
一种折叠行李箱.pdf

雨巷****碧易

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种折叠行李箱.pdf
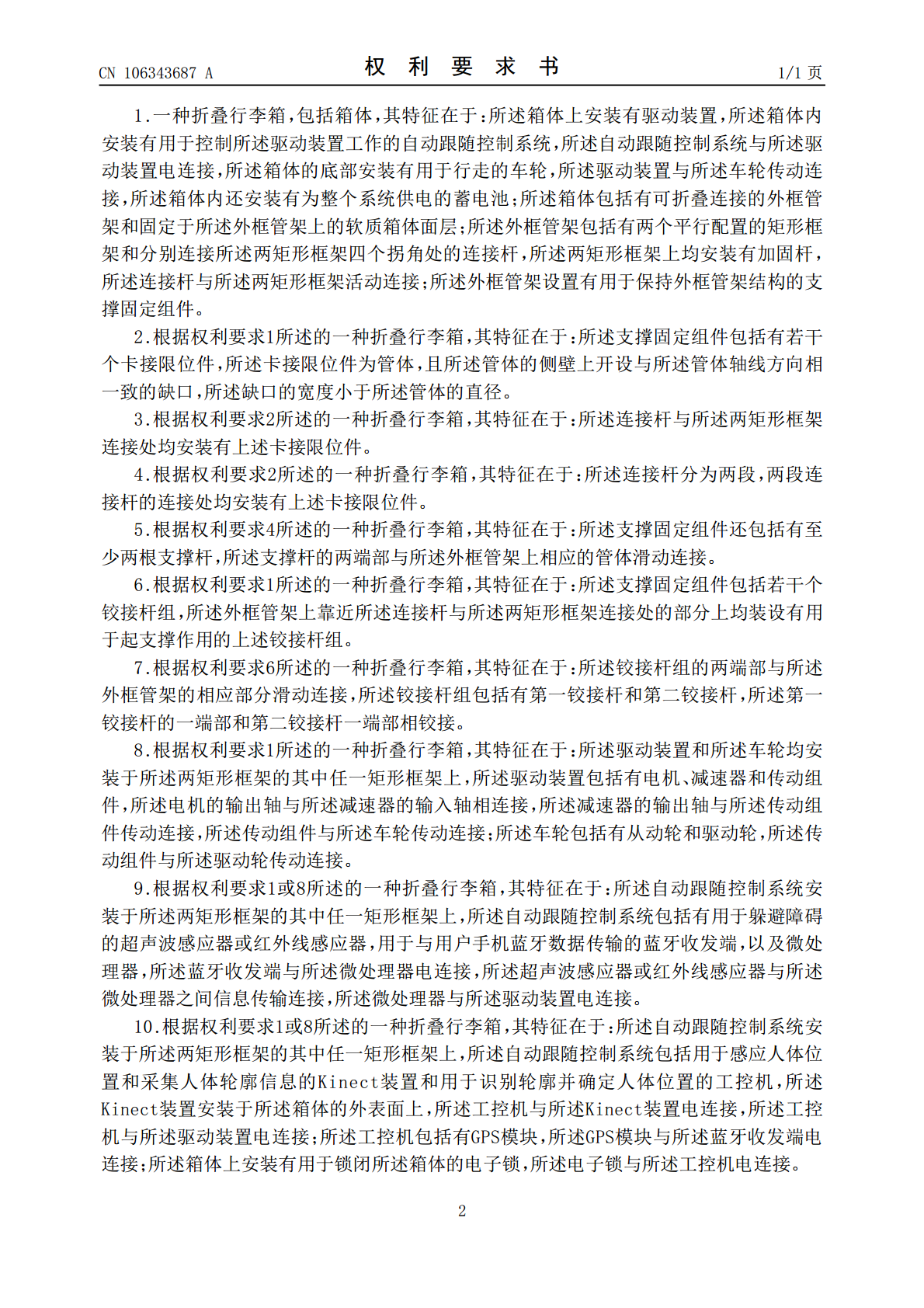
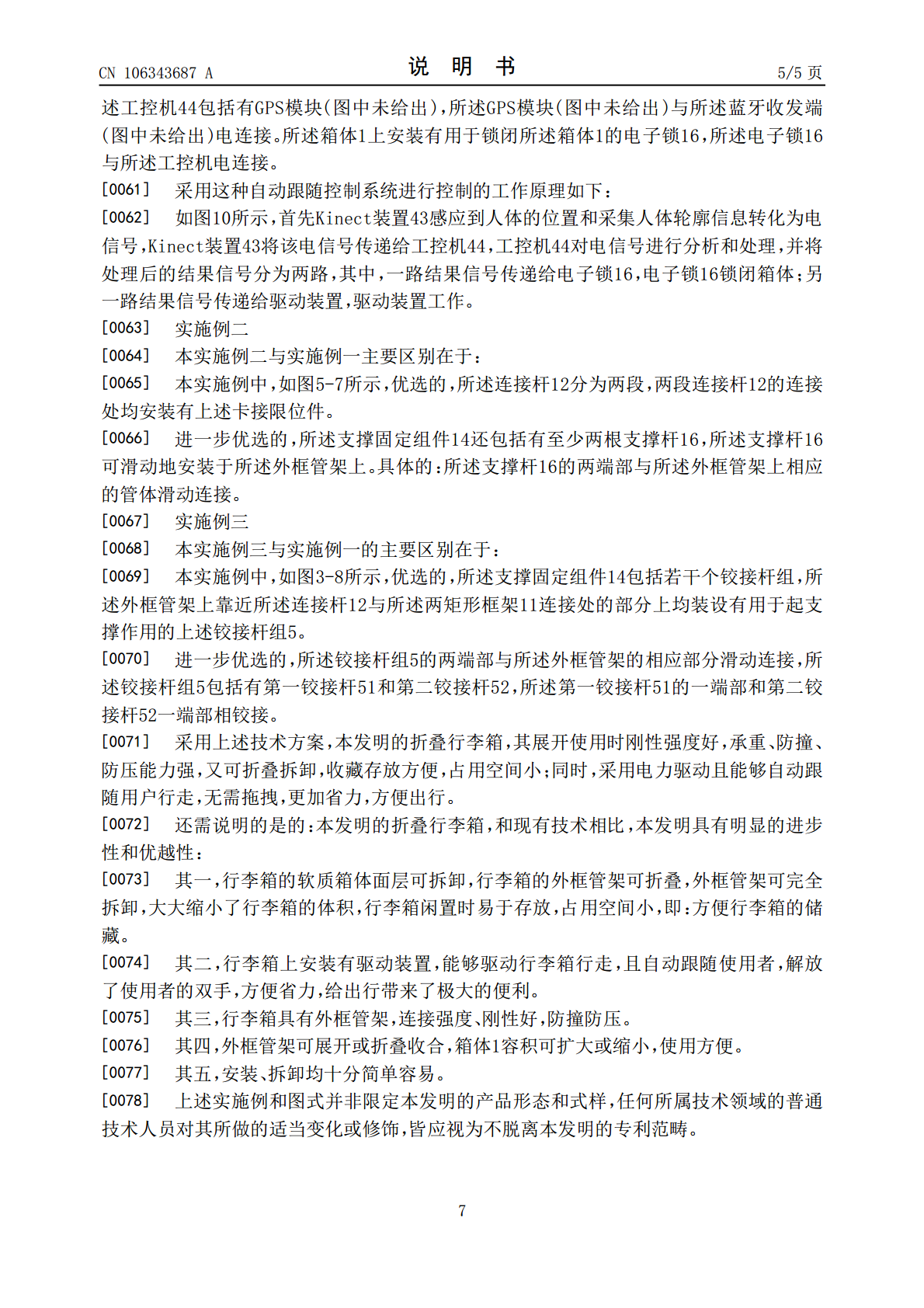
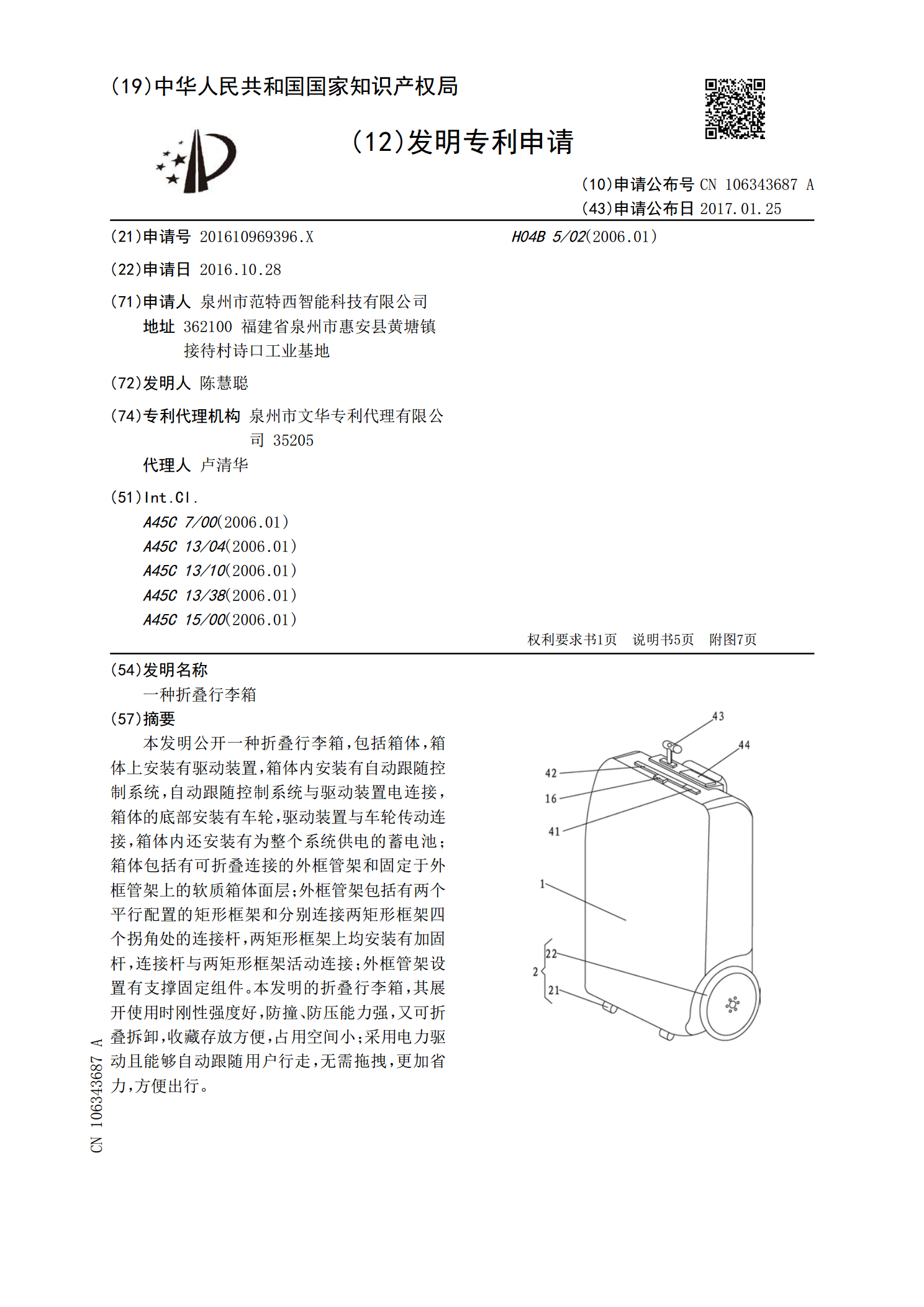
