
一种凸轮‑钩爪式空间对接机构.pdf

哲妍****彩妍


1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种凸轮‑钩爪式空间对接机构.pdf
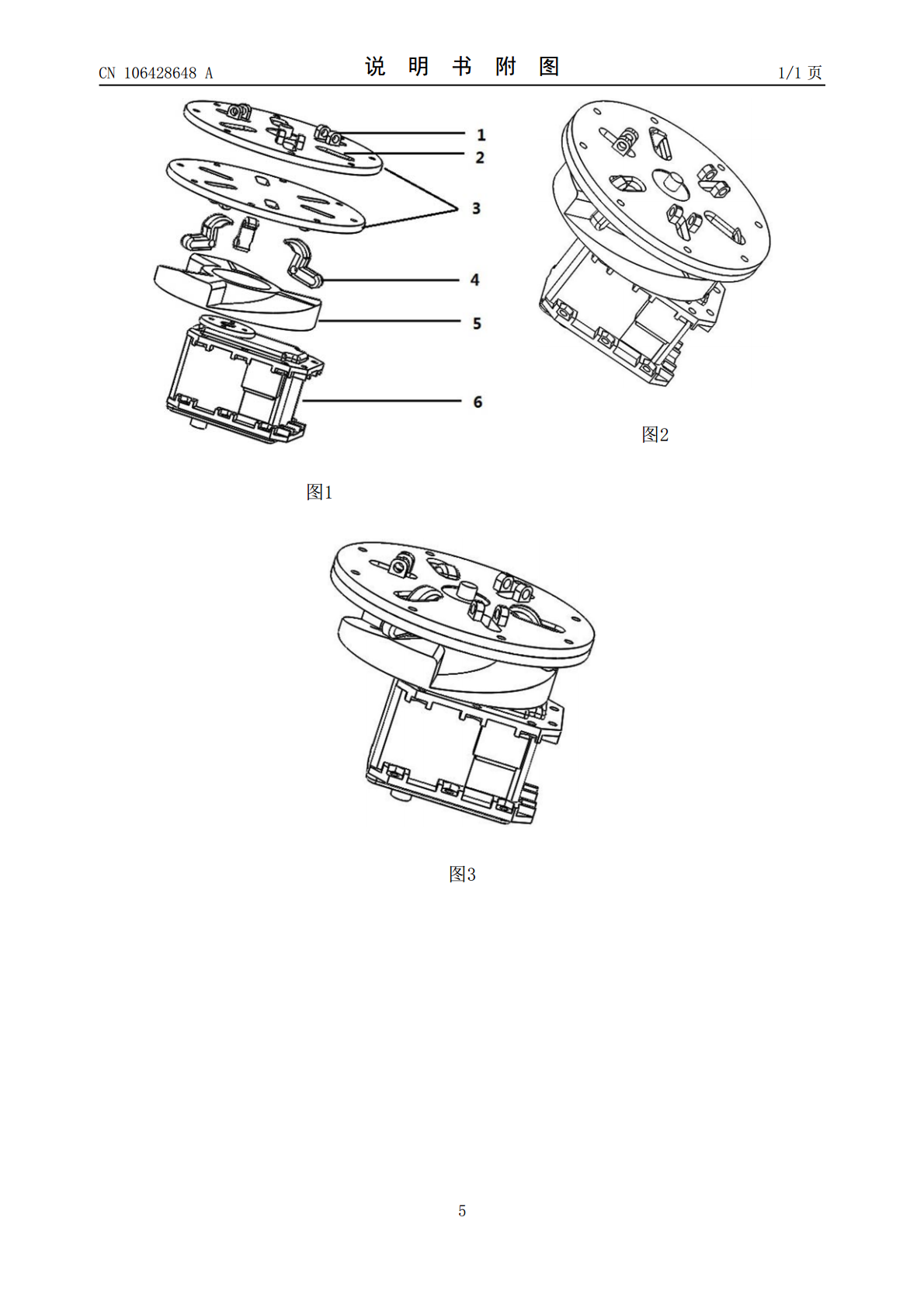
本发明提供了一种凸轮‑钩爪式空间对接机构,两个对接盘分别固连跟踪航天器和目标航天器,分别称为主动对接盘和目标对接盘;至少一个钩爪铰接在主动对接盘上,有且只有一个转动自由度;空间凸轮垂直于轴线的端面为曲面;驱动电机带动空间凸轮绕轴线旋转,空间凸轮的曲面推动钩爪绕铰接轴转动,直至钩住目标对接盘,或由钩住目标对接盘的状态转动至松开目标对接盘。本发明的结构紧凑,质量轻,可靠性高,可多次重复使用。

钩爪-挡板-插销对接机构.pdf
一种钩爪‑挡板‑插销对接机构,包括带导轨的钩爪连接件、带孔的挡板以及与钩爪啮合的十字插销,钩爪连接件作为某一个外部机械装置的公头,挡板作为另一个外部机械装置的母头,导轨引导这两个机械装置自动对接,当公头和母头完全配合,十字插销在外部驱动装置作用下能够使公头和母头完全固定并且实现自锁。本发明是一种新型的高强度、高容错的对接机构,为自重构机器人模块之间的完全自动对接和分离提供技术基础,具有广泛的应用前景。
一种三爪式空间对接机构.pdf
本发明公开了一种三爪式空间对接机构,本发明为了解决控制航天器运行轨道和定向操纵,修正航线等问题,本发明由对接机构、齿轮传动装置、双旋向螺杆、上螺纹盘、下螺纹盘、电机、锁爪和锁爪底盘组成,电机通过电机支座与电机支架支板固定连接,齿轮传动装置安装在底板上,双旋向螺杆一端与从动齿轮连接另一端与顶盖连接,上、下螺纹盘与双旋向螺杆螺纹连接,锁爪由锁爪底盘支撑,本发明的优点是对接范围较大,对接可靠性高,检测控制方便,有效地延长航天器在轨寿命,提高工作性能,降低任务综合成本,意义重大。

一种空间全滚动凸轮弹簧式冲击机构.pdf
一种空间全滚动凸轮弹簧式冲击机构,包括:冲击驱动组件、冲击传动组件;冲击驱动组件包括主动齿轮(8);冲击传动组件包括上盖(1)、弹簧(5)、重锤(6)、从动齿轮(16)等;主动齿轮(8)与从动齿轮(16)啮合,滚子(20)安装在从动齿轮(16)上端面的安装座上,重锤(6)外壁上圆环形结构的下端面有与滚子(20)配合的端面凸轮并通过钢垫(22)与上壳体(2)进行定位,重锤(6)下端插入从动齿轮(16)的中心孔内,弹簧(5)一端固定在重锤(6)的圆环形结构上端面上,另一端固定在上盖(1)上。本发明用于解决空间
一种内外夹紧式紧凑空间对接机构.pdf
一种内外夹紧式紧凑空间对接机构,外环传动电机工作,带动外环传动齿轮转动,外环传动齿轮转动带动外环转盘转动转动,外环转盘转动能够使手爪张开或闭合,闭合时能够夹持住待夹持目标物外壁;内环传动电机工作,内环传动丝杠的另一端通过丝母与氮气弹簧的一端连接,氮气弹簧的另一端连接内环,内环传动丝杠旋转能够带动内环升降;氮气弹簧初始状态处于最大伸出状态,氮气弹簧能够压缩提供柔性加持力支撑待夹持目标物;当外环闭合箍紧待夹持目标物的外壁后,内环传动丝杠旋转带动内环上升,当内环接触到待夹持目标物内壁时,氮气弹簧压缩,提供柔性加