
船舶除锈爬壁机器人.pdf

猫巷****雪凝


1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

船舶除锈爬壁机器人.pdf
本发明属于爬壁机器人技术领域,尤其涉及一种船舶除锈爬壁机器人,包括机架、驱动机构、真空清洗机构和吸附行走机构;吸附行走机构包括安装于机架的侧部的主动磁轮组和从动磁轮组及皮带组;驱动机构驱动主动磁轮组和从动磁轮组转动;真空清洗机构包括水射流冲洗机构、浮动机构、真空罩和橡胶皮囊,真空罩与机架连接并位于机架中部的下方,水射流冲洗机构安装于真空罩上,橡胶皮囊连接于真空罩的周缘,浮动机构连接于橡胶皮囊与真空罩的顶部之间以带动橡胶皮囊上下运动。本发明的船舶除锈爬壁机器人,大幅提高了船舶除锈爬壁机器人的吸附能力和越障能

船舶除锈爬壁机器人.pdf
本发明适用于爬壁机器人技术领域,提供了一种船舶除锈爬壁机器人,旨在解决现有技术中船舶除锈爬壁机器人越障能力差的技术问题。该船舶除锈爬壁机器人包括清洗盘、与船舶壁面接触的履带、驱动组件、具有从动轮的从动浮动组件、安带动清洗盘相对船舶壁面自动上下运动的浮动连接组件以及提供预压力以压紧履带的压紧组件。该船舶除锈爬壁机器人利用驱动件驱动主动轮以带动从动轮运动,从而带动履带在船舶壁面上行走;于行走过程中遇到障碍物时,利用浮动连接组件带动清洗盘越过障碍物,同时,履带的内拉力增大,使得主动轮与从动轮之间的中心距减小以使