本发明公开一种折叠行李箱,包括箱体,箱体上安装有驱动装置,箱体内安装有自动跟随控制系统,自动跟随控制系统与驱动装置电连接,箱体的底部安装有车轮,驱动装置与车轮传动连接,箱体内还安装有为整个系统供电的蓄电池;箱体包括有可折叠连接的外框管架和固定于外框管架上的软质箱体面层;外框管架包括有两个平行配置的矩形框架和分别连接两矩形框架四个拐角处的连接杆,两矩形框架上均安装有加固杆,连接杆与两矩形框架活动连接;外框管架设置有支撑固定组件。本发明的折叠行李箱,其展开使用时刚性强度好,防撞、防压能力强,又可折叠拆卸,收藏

一种折叠踏板行李箱.pdf
本发明涉及一种行李箱,尤其涉及一种折叠踏板行李箱。技术问题:提供一种能够方便、快捷的运送行李、能够提高运送效率、能够降低劳动强度的折叠踏板行李箱。技术方案如下:一种折叠踏板行李箱,包括有铝合金箱体、第一车轮、壳体、第二车轮、缓冲装置等;铝合金箱体的底部左侧设有第一车轮,铝合金箱体的右侧面下部连接有壳体,壳体的底部设有第二车轮,壳体的下部开有矩形凹槽,壳体的上部开有滑槽,滑槽与矩形凹槽之间的壳体上转动式连接有弯曲踏板。本发明通过用户站在弯曲踏板上,并用脚在地面上滑动,如此通过第一车轮和第三车轮能够使本发明方
