
一种基于自旋空间目标模型投影匹配的目标姿态估计方法.pdf

醉香****mm

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于自旋空间目标模型投影匹配的目标姿态估计方法.pdf
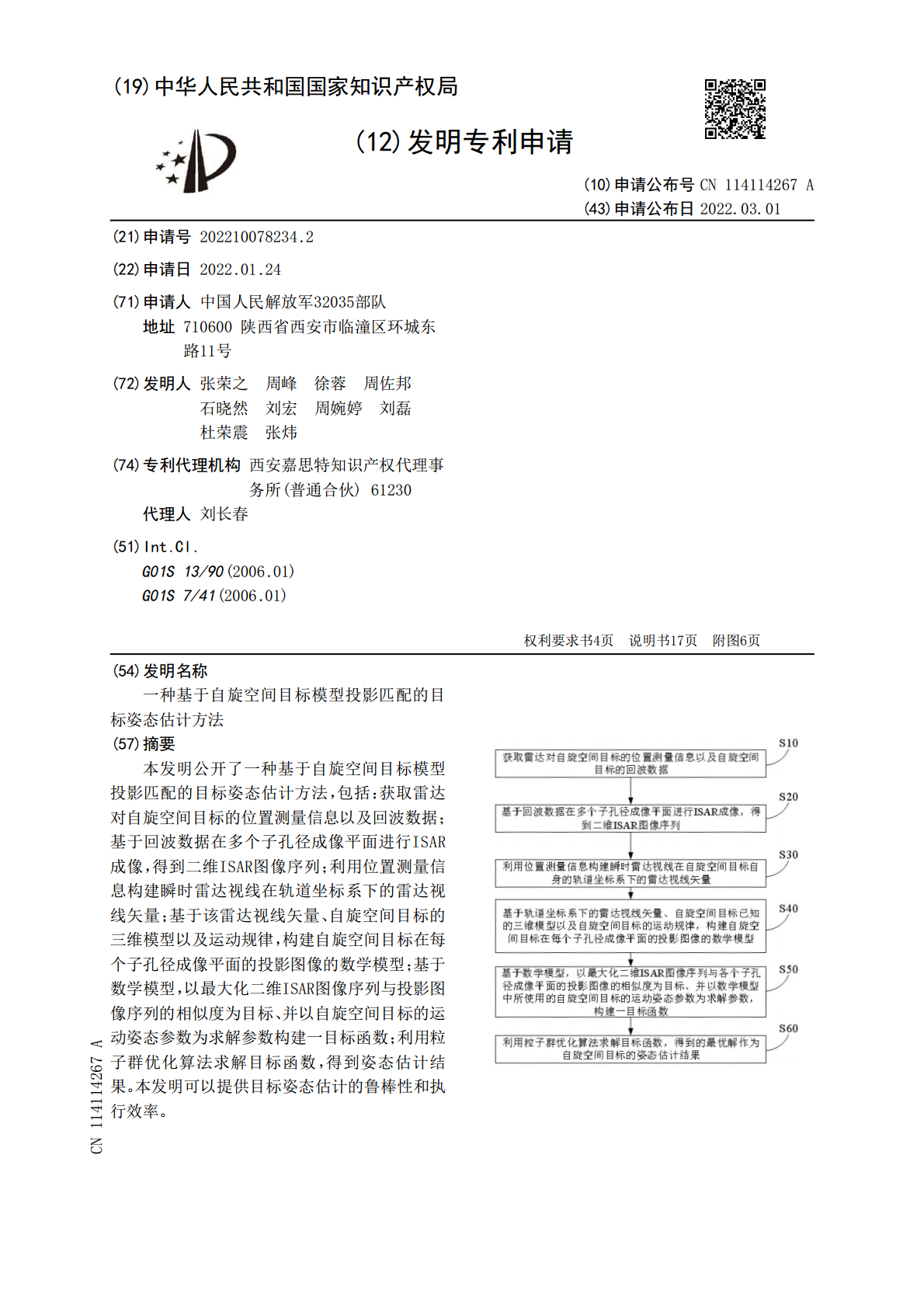
本发明公开了一种基于自旋空间目标模型投影匹配的目标姿态估计方法,包括:获取雷达对自旋空间目标的位置测量信息以及回波数据;基于回波数据在多个子孔径成像平面进行ISAR成像,得到二维ISAR图像序列;利用位置测量信息构建瞬时雷达视线在轨道坐标系下的雷达视线矢量;基于该雷达视线矢量、自旋空间目标的三维模型以及运动规律,构建自旋空间目标在每个子孔径成像平面的投影图像的数学模型;基于数学模型,以最大化二维ISAR图像序列与投影图像序列的相似度为目标、并以自旋空间目标的运动姿态参数为求解参数构建一目标函数;利用粒子群

