
基于轮廓点混合特征匹配的空间目标姿态估计方法.pdf

慧娇****文章


1/9

2/9
3/9

4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于轮廓点混合特征匹配的空间目标姿态估计方法.pdf
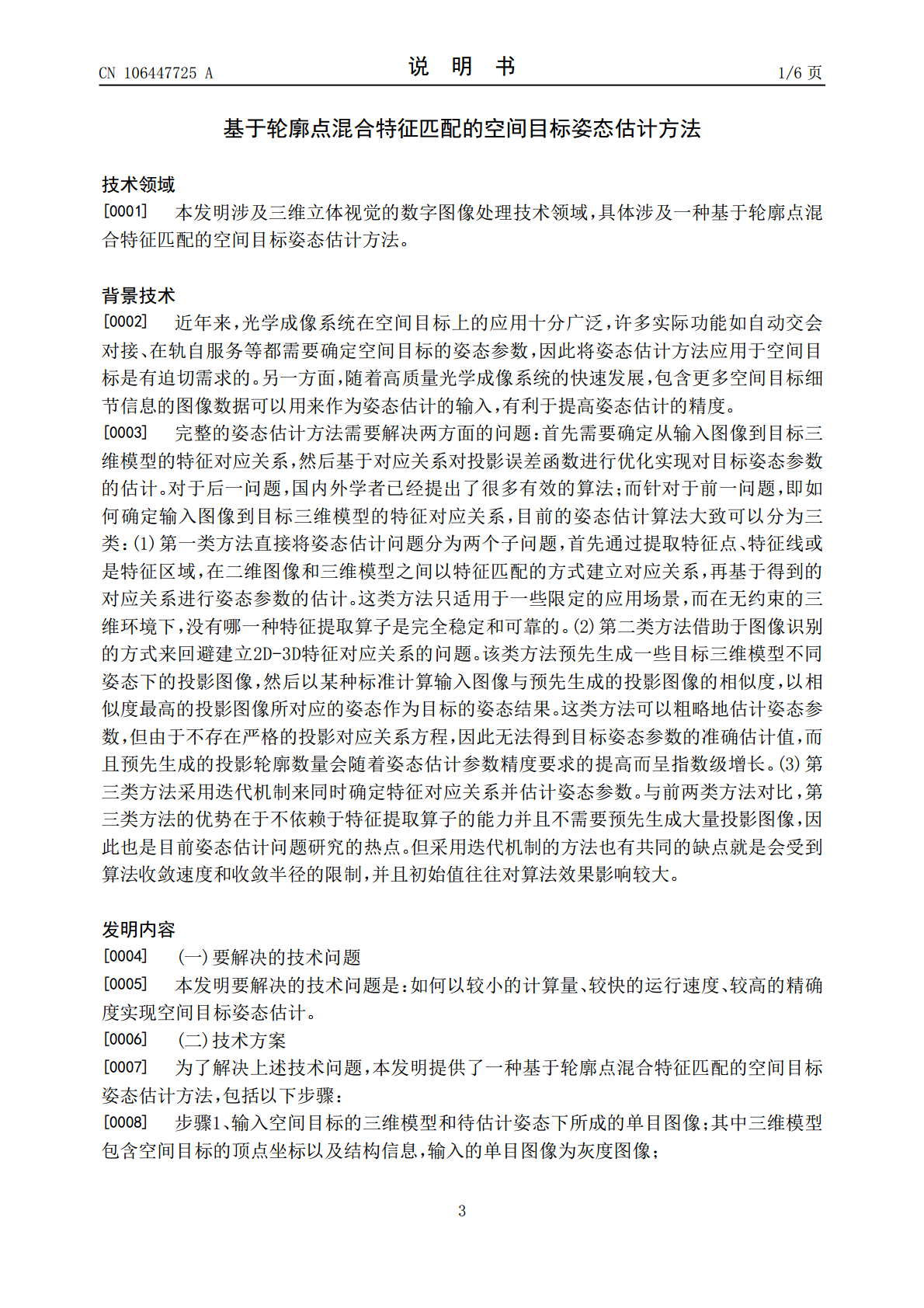
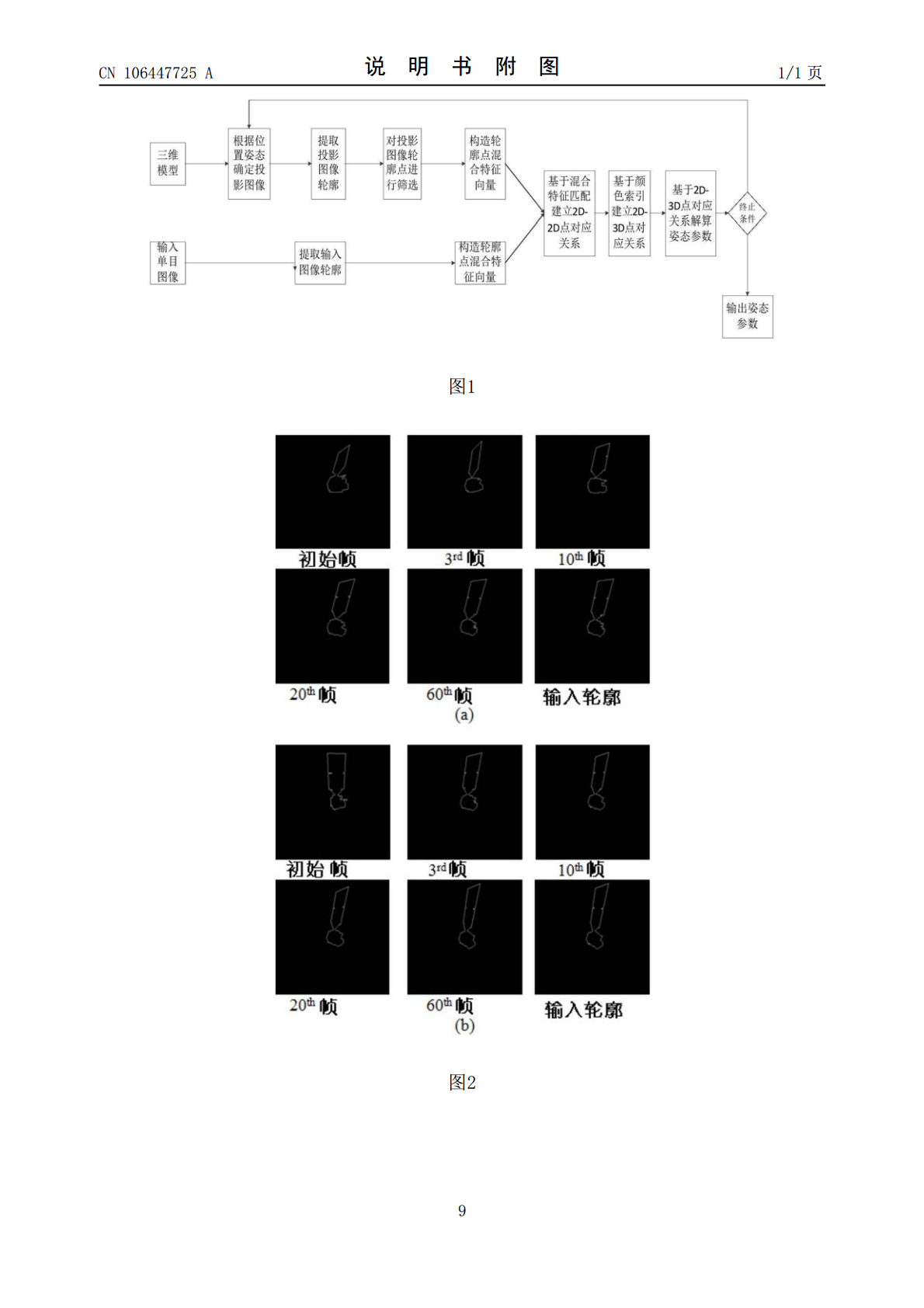
本发明涉及一种基于轮廓点混合特征匹配的空间目标姿态估计方法,属于数字图像处理技术领域。本发明在三维模型先验的基础上,充分利用投影图像轮廓中所包含的数据信息,利用混合特征匹配建立从输入图像到目标三维模型的2D‑3D特征对应关系,并通过迭代的方式同步完成特征对应关系的确定和目标三维姿态参数的估计。通过构造轮廓点的混合特征向量并调整位置分量与曲率分量的权重系数,更准确地反映特征空间的结构,从而提高了算法的适用范围,即便初始姿态与真实姿态相差较大,算法依然具有较高的精确性;对投影图像轮廓点进行筛选,减小计算复杂度

