
基于轮毂电机和磁编码器的穿梭车控制系统及其方法.pdf

书生****12


1/8
2/8
3/8
4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于轮毂电机和磁编码器的穿梭车控制系统及其方法.pdf
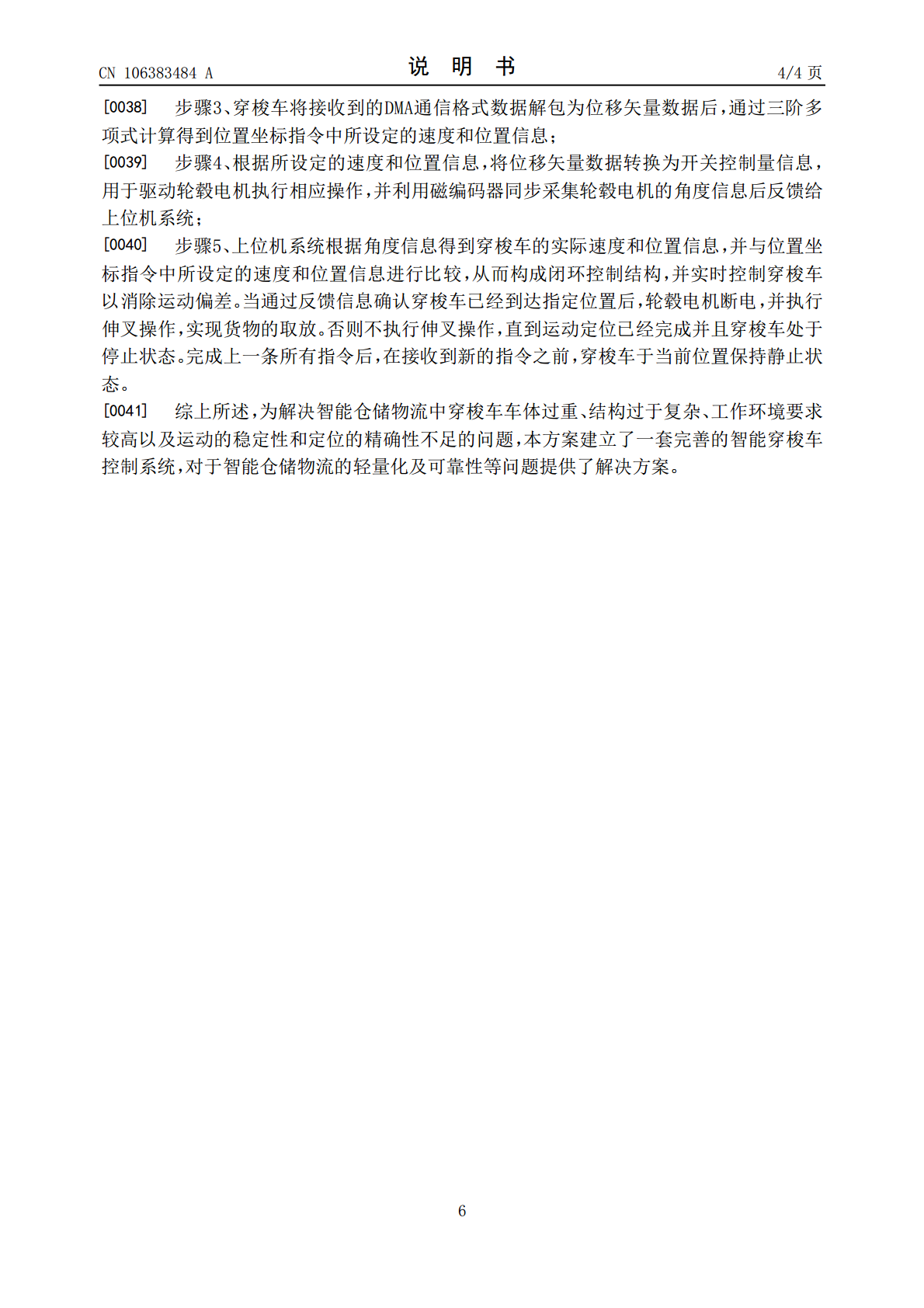
本发明公开了一种基于轮毂电机和磁编码器的穿梭车控制系统及其方法,其特征包括:由中央数据处理模块、主通信模块和显示操作模块构成的上位机控制系统,以及由从通信模块、驱动控制模块和运动执行模块构成的穿梭车执行系统;驱动控制模块包括:数据处理单元和驱动控制电路;运动执行模块是由轮毂电机及固定于轮毂电机轴上的磁编码器组成。本发明能在减轻穿梭车本体重量以及使穿梭车结构更紧凑的前提下,保证相应的运货能力并提高穿梭车的定位精度。

