
一种基于轮廓点ORB特征匹配的无纹理空间目标姿态估计算法.pdf

宏硕****mo

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于轮廓点ORB特征匹配的无纹理空间目标姿态估计算法.pdf
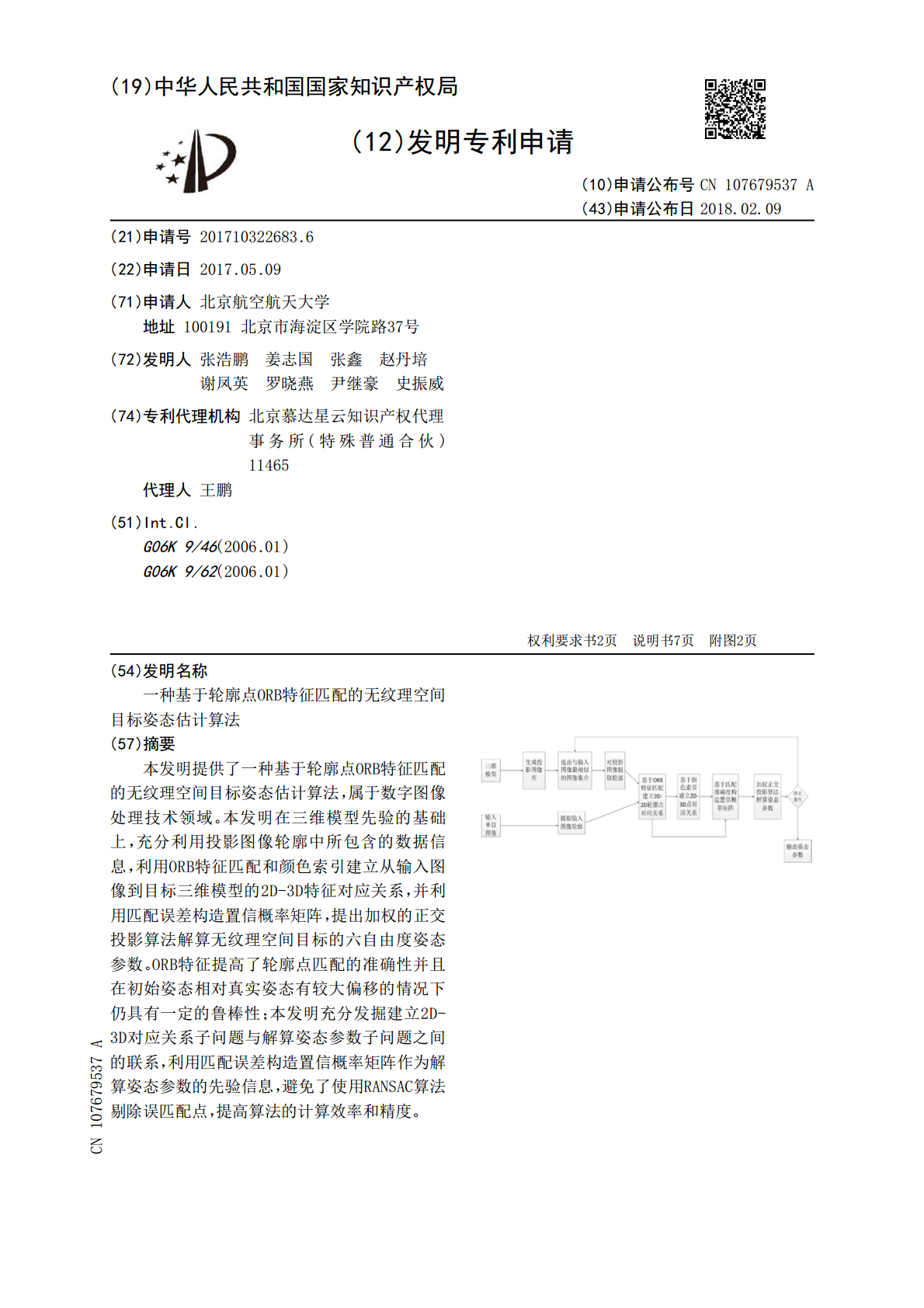
本发明提供了一种基于轮廓点ORB特征匹配的无纹理空间目标姿态估计算法,属于数字图像处理技术领域。本发明在三维模型先验的基础上,充分利用投影图像轮廓中所包含的数据信息,利用ORB特征匹配和颜色索引建立从输入图像到目标三维模型的2D‑3D特征对应关系,并利用匹配误差构造置信概率矩阵,提出加权的正交投影算法解算无纹理空间目标的六自由度姿态参数。ORB特征提高了轮廓点匹配的准确性并且在初始姿态相对真实姿态有较大偏移的情况下仍具有一定的鲁棒性;本发明充分发掘建立2D‑3D对应关系子问题与解算姿态参数子问题之间的联系