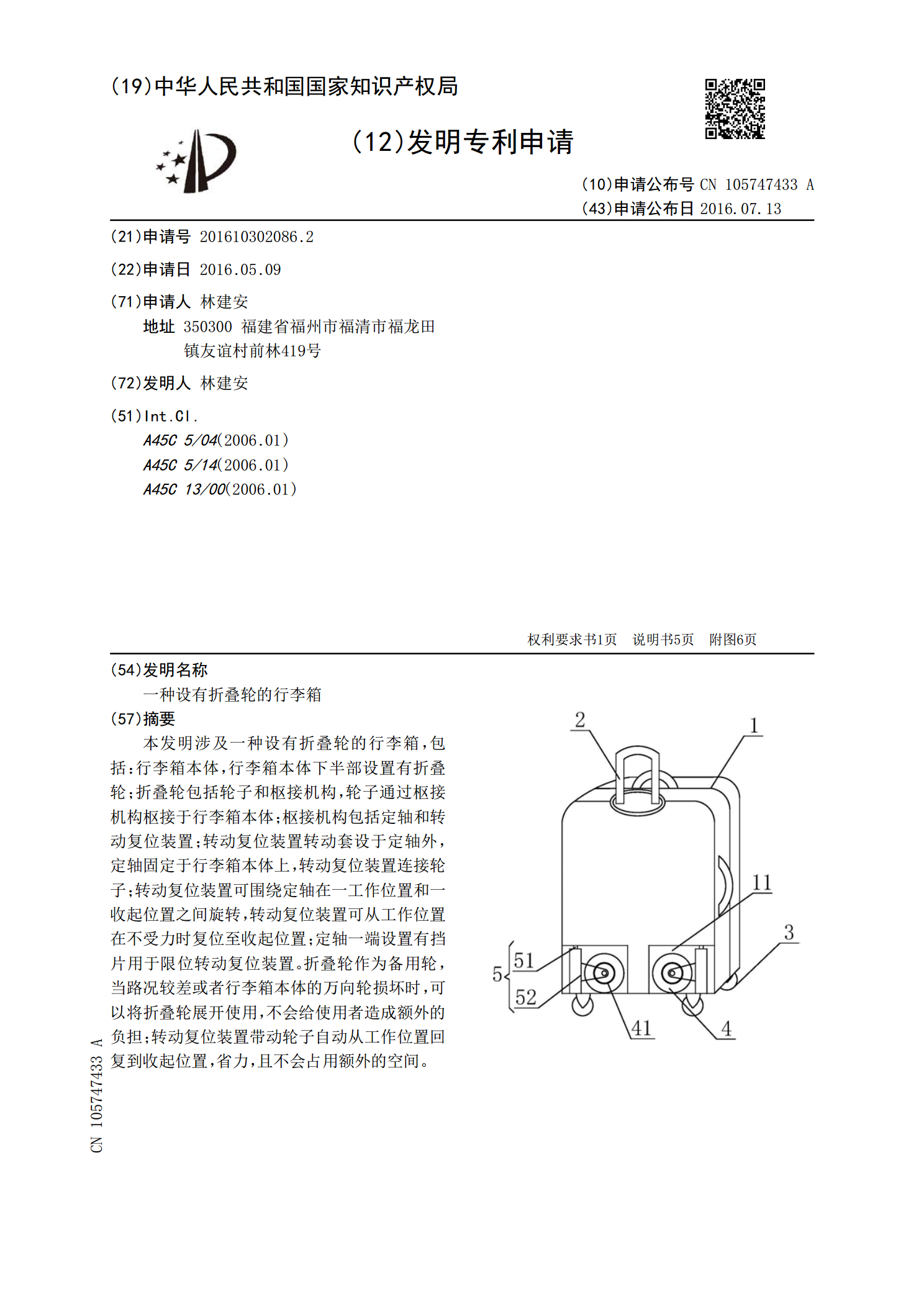
一种设有折叠轮的行李箱.pdf
本发明涉及一种设有折叠轮的行李箱,包括:行李箱本体,行李箱本体下半部设置有折叠轮;折叠轮包括轮子和枢接机构,轮子通过枢接机构枢接于行李箱本体;枢接机构包括定轴和转动复位装置;转动复位装置转动套设于定轴外,定轴固定于行李箱本体上,转动复位装置连接轮子;转动复位装置可围绕定轴在一工作位置和一收起位置之间旋转,转动复位装置可从工作位置在不受力时复位至收起位置;定轴一端设置有挡片用于限位转动复位装置。