
船舶外板爬壁拖涂式机器人及其作业方法.pdf

冷霜****魔王


1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
船舶外板爬壁拖涂式机器人及其作业方法.pdf
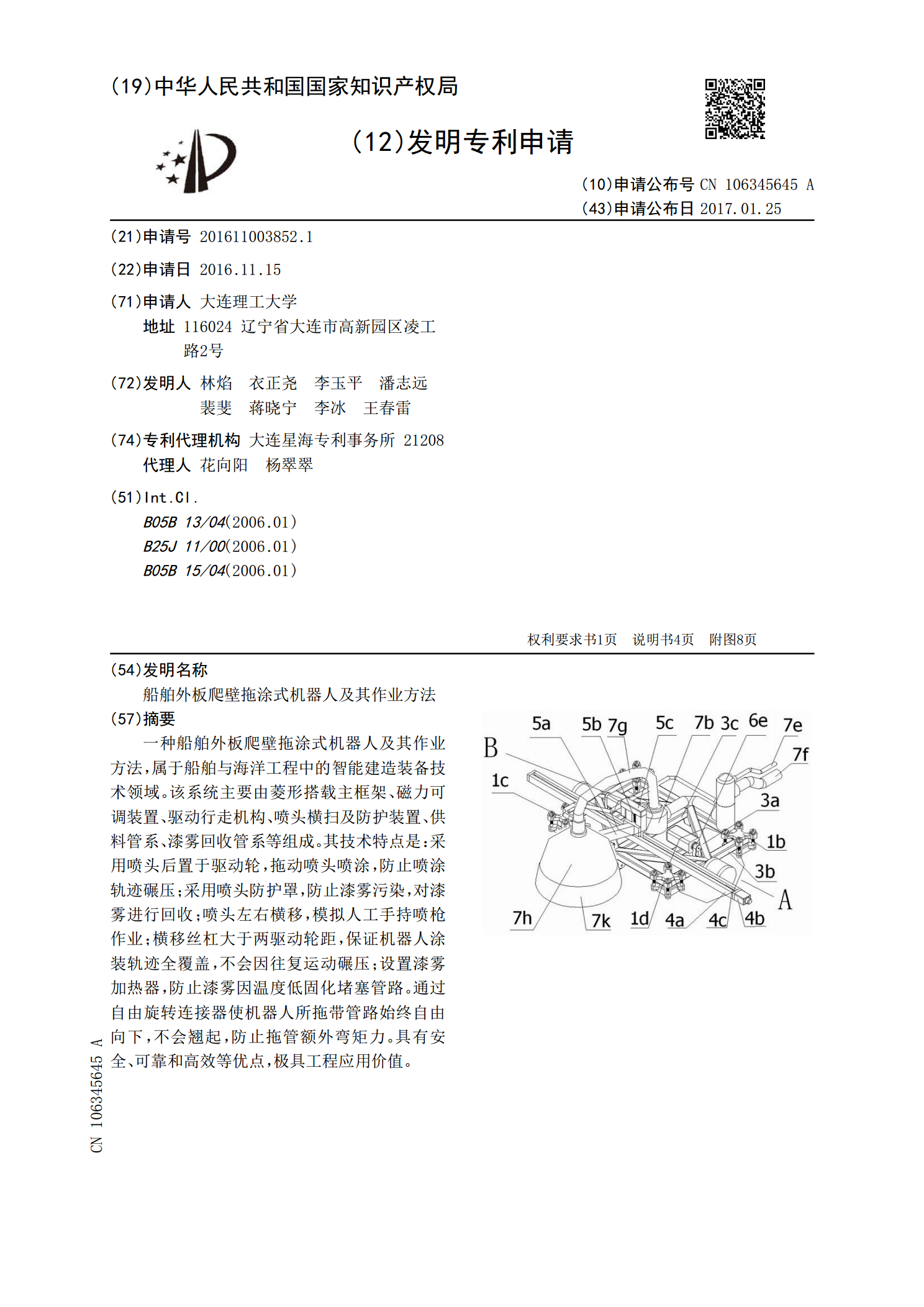
一种船舶外板爬壁拖涂式机器人及其作业方法,属于船舶与海洋工程中的智能建造装备技术领域。该系统主要由菱形搭载主框架、磁力可调装置、驱动行走机构、喷头横扫及防护装置、供料管系、漆雾回收管系等组成。其技术特点是:采用喷头后置于驱动轮,拖动喷头喷涂,防止喷涂轨迹碾压;采用喷头防护罩,防止漆雾污染,对漆雾进行回收;喷头左右横移,模拟人工手持喷枪作业;横移丝杠大于两驱动轮距,保证机器人涂装轨迹全覆盖,不会因往复运动碾压;设置漆雾加热器,防止漆雾因温度低固化堵塞管路。通过自由旋转连接器使机器人所拖带管路始终自由向下,不

