
一种全息轮轨力辨识方法及系统.pdf

小长****6淑

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全息轮轨力辨识方法及系统.pdf
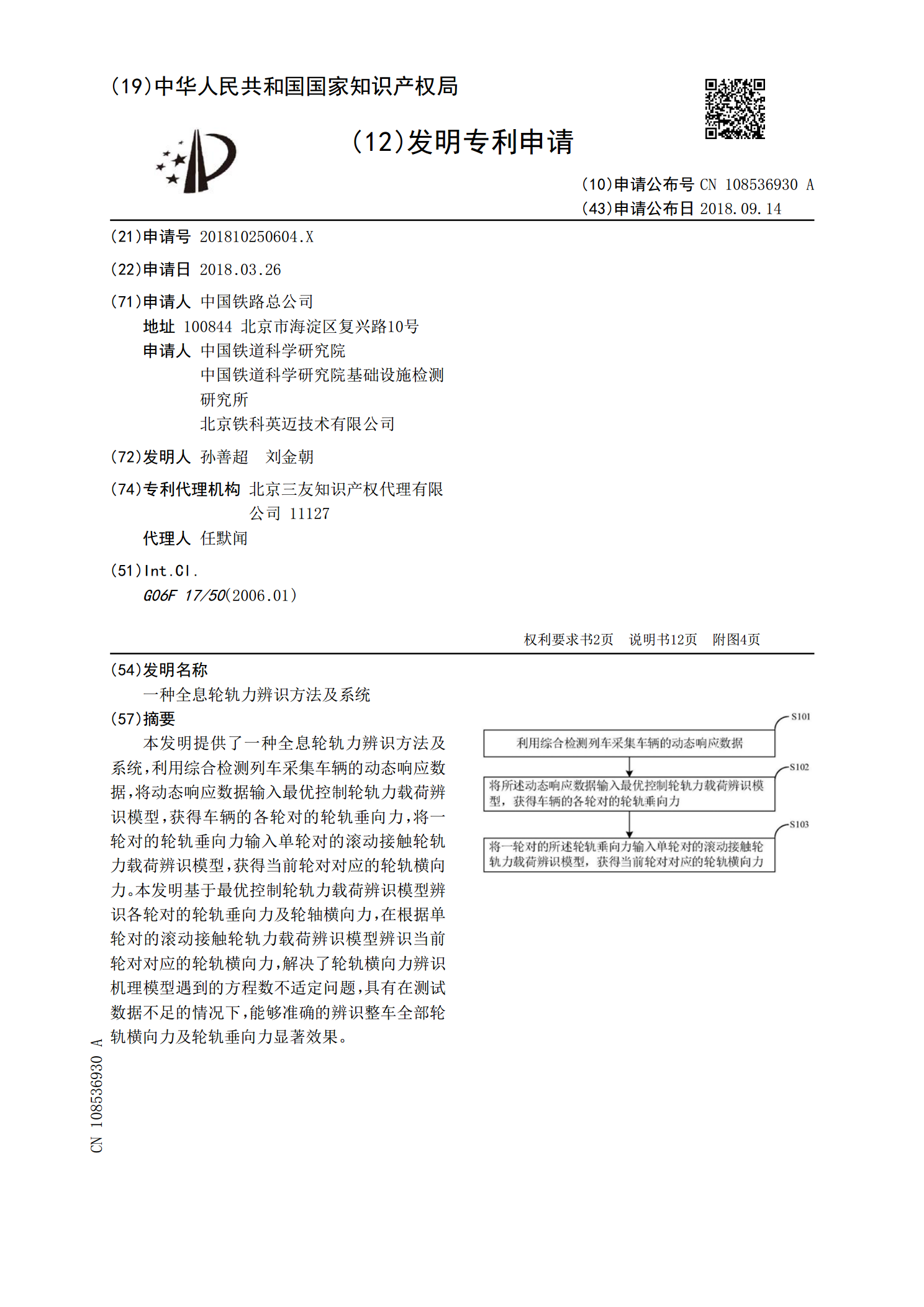
本发明提供了一种全息轮轨力辨识方法及系统,利用综合检测列车采集车辆的动态响应数据,将动态响应数据输入最优控制轮轨力载荷辨识模型,获得车辆的各轮对的轮轨垂向力,将一轮对的轮轨垂向力输入单轮对的滚动接触轮轨力载荷辨识模型,获得当前轮对对应的轮轨横向力。本发明基于最优控制轮轨力载荷辨识模型辨识各轮对的轮轨垂向力及轮轴横向力,在根据单轮对的滚动接触轮轨力载荷辨识模型辨识当前轮对对应的轮轨横向力,解决了轮轨横向力辨识机理模型遇到的方程数不适定问题,具有在测试数据不足的情况下,能够准确的辨识整车全部轮轨横向力及轮轨垂
一种轮轨粘着特性的辨识方法以及系统.pdf
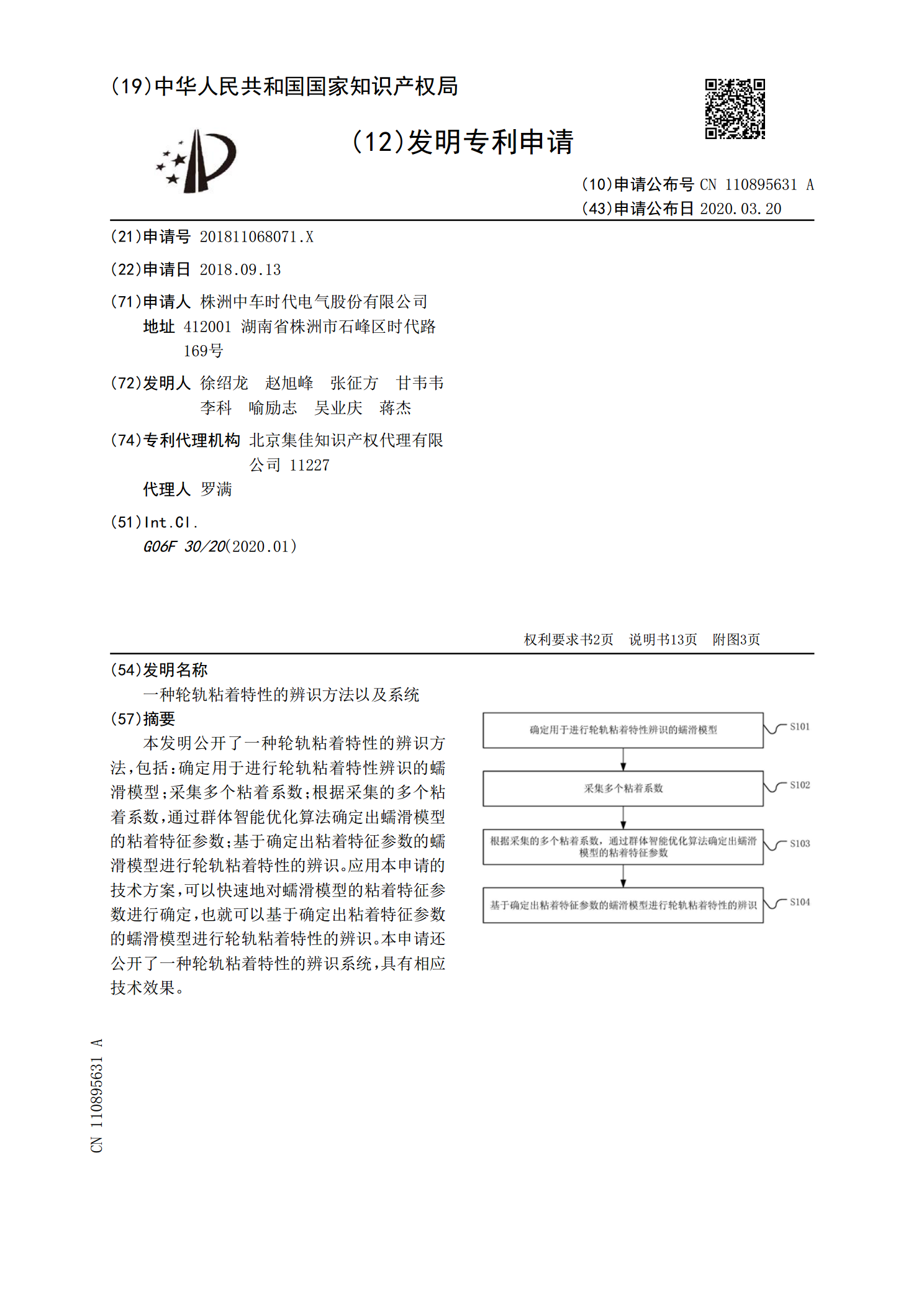
