
磁吸式爬壁机器人及其工作方法.pdf

岚风****55


1/8
2/8
3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
磁吸式爬壁机器人及其工作方法.pdf
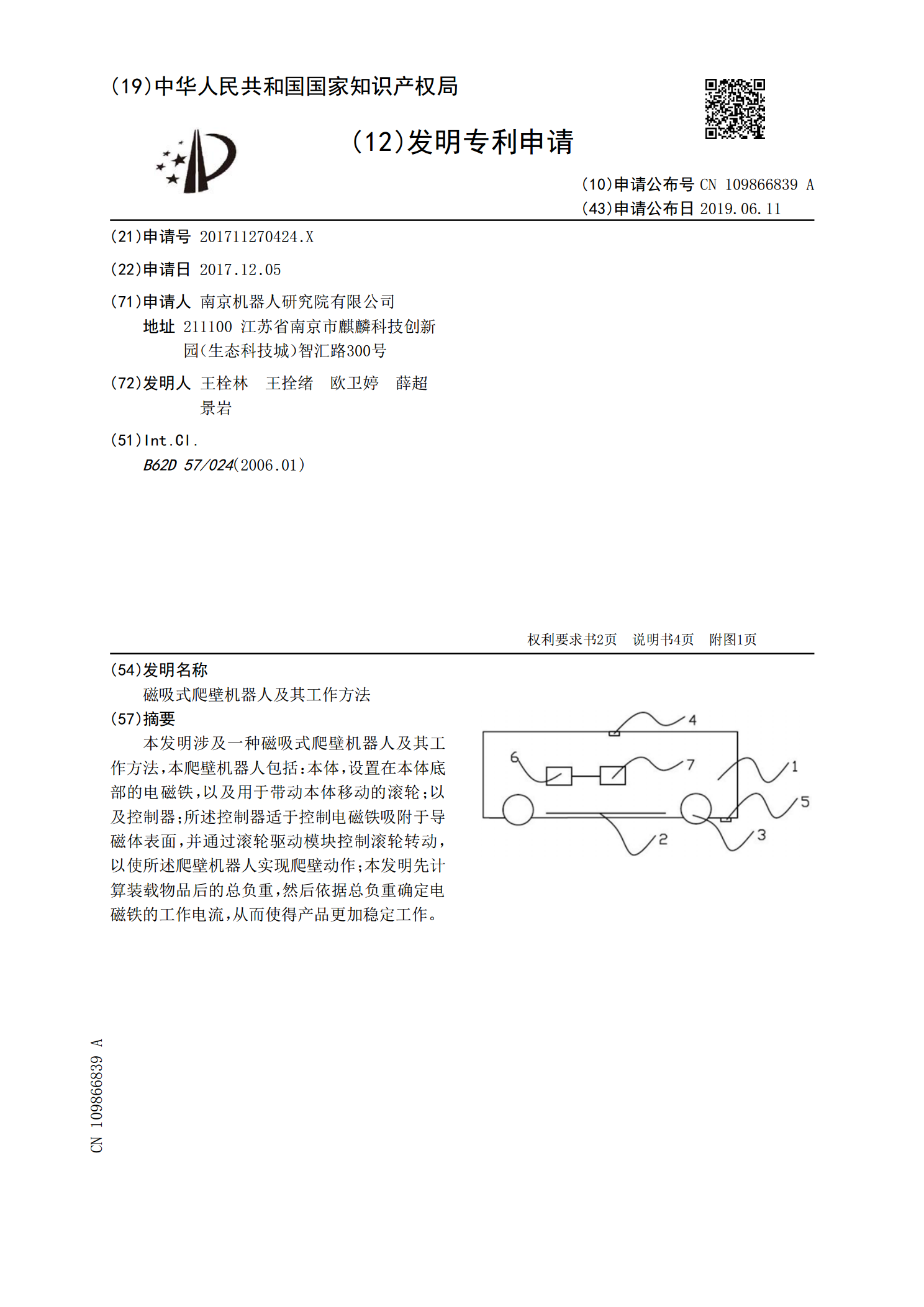
本发明涉及一种磁吸式爬壁机器人及其工作方法,本爬壁机器人包括:本体,设置在本体底部的电磁铁,以及用于带动本体移动的滚轮;以及控制器;所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作;本发明先计算装载物品后的总负重,然后依据总负重确定电磁铁的工作电流,从而使得产品更加稳定工作。
具有防坠落装置的磁吸式爬壁机器人.pdf
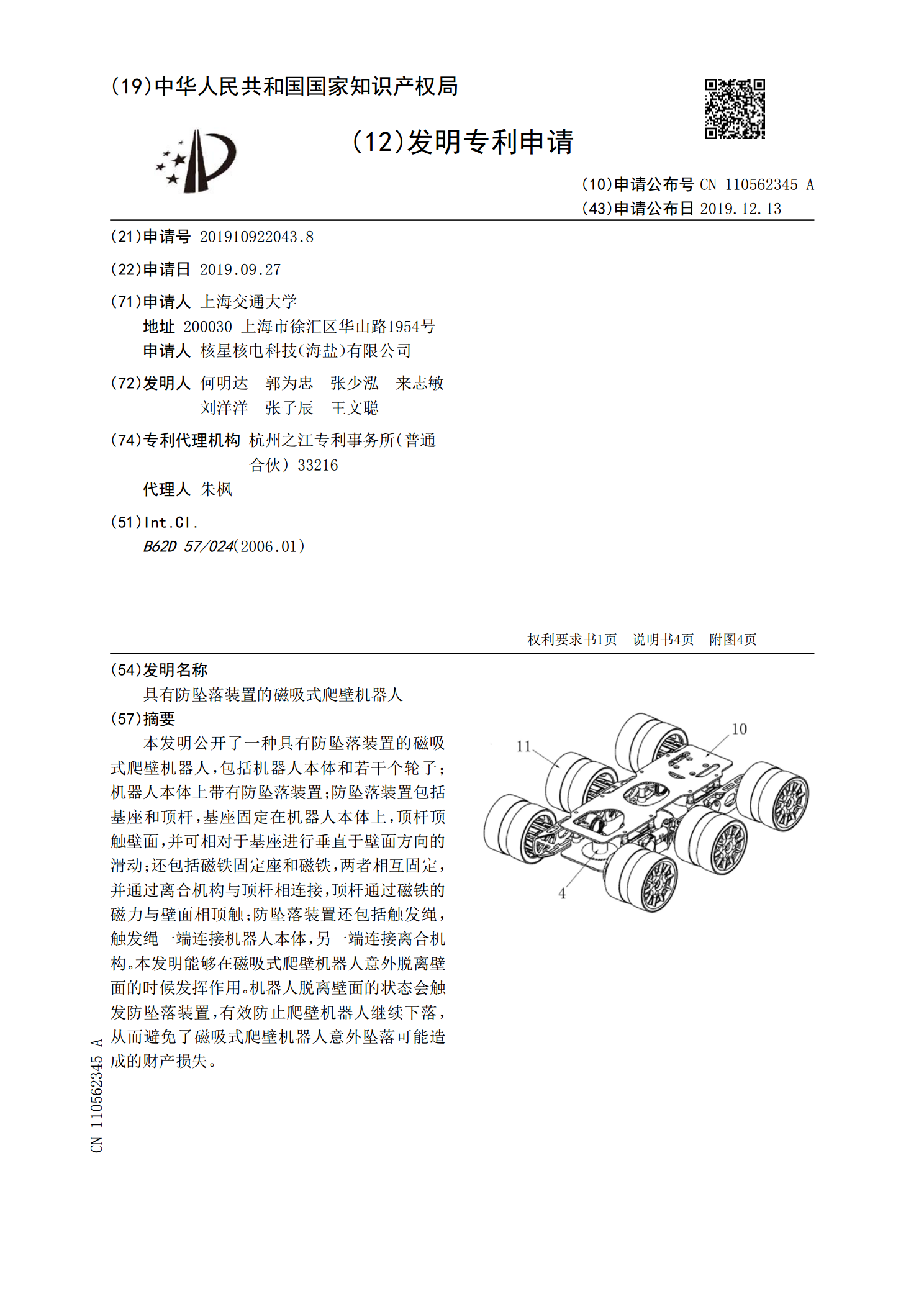