爬壁除锈机器人.pdf
本发明提供一种爬壁除锈机器人,用于船舶、大型钢制容器罐表面的除锈清洁工作。所述的机器人包括行走机构、吸附机构、驱动机构以及远程遥控系统,所述的行走机构包括皮带、主动轮、万向轮,所述的吸附机构主要由永磁铁组成,所述的驱动机构包括驱动电机、减速器以及蜗轮蜗杆减速器,所述的远程遥控系统包括图像传输系统以及遥控系统。所述的机器人通过吸附机构垂直吸附在工作壁面上,驱动电机经过减速器以及蜗轮蜗杆减速器驱动主动轮行走,远程遥控系统的作用在于能够远距离检测作业效果并进行实时控制。本发明具有操作方便、工作效率高的优点。
一种面向船舶除锈的高越障能力爬壁机器人.pdf
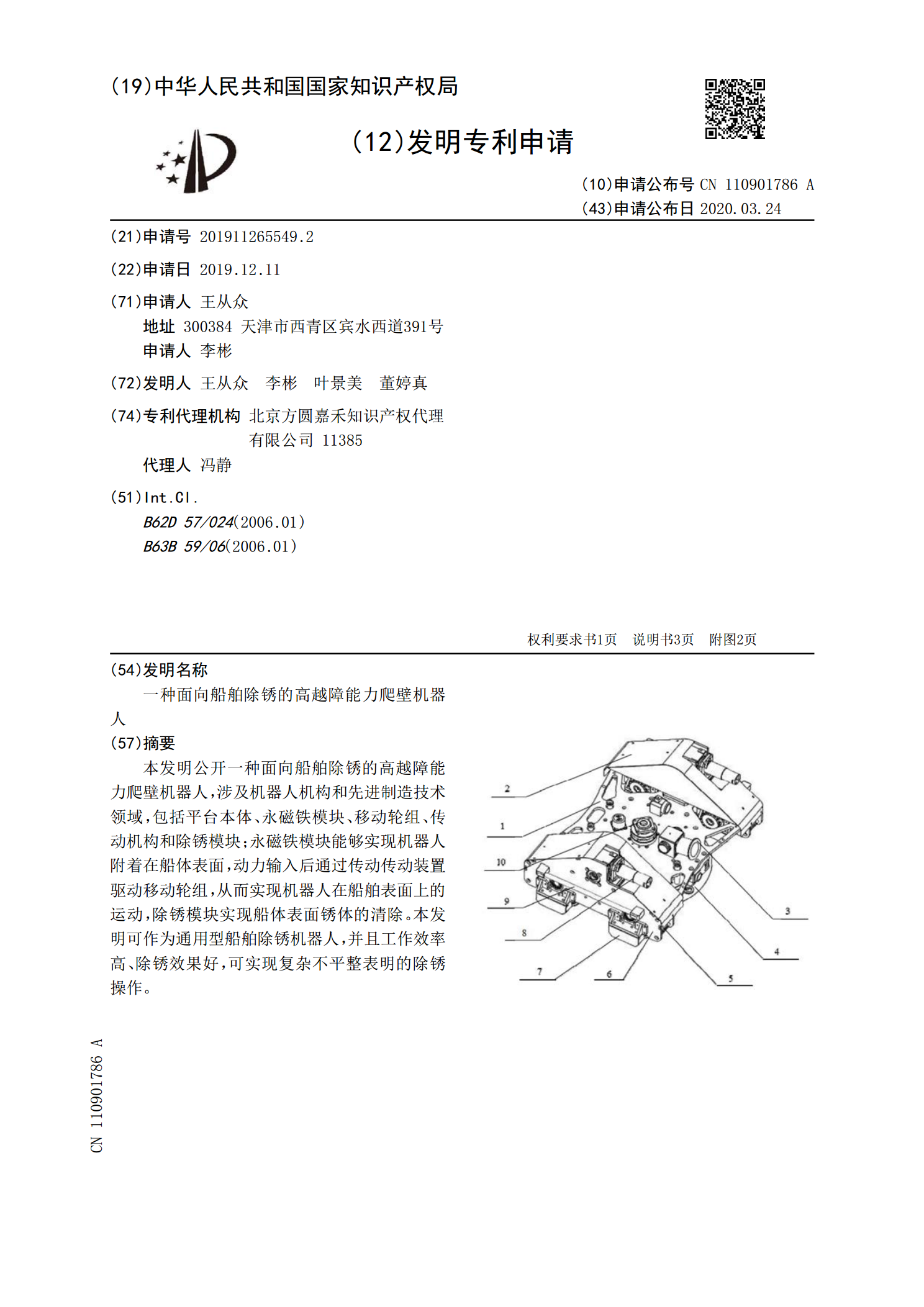
本发明公开一种面向船舶除锈的高越障能力爬壁机器人,涉及机器人机构和先进制造技术领域,包括平台本体、永磁铁模块、移动轮组、传动机构和除锈模块;永磁铁模块能够实现机器人附着在船体表面,动力输入后通过传动传动装置驱动移动轮组,从而实现机器人在船舶表面上的运动,除锈模块实现船体表面锈体的清除。本发明可作为通用型船舶除锈机器人,并且工作效率高、除锈效果好,可实现复杂不平整表明的除锈操作。

履带式船舶除锈爬壁机器人设计及分析的任务书.docx
履带式船舶除锈爬壁机器人设计及分析的任务书任务书任务名称:履带式船舶除锈爬壁机器人设计及分析任务目的:本任务旨在开发一款可以在船壳表面进行除锈的机器人,能够自动最大限度地覆盖船体表面,提高清洁效率和质量。该机器人应该具有良好的可靠性和适应性,并可以适应各种外部环境(如吹风、水雾等),方便快速地执行除锈任务。任务描述:设计一款履带式船舶除锈爬壁机器人,使用该机器人进行船体表面的自动除锈。为了使机器人能够尽可能覆盖船体表面,必须具有完善的移动系统,并且应能够旋转和转动,以涵盖所有表面。该机器人的电力系统和运行