本发明公开了一种轮轨粘着特性的辨识方法,包括:确定用于进行轮轨粘着特性辨识的蠕滑模型;采集多个粘着系数;根据采集的多个粘着系数,通过群体智能优化算法确定出蠕滑模型的粘着特征参数;基于确定出粘着特征参数的蠕滑模型进行轮轨粘着特性的辨识。应用本申请的技术方案,可以快速地对蠕滑模型的粘着特征参数进行确定,也就可以基于确定出粘着特征参数的蠕滑模型进行轮轨粘着特性的辨识。本申请还公开了一种轮轨粘着特性的辨识系统,具有相应技术效果。
一种测力轮对轮轨力的修正方法及系统.pdf
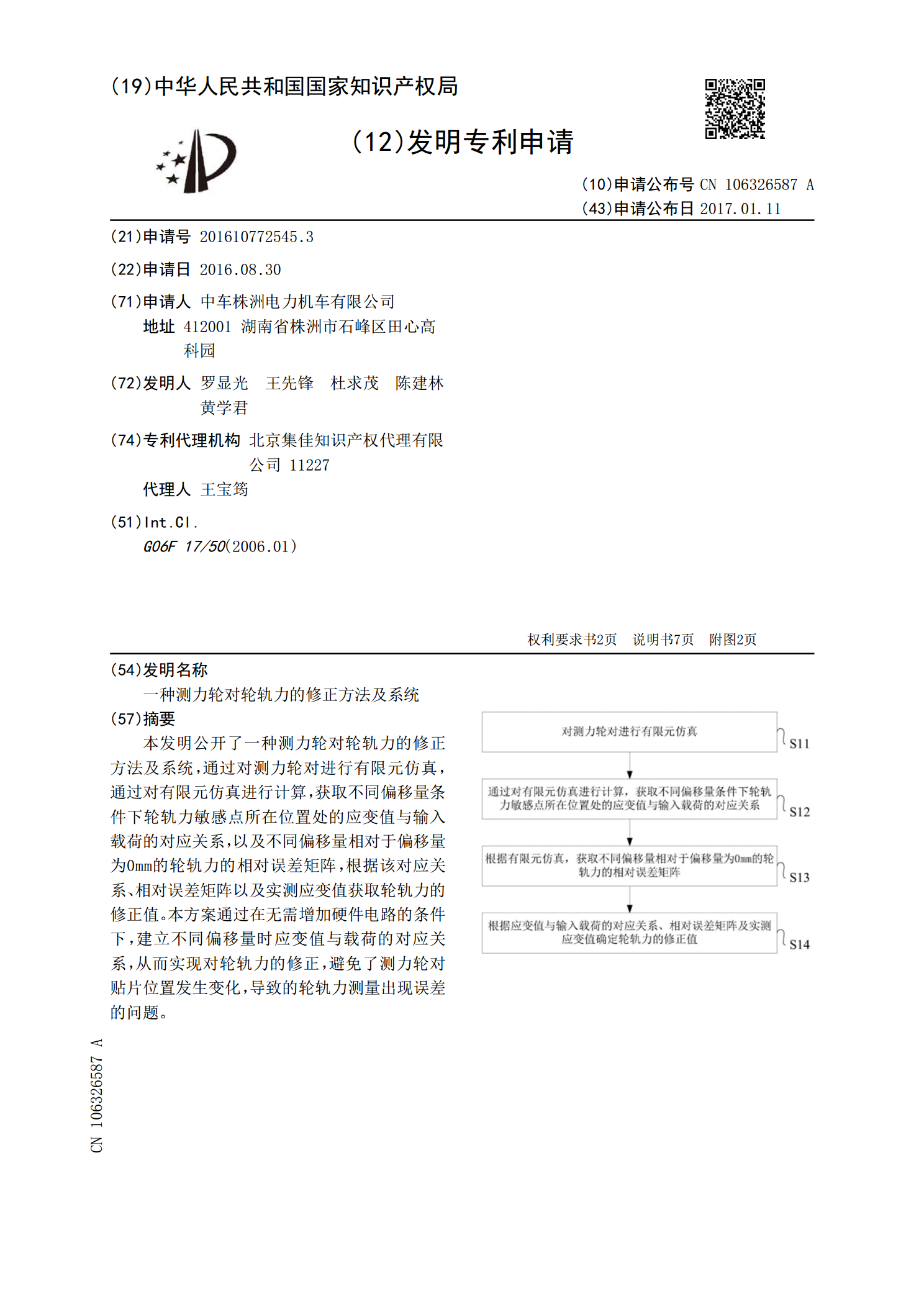
本发明公开了一种测力轮对轮轨力的修正方法及系统,通过对测力轮对进行有限元仿真,通过对有限元仿真进行计算,获取不同偏移量条件下轮轨力敏感点所在位置处的应变值与输入载荷的对应关系,以及不同偏移量相对于偏移量为0mm的轮轨力的相对误差矩阵,根据该对应关系、相对误差矩阵以及实测应变值获取轮轨力的修正值。本方案通过在无需增加硬件电路的条件下,建立不同偏移量时应变值与载荷的对应关系,从而实现对轮轨力的修正,避免了测力轮对贴片位置发生变化,导致的轮轨力测量出现误差的问题。

一种轮轨力载荷辨识特征数据模型建立方法及装置.pdf
本发明涉及一种轮轨力载荷辨识特征数据模型建立方法及装置,其中,方法包括:利用基于变参数域和短时高斯线性调频基的自适应信号分解算法提取轨道‑车辆系统检测数据的时频特征;使用多节点协同共轭稀疏主成分分析算法对所述轨道‑车辆系统检测数据的时频特征进行融合;以多节点特征融合数据作为样本数据集,使用L

一种轮轨水平力测量系统.pdf
本实用新型实施例公开了一种轮轨水平力测量系统。该测量系统包括:剪力测量单元,用于采集剪力测量点的轮对作用力;水平力测量单元,用于采集水平力测量点的轮对作用力;以及中央控制单元,通过有线或无线方式分别与剪力测量单元和水平力测量单元连接,用于获取单元测量区间内每个水平力测量点的轮对作用力和每个剪力测量点的轮对作用力,再根据每个水平力测量点的轮对作用力以及每个剪力测量点的轮对作用力,计算作用在单元测量区间的轮轨水平力。本实用新型实施例中,通过增加约束条件、划分单元测区并将各单元测区的水平力进行组合得到连续的轮轨