基于轮廓点混合特征匹配的空间目标姿态估计方法.pdf
本发明涉及一种基于轮廓点混合特征匹配的空间目标姿态估计方法,属于数字图像处理技术领域。本发明在三维模型先验的基础上,充分利用投影图像轮廓中所包含的数据信息,利用混合特征匹配建立从输入图像到目标三维模型的2D‑3D特征对应关系,并通过迭代的方式同步完成特征对应关系的确定和目标三维姿态参数的估计。通过构造轮廓点的混合特征向量并调整位置分量与曲率分量的权重系数,更准确地反映特征空间的结构,从而提高了算法的适用范围,即便初始姿态与真实姿态相差较大,算法依然具有较高的精确性;对投影图像轮廓点进行筛选,减小计算复杂度

基于ORB特征点匹配的多目标跟踪算法.docx
基于ORB特征点匹配的多目标跟踪算法基于ORB特征点匹配的多目标跟踪算法摘要:多目标跟踪是计算机视觉领域中的一个重要问题,它在许多应用中起到关键作用。本文提出了一种基于ORB特征点匹配的多目标跟踪算法,通过提取图像中的ORB特征点,并利用特征点之间的对应关系实现多目标的跟踪。该算法具有较高的准确性和实时性,并且适用于各种环境。关键词:多目标跟踪、ORB特征点匹配、准确性、实时性1.引言多目标跟踪是计算机视觉领域中的一个热门研究方向。它在许多应用中发挥着关键作用,比如视频监控、无人驾驶等。在多目标跟踪中,如

基于density-ORB特征的图像特征点匹配算法.docx
基于density-ORB特征的图像特征点匹配算法基于density-ORB特征的图像特征点匹配算法摘要:图像特征点匹配是计算机视觉中的关键任务之一,广泛应用于目标识别、图像配准等领域。然而,在现实环境中,存在着图像噪声、光照变化、视角变化、尺度变化等问题,这些问题对特征点的提取和匹配产生了挑战。本文提出了一种基于density-ORB特征的图像特征点匹配算法,利用density-ORB特征提高了特征点的稳定性和可靠性,并通过密度匹配策略进一步优化了匹配结果,实验证明该算法在不同数据集上都具有很好的匹配性

基于ORB特征匹配的全局运动估计.docx
基于ORB特征匹配的全局运动估计基于ORB特征匹配的全局运动估计摘要:在计算机视觉领域,全局运动估计是一个重要的任务,它能够帮助我们理解视频序列中物体的运动以及场景的结构。本论文提出了一种基于ORB特征匹配的全局运动估计方法,该方法利用ORB特征提取器和描述子来实现特征点的提取和匹配,并通过RANSAC算法来剔除错误匹配。实验结果表明,该方法在准确性和鲁棒性上都取得了很好的表现。1.引言全局运动估计是计算机视觉和机器人领域中一个重要的任务。它通常用于检测和跟踪视频序列中物体的运动以及场景的结构。全局运动估