大型船舶外板焊接爬壁机.pdf
本发明属于船用机器人领域,更具体地说,涉及大型船舶外板焊接爬壁机。其包括驱动模块、磁性减振牵引模块和搭载平台,所述驱动模块通过磁性减振牵引模块与搭载平台连接,所述磁性减振牵引模块位于驱动模块和搭载平台之间,所述驱动模块包括齿轮履带、齿动轮、中央车架和电机,所述搭载平台包括搭载托台、永磁体仓和导轮机构,所述磁性减振牵引模块包括固定在中央连杆两端对称的磁性固定连接机构,所述磁性固定连接机构分别与所述中央车架的一端和所述搭载托台的一端固定连接。本发明结构相对简单,使用简便,易于向船舶制造企业推广,具有很高的商业
钩爪式六足爬壁机器人及其运动方法.pdf
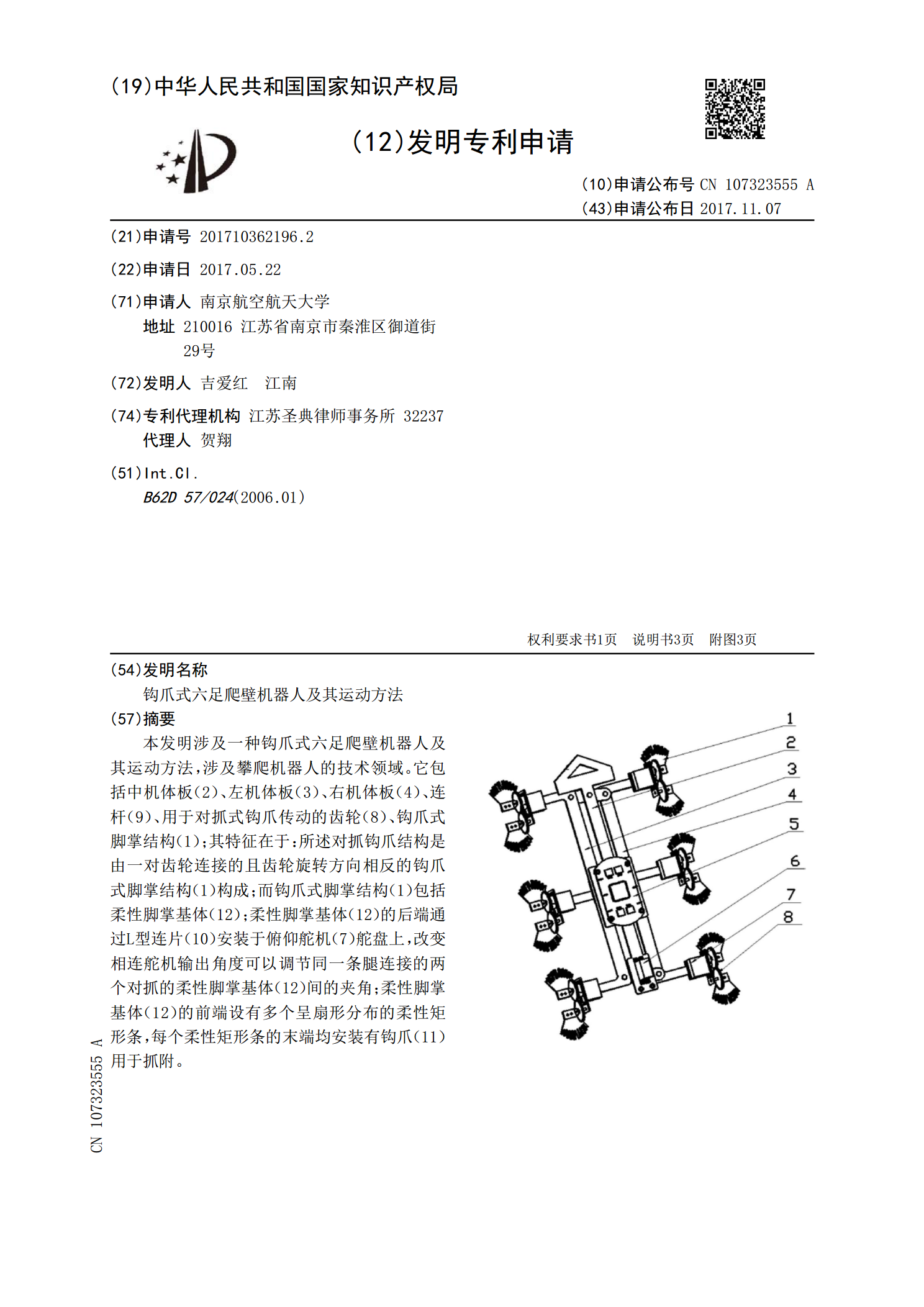