一种基于环形磁编码器的高精度速度反馈轮毂电机.pdf
本发明提出一种基于环形磁编码器的高精度速度反馈轮毂电机,包括定子、轮毂、电机控制板、磁编码器安装座、磁编码器、小磁铁、磁铁基座、环形磁铁、磁轭、永磁体、主轴和端盖,其中主轴与轮毂转动连接,定子与主轴固定安装,电机控制板与定子固定安装,磁编码器与磁编码器安装座固定安装,磁编码器安装座与主轴固定安装,小磁铁与环形磁铁固定安装在磁铁基座上,并与磁编码器相匹配,所述磁编码器安装座与轮毂固定安装,所述永磁体与磁轭固定安装,并与定子相匹配,所述磁轭与轮毂固定安装,所述端盖与轮毂固定安装。本发明在基本不增加轮毂电机体积
人机互动体感车的轮毂电机控制系统及其控制方法.pdf
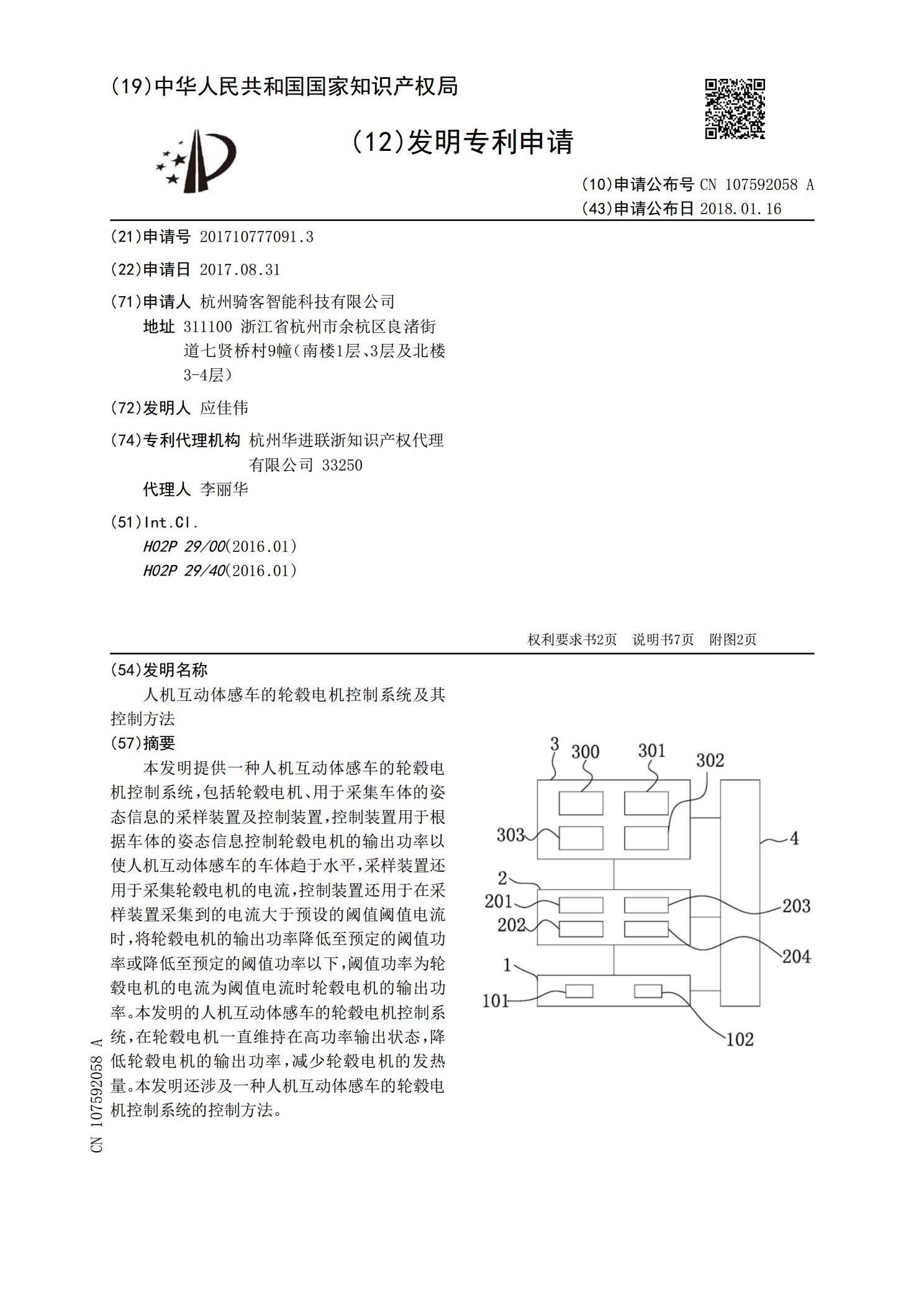
