轮对进行横向力和/或垂向力的加载;本发明结构紧凑,占地面积小;轮对的装卸更加方便快捷,定位安全、稳定可靠。
一种全息轮轨力辨识方法及系统.pdf
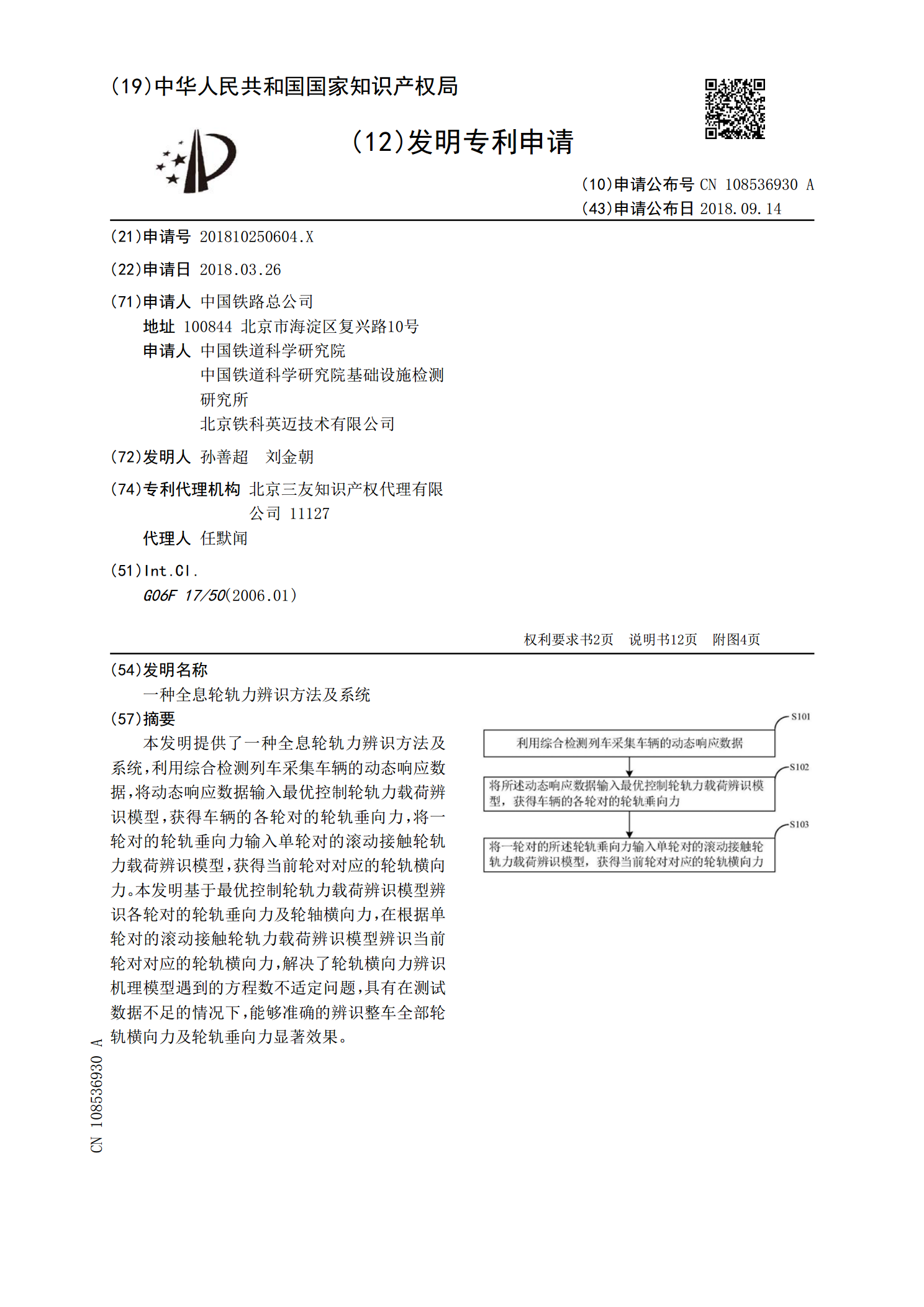
本发明提供了一种全息轮轨力辨识方法及系统,利用综合检测列车采集车辆的动态响应数据,将动态响应数据输入最优控制轮轨力载荷辨识模型,获得车辆的各轮对的轮轨垂向力,将一轮对的轮轨垂向力输入单轮对的滚动接触轮轨力载荷辨识模型,获得当前轮对对应的轮轨横向力。本发明基于最优控制轮轨力载荷辨识模型辨识各轮对的轮轨垂向力及轮轴横向力,在根据单轮对的滚动接触轮轨力载荷辨识模型辨识当前轮对对应的轮轨横向力,解决了轮轨横向力辨识机理模型遇到的方程数不适定问题,具有在测试数据不足的情况下,能够准确的辨识整车全部轮轨横向力及轮轨垂

一种测力轮对的连续测量方法及装置.pdf
本发明涉及铁道机车车辆轮轨力测量领域,为了解决现有技术中测力轮对测量方法繁杂,测量精度不够高等问题,提供了一种新型的测力轮对的连续测量方法及装置,其中方法包括采用在同周期内一个测量电桥的灵敏度为正弦形,另一个测量电桥的灵敏度为余弦形的第一组双桥路对轮轨垂向力进行测量;采用在同周期内一个测量电桥的灵敏度为正弦形,另一个测量电桥的灵敏度为余弦形的第二组双桥路对轮轨横向力进行测量。本发明实施例的有益效果在于,由于对垂向力、横向力使用了同样周期的双桥路的测量手段,并经过迭加合成处理,就可以使得在车轮旋转的整个轮周