一种基于轮廓点ORB特征匹配的无纹理空间目标姿态估计算法.pdf
本发明提供了一种基于轮廓点ORB特征匹配的无纹理空间目标姿态估计算法,属于数字图像处理技术领域。本发明在三维模型先验的基础上,充分利用投影图像轮廓中所包含的数据信息,利用ORB特征匹配和颜色索引建立从输入图像到目标三维模型的2D‑3D特征对应关系,并利用匹配误差构造置信概率矩阵,提出加权的正交投影算法解算无纹理空间目标的六自由度姿态参数。ORB特征提高了轮廓点匹配的准确性并且在初始姿态相对真实姿态有较大偏移的情况下仍具有一定的鲁棒性;本发明充分发掘建立2D‑3D对应关系子问题与解算姿态参数子问题之间的联系

一种基于自旋空间目标模型投影匹配的目标姿态估计方法.pdf
本发明公开了一种基于自旋空间目标模型投影匹配的目标姿态估计方法,包括:获取雷达对自旋空间目标的位置测量信息以及回波数据;基于回波数据在多个子孔径成像平面进行ISAR成像,得到二维ISAR图像序列;利用位置测量信息构建瞬时雷达视线在轨道坐标系下的雷达视线矢量;基于该雷达视线矢量、自旋空间目标的三维模型以及运动规律,构建自旋空间目标在每个子孔径成像平面的投影图像的数学模型;基于数学模型,以最大化二维ISAR图像序列与投影图像序列的相似度为目标、并以自旋空间目标的运动姿态参数为求解参数构建一目标函数;利用粒子群

基于光度频谱特征的空间目标姿态稳定性估计方法及装置.pdf
本发明公开了基于光度频谱特征的空间目标姿态稳定性估计方法及装置;该方法包括:对空间目标的光度数据进行去野值处理,并对处理后的光度数据进行距离归一化处理;根据距离归一化处理后的光度数据,利用多阶多项式拟合光度曲线;利用所述光度曲线消去所述距离归一化处理后的光度数据中对应低频响应分量的趋势项,得到去趋势项后的光度数据;对所述去趋势项后的光度数据进行时频转换,得到当前光度数据的频域响应;根据所述频域响应的峰值与对应的第一阈值的大小关系,和/或,所述频域响应的峰值均值比与对应的第二阈值的大小关系,确定所述空间目标

基于轮廓点空间结构特征的形状匹配方法研究综述报告.docx
基于轮廓点空间结构特征的形状匹配方法研究综述报告随着计算机技术的快速发展和进步,形状匹配已经成为了计算机视觉领域中的一个重要研究方向。尤其是在数字影像处理领域,形状匹配的应用越来越广泛,已经涉及到了自动识别、自动分类、检测和跟踪等多个方面。因此,形状匹配方法的研究也成为了科研领域中的热门话题。目前,关于形状匹配的研究方法有很多种,如基于特征匹配、基于模型匹配、基于轮廓点空间结构的形状匹配方法等。其中,基于轮廓点空间结构的形状匹配方法是一种优秀的方法,它可以准确地描述出形状的轮廓点之间的空间关系,从而使得匹