折叠轮作为备用轮,当路况较差或者行李箱本体的万向轮损坏时,可以将折叠轮展开使用,不会给使用者造成额外的负担;转动复
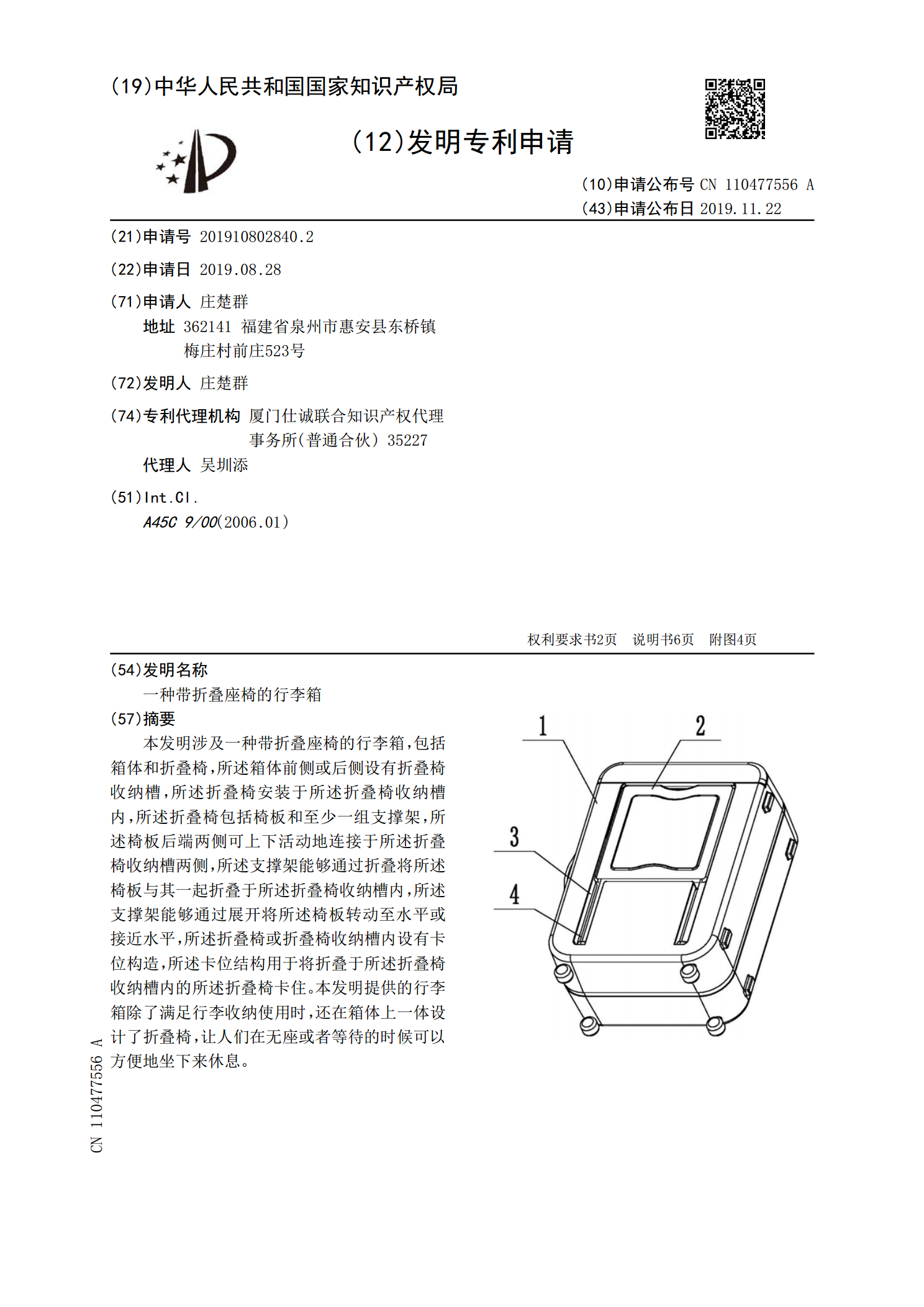
一种带折叠座椅的行李箱.pdf
本发明涉及一种带折叠座椅的行李箱,包括箱体和折叠椅,所述箱体前侧或后侧设有折叠椅收纳槽,所述折叠椅安装于所述折叠椅收纳槽内,所述折叠椅包括椅板和至少一组支撑架,所述椅板后端两侧可