本发明公开了一种具有防坠落装置的磁吸式爬壁机器人,包括机器人本体和若干个轮子;机器人本体上带有防坠落装置;防坠落装置包括基座和顶杆,基座固定在机器人本体上,顶杆顶触壁面,并可相对于基座进行垂直于壁面方向的滑动;还包括磁铁固定座和磁铁,两者相互固定,并通过离合机构与顶杆相连接,顶杆通过磁铁的磁力与壁面相顶触;防坠落装置还包括触发绳,触发绳一端连接机器人本体,另一端连接离合机构。本发明能够在磁吸式爬壁机器人意外脱离壁面的时候发挥作用。机器人脱离壁面的状态会触发防坠落装置,有效防止爬壁机器人继续下落,从而避免了

一种磁吸轮履式爬壁机器人越障机构.pdf
本发明属于爬壁机器人技术领域,尤其是一种磁吸轮履式爬壁机器人越障机构。所述的越障机构采用永磁体轮与磁性履带相结合的方式,在导磁壁面及壁面上的障碍物上行走时,互相配合运动,运动过程中增大爬壁机器人的吸附力、负重能力和越障能力,也解决了其运动不灵活、不易转向且转向时易划伤导磁壁面的问题。

一种磁吸轮履式爬壁机器人越障机构.pdf
