
一种四轮独立驱动电动汽车的协调控制方法.pdf

丹烟****魔王

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种四轮独立驱动电动汽车的协调控制方法.pdf
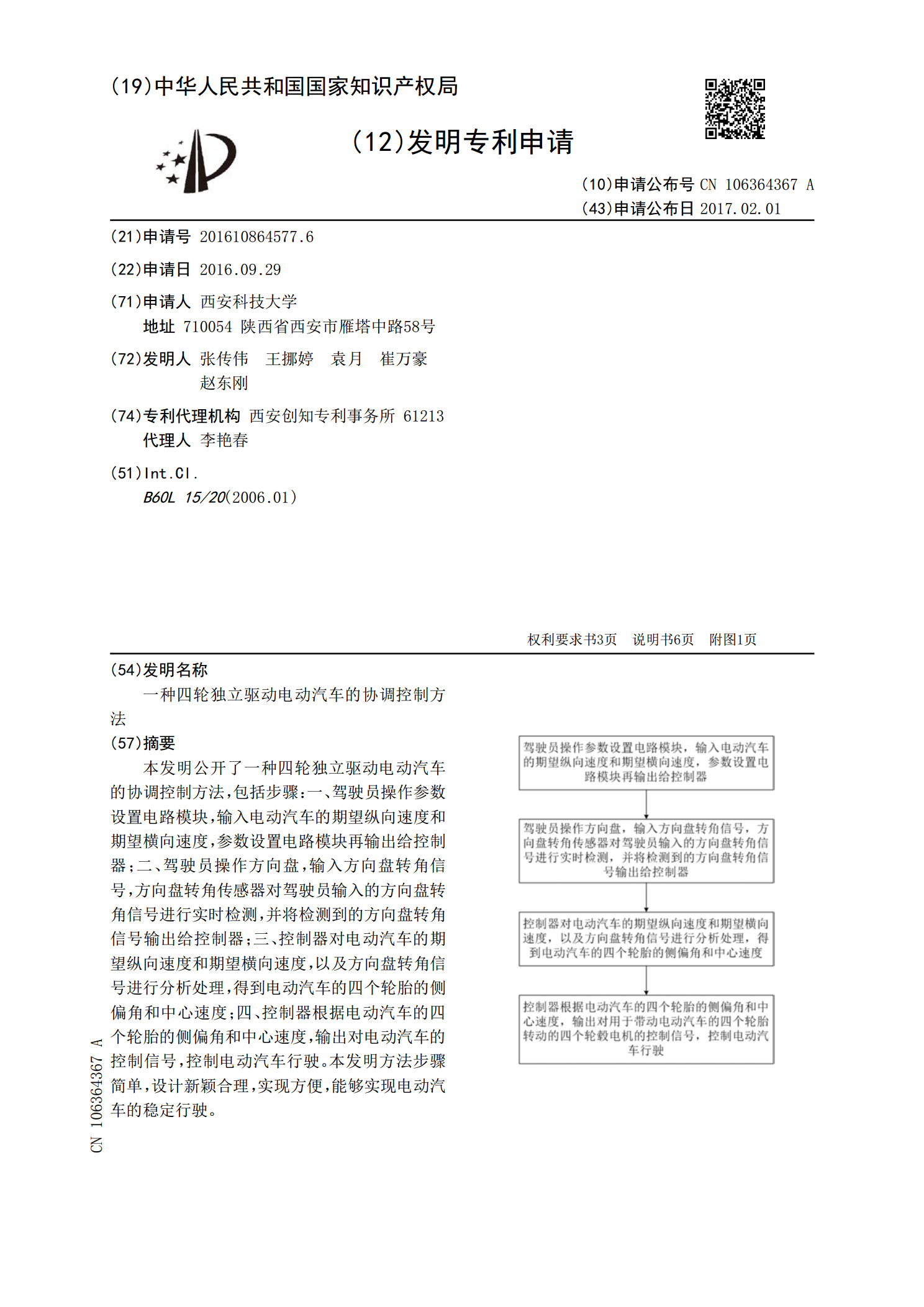
本发明公开了一种四轮独立驱动电动汽车的协调控制方法,包括步骤:一、驾驶员操作参数设置电路模块,输入电动汽车的期望纵向速度和期望横向速度,参数设置电路模块再输出给控制器;二、驾驶员操作方向盘,输入方向盘转角信号,方向盘转角传感器对驾驶员输入的方向盘转角信号进行实时检测,并将检测到的方向盘转角信号输出给控制器;三、控制器对电动汽车的期望纵向速度和期望横向速度,以及方向盘转角信号进行分析处理,得到电动汽车的四个轮胎的侧偏角和中心速度;四、控制器根据电动汽车的四个轮胎的侧偏角和中心速度,输出对电动汽车的控制信号,

一种四轮独立驱动、独立转向电动汽车协调控制系统.pdf
一种四轮独立驱动、独立转向电动汽车协调控制系统,包括依次相连的全局信号反馈模块、整车控制模块、协调控制模块和电机控制模块;所述整车控制模块包括整车控制器以及与整车控制器相连的电池管理系统、车载照明装置、制冷与制热装置。本发明中由于设置协调控制器,可以避免整车控制器设计过于复杂,提高整车控制器、协调控制器和电机控制器的实时响应速度及运行可靠性。协调控制器提高了四轮独立驱动、独立转向电动汽车能量的利用效率和驾驶舒适性,并提高驾驶的安全性。实现了更为科学的模块式控制,有利于电动汽车的模块化生产,促进了电动汽车控

一种四轮独立驱动电动汽车协同控制方法.pdf
本发明公开了一种基于CPS的电动汽车四轮独立驱动协同控制方法,包括ECU、SR电机驱动系统、车载电池组和通讯网络;所述的四个SR电机驱动控制系统和ECU均由车载电池组供电;ECU通过通讯网络分别与四个电机控制器进行通讯。ECU为控制网络核心,它将各子控制器以及各传感器的信息进行汇总分析,并将执行指令发送各电机控制器,电机控制器控制SR电机进行转速和转矩的输出。该系统从CPS出发,对整车进行实时在环反馈控制,驱动转矩分配策略采用基于滑移率和横摆力矩的模糊控制,SR电机控制采用自适应模糊控制算法。本发明的优点

一种四轮独立驱动电动汽车的车身稳定控制方法.pdf
本发明公开了一种四轮独立驱动电动汽车车身稳定控制方法,通过汽车线性二自由度操纵模型获得横摆角速度期望值,质心侧偏角期望值设为0后,通过基于自抗扰控制理论,分别设计横摆角速度偏差自抗扰控制器和质心侧偏角偏差自抗扰控制器,得到附加横摆力矩ΔM

各轮独立转向及驱动的电动汽车及其转向与驱动控制方法.pdf
一种各轮独立转向及驱动的电动汽车及其转向与驱动方法,该电动汽车包括车身、悬架系统、车轮转向系统、若干个车轮总成及驱动控制系统。车轮转向系统包括转向操纵装置、转向控制子系统及数量与车轮总成相同且通过悬架系统装于车身上的转向机构,悬架系统外侧及前后两端留有避位空间,各转向机构包括主销杆及车轮轴,转向控制子系统包括转向控制器、设于主销杆顶端且与主销杆传动连接的转向舵机及转向传感器;各车轮总成包括装于车轮轴上的车轮及轮毂电机;驱动控制系统包括车速控制踏板及控制轮毂电机的驱动控制器。本发明在各车轮处均装有转向舵机及