本发明提供一种人机互动体感车的轮毂电机控制系统,包括轮毂电机、用于采集车体的姿态信息的采样装置及控制装置,控制装置用于根据车体的姿态信息控制轮毂电机的输出功率以使人机互动体感车的车体趋于水平,采样装置还用于采集轮毂电机的电流,控制装置还用于在采样装置采集到的电流大于预设的阈值阈值电流时,将轮毂电机的输出功率降低至预定的阈值功率或降低至预定的阈值功率以下,阈值功率为轮毂电机的电流为阈值电流时轮毂电机的输出功率。本发明的人机互动体感车的轮毂电机控制系统,在轮毂电机一直维持在高功率输出状态,降低轮毂电机的输出功

电动车及其车用集成式轮毂电机、轮毂电机的使用方法.pdf
本发明涉及一种集成式轮毂电机,包括轮毂外壳、贯穿轮毂外壳的转轴,轮毂外壳内集成安装有:盘式电机,包括相互配合的定子和转子,转子套设在转轴上;减速器,包括若干相互啮合联动的齿轮,套设在转轴上,且与盘式电机联动;超越离合器,与减速器相连,套设在转轴上;所述轮毂外壳上设有注油孔。本发明将盘式电机和减速器集成在轮毂内,相较于传统电机,本发明的轮毂电机体积明显变小,便于安装使用;油液起到润滑作用;轮毂外壳作为散热面,提高了冷却效果;圆锥滚子轴承具有抵抗磁钢的磁吸力的作用,在体积缩小的前提下,其它性能至少不变,甚至散
轮毂电机的控制系统和控制方法.pdf
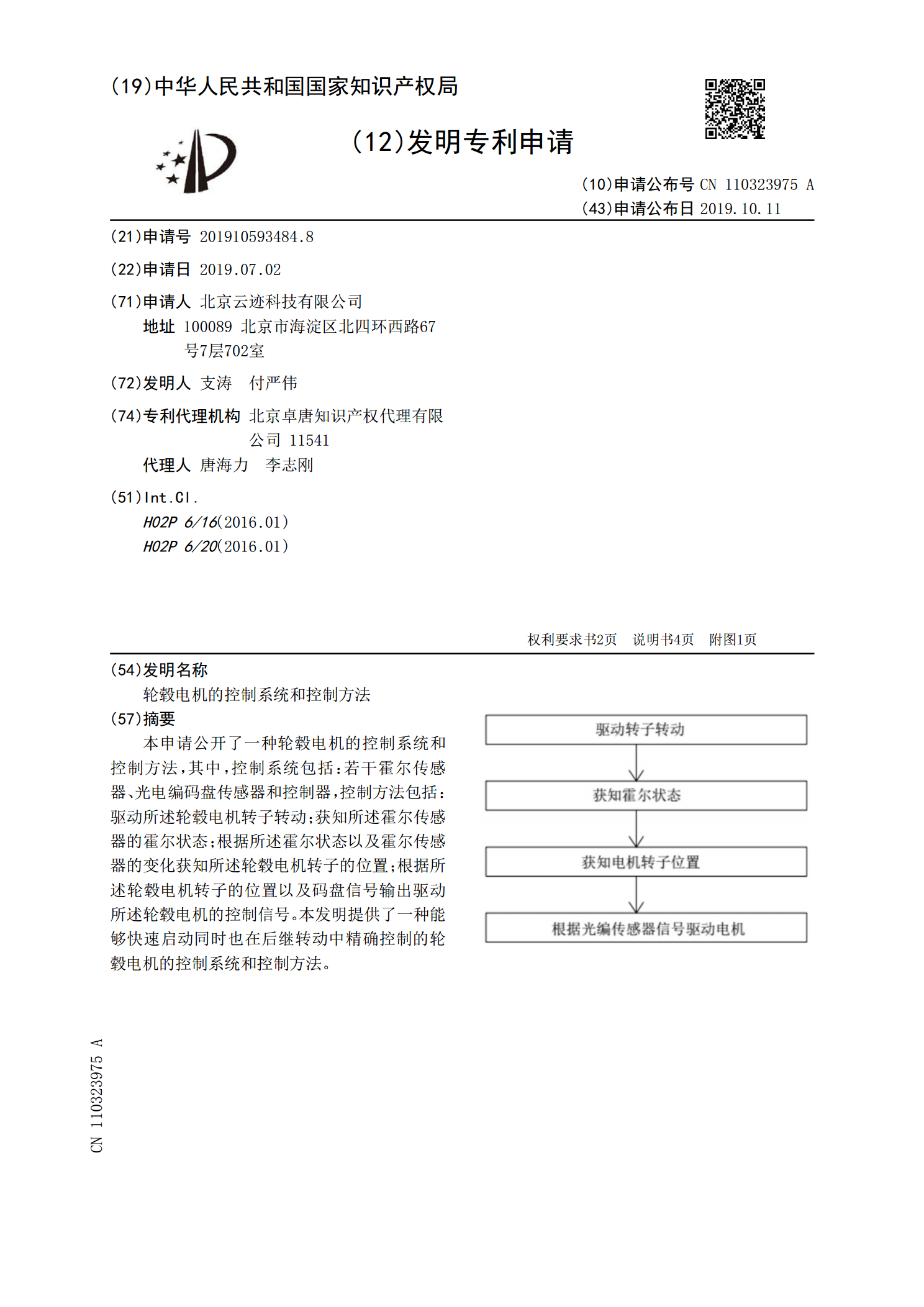
本申请公开了一种轮毂电机的控制系统和控制方法,其中,控制系统包括:若干霍尔传感器、光电编码盘传感器和控制器,控制方法包括:驱动所述轮毂电机转子转动;获知所述霍尔传感器的霍尔状态;根据所述霍尔状态以及霍尔传感器的变化获知所述轮毂电机转子的位置;根据所述轮毂电机转子的位置以及码盘信号输出驱动所述轮毂电机的控制信号。本发明提供了一种能够快速启动同时也在后继转动中精确控制的轮毂电机的控制系统和控制方法。