基于轮廓点混合特征匹配的空间目标姿态估计方法.pdf
本发明涉及一种基于轮廓点混合特征匹配的空间目标姿态估计方法,属于数字图像处理技术领域。本发明在三维模型先验的基础上,充分利用投影图像轮廓中所包含的数据信息,利用混合特征匹配建立从输入图像到目标三维模型的2D‑3D特征对应关系,并通过迭代的方式同步完成特征对应关系的确定和目标三维姿态参数的估计。通过构造轮廓点的混合特征向量并调整位置分量与曲率分量的权重系数,更准确地反映特征空间的结构,从而提高了算法的适用范围,即便初始姿态与真实姿态相差较大,算法依然具有较高的精确性;对投影图像轮廓点进行筛选,减小计算复杂度

一种自旋空间目标姿态估计方法、系统、装置及存储介质.pdf
本发明公开了一种自旋空间目标姿态估计方法、系统、装置及存储介质,方法包括:通过多个ISAR雷达系统获取预设时间段内的多个第一回波信号后进行距离‑多普勒处理,得到第一雷达图像序列;提取出目标投影长度特征结构的目标距离维度尺寸和目标多普勒维度尺寸;确定各ISAR雷达系统的中心雷达视线方向向量;根据目标距离维度尺寸、目标多普勒维度尺寸和中心雷达视线方向向量构建第一优化模型和第二优化模型,并利用粒子群算法求解得到目标瞬时姿态参数和目标自旋参数,从而完成对自旋空间目标的姿态估计。本发明可实现对自旋空间目标在轨瞬时状

一种基于空间映射学习的非合作目标姿态估计方法.pdf
本发明公开了一种基于空间映射学习的非合作目标姿态估计方法,步骤如下:通过Blender和Blensor建模非合作目标的仿真场景,模拟相机和激光雷达的联合成像,大量收集点云和图像融合数据;构建数据集,训练一个人工神经网络,仅从RGB图像预测物体的类别标签、实例掩膜、彩色标签;使用迭代最近点法对齐预测三维模型与点云,计算出物体的姿态。本发明通过Blender建模获得大量点云和图像信息,构建数据集训练人工神经网络,利用神经网络预测图像与坐标空间之间的映射,通过点云对齐技术实现对空间非合作目标的姿态估计。

基于ISAR图像重聚焦的空间目标姿态估计方法.pdf
本发明公开了一种基于ISAR图像重聚焦的空间目标姿态估计方法,属于雷达技术领域,适用于空间目标姿态估计,其主要思路为:确定ISAR雷达,所述ISAR雷达发射信号并接收目标回波信号,并对接收的目标回波信号进行成像处理,得到目标距离多普勒图像;计算最佳距离补偿系数和最佳方位补偿系数;根据最佳距离补偿系数和最佳方位补偿系数,进而计算得到目标平面指向和补偿后的目标距离多普勒图像,所述补偿后的目标距离多普勒图像包括每一个像素点处二次相位补偿距离‑多普勒最终图像;所述补偿后的目标距离多普勒图像和目标平面指向为基于IS