本发明属于爬壁机器人技术领域,尤其是一种磁吸轮履式爬壁机器人越障机构。本发明采用履带式和轮式运动机构结合起来,在导磁壁面及壁面上的障碍物上行走时,互相配合运动,运动过程中,增大了爬壁机器人的吸附力、负重能力和越障能力,增强了其行走越过障碍的安全性和灵活性,提高了工作效率,节约了工作成本。
一种爬壁式机器人及其工作方法.pdf
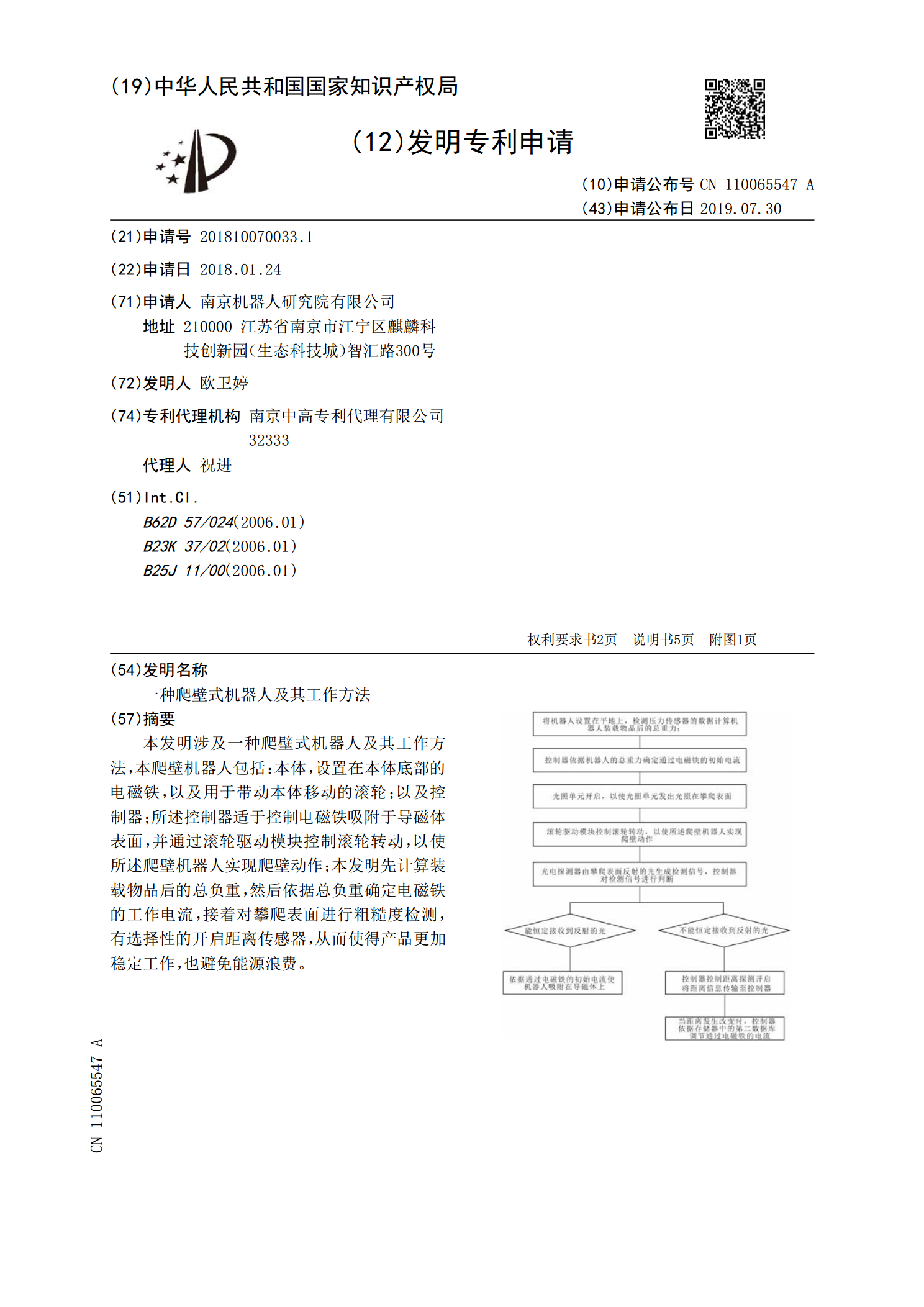
本发明涉及一种爬壁式机器人及其工作方法,本爬壁机器人包括:本体,设置在本体底部的电磁铁,以及用于带动本体移动的滚轮;以及控制器;所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作;本发明先计算装载物品后的总负重,然后依据总负重确定电磁铁的工作电流,接着对攀爬表面进行粗糙度检测,有选择性的开启距离传感器,从而使得产品更加稳定工作,也避免能源浪费。