上下活动地连接于所述折叠椅收纳槽两侧,所述支撑架能够通过折叠将所述椅板与其一起折叠于所述折叠椅收纳槽内,所述支撑架能够通过展开将所述椅板转动至水平或接近水平,所述折叠椅或折叠椅收纳槽内设有卡位构造,所述卡位结构用于将折叠于所述折叠椅收纳槽内的所述折叠椅卡住。本发明提供的行李箱除了满足行李收纳使用时,还在箱体上一体设计了折叠椅,让人
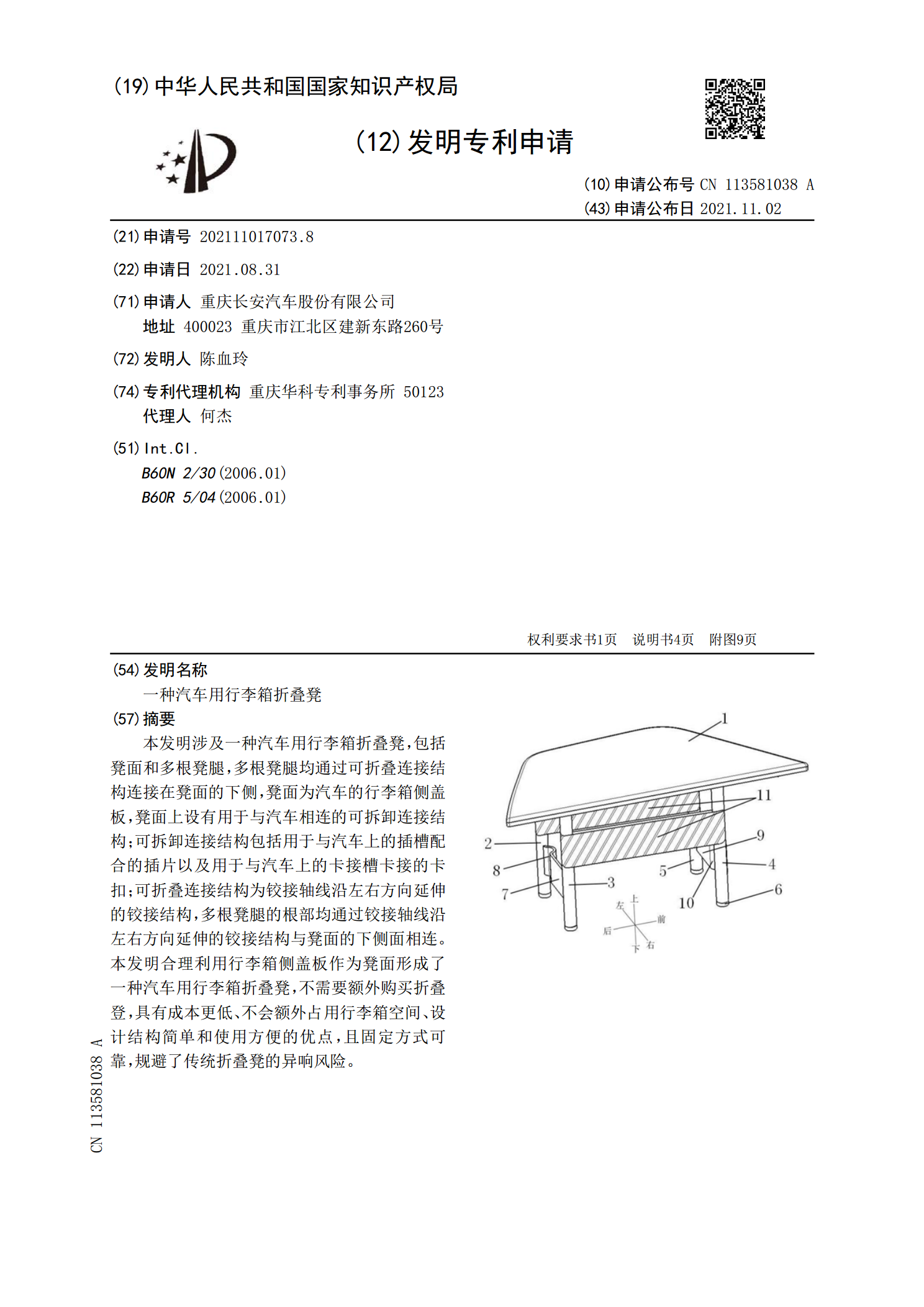
一种汽车用行李箱折叠凳.pdf
本发明涉及一种汽车用行李箱折叠凳,包括凳面和多根凳腿,多根凳腿均通过可折叠连接结构连接在凳面的下侧,凳面为汽车的行李箱侧盖板,凳面上设有用于与汽车相连的可拆卸连接结构;可拆卸连接结构包括用于与汽车上的插槽配合的插片以及用于与汽车上的卡接槽卡接的卡扣;可折叠连接结构为铰接轴线沿左右方向延伸的铰接结构,多根凳腿的根部均通过铰接轴线沿左右方向延伸的铰接结构与凳面的下侧面相连。本发明合理利用行李箱侧盖板作为凳面形成了一种汽车用行李箱折叠凳,不需要额外购买折叠登,具有成本更低、不会额外占用行李箱空间、设计结构简单和