本发明涉及一种钩爪式六足爬壁机器人及其运动方法,涉及攀爬机器人的技术领域。它包括中机体板(2)、左机体板(3)、右机体板(4)、连杆(9)、用于对抓式钩爪传动的齿轮(8)、钩爪式脚掌结构(1);其特征在于:所述对抓钩爪结构是由一对齿轮连接的且齿轮旋转方向相反的钩爪式脚掌结构(1)构成;而钩爪式脚掌结构(1)包括柔性脚掌基体(12);柔性脚掌基体(12)的后端通过L型连片(10)安装于俯仰舵机(7)舵盘上,改变相连舵机输出角度可以调节同一条腿连接的两个对抓的柔性脚掌基体(12)间的夹角;柔性脚掌基体(12)
磁吸式爬壁机器人及其工作方法.pdf
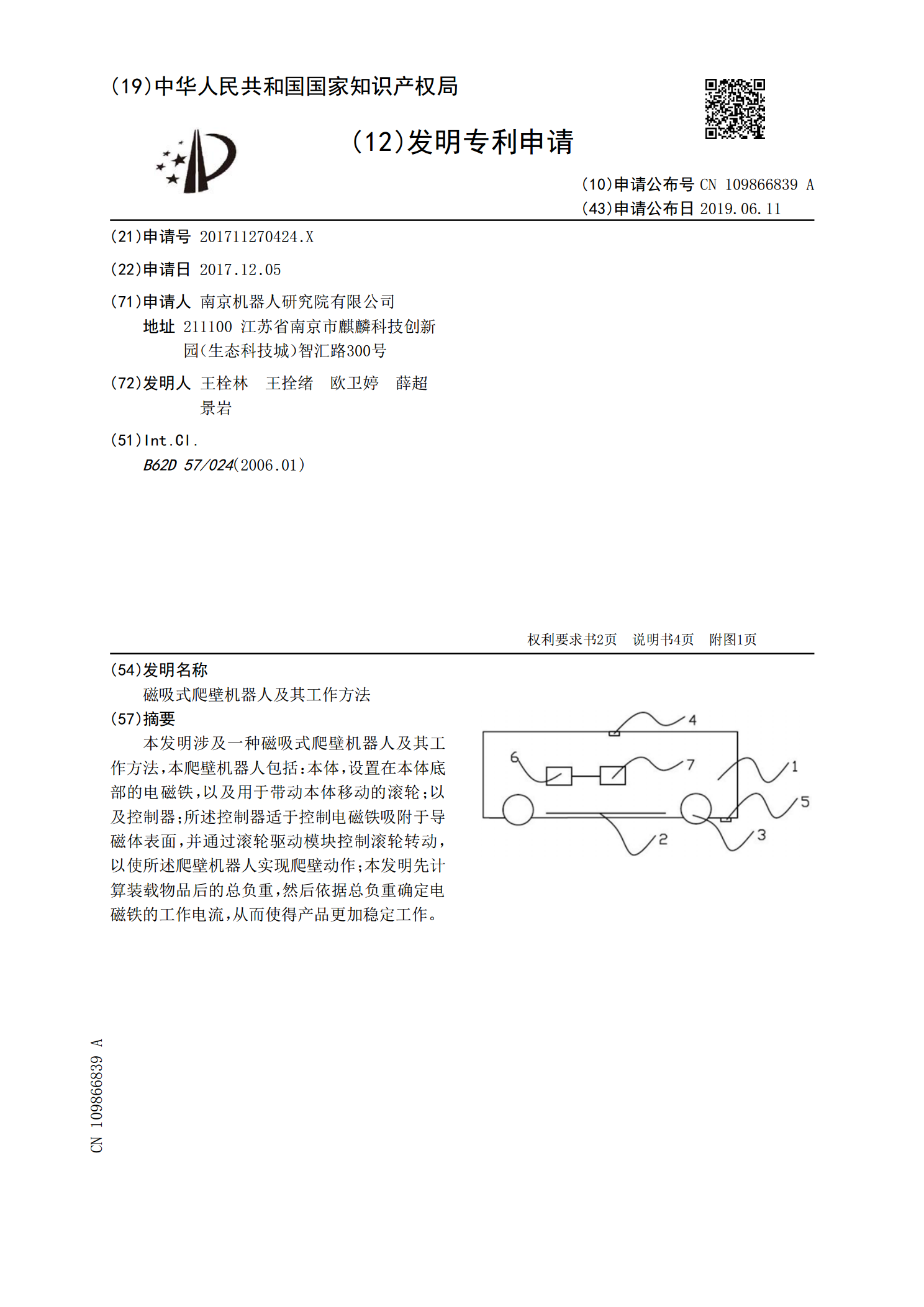
本发明涉及一种磁吸式爬壁机器人及其工作方法,本爬壁机器人包括:本体,设置在本体底部的电磁铁,以及用于带动本体移动的滚轮;以及控制器;所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作;本发明先计算装载物品后的总负重,然后依据总负重确定电磁铁的工作电流,从而使得产品更加稳定工作。

船舶除锈爬壁机器人.pdf
本发明属于爬壁机器人技术领域,尤其涉及一种船舶除锈爬壁机器人,包括机架、驱动机构、真空清洗机构和吸附行走机构;吸附行走机构包括安装于机架的侧部的主动磁轮组和从动磁轮组及皮带组;驱动机构驱动主动磁轮组和从动磁轮组转动;真空清洗机构包括水射流冲洗机构、浮动机构、真空罩和橡胶皮囊,真空罩与机架连接并位于机架中部的下方,水射流冲洗机构安装于真空罩上,橡胶皮囊连接于真空罩的周缘,浮动机构连接于橡胶皮囊与真空罩的顶部之间以带动橡胶皮囊上下运动。本发明的船舶除锈爬壁机器人,大幅提高了船舶除锈爬壁机器人的吸附能力和越障能