
钩爪-挡板-插销对接机构.pdf

努力****绮亦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

钩爪-挡板-插销对接机构.pdf
一种钩爪‑挡板‑插销对接机构,包括带导轨的钩爪连接件、带孔的挡板以及与钩爪啮合的十字插销,钩爪连接件作为某一个外部机械装置的公头,挡板作为另一个外部机械装置的母头,导轨引导这两个机械装置自动对接,当公头和母头完全配合,十字插销在外部驱动装置作用下能够使公头和母头完全固定并且实现自锁。本发明是一种新型的高强度、高容错的对接机构,为自重构机器人模块之间的完全自动对接和分离提供技术基础,具有广泛的应用前景。
一种凸轮‑钩爪式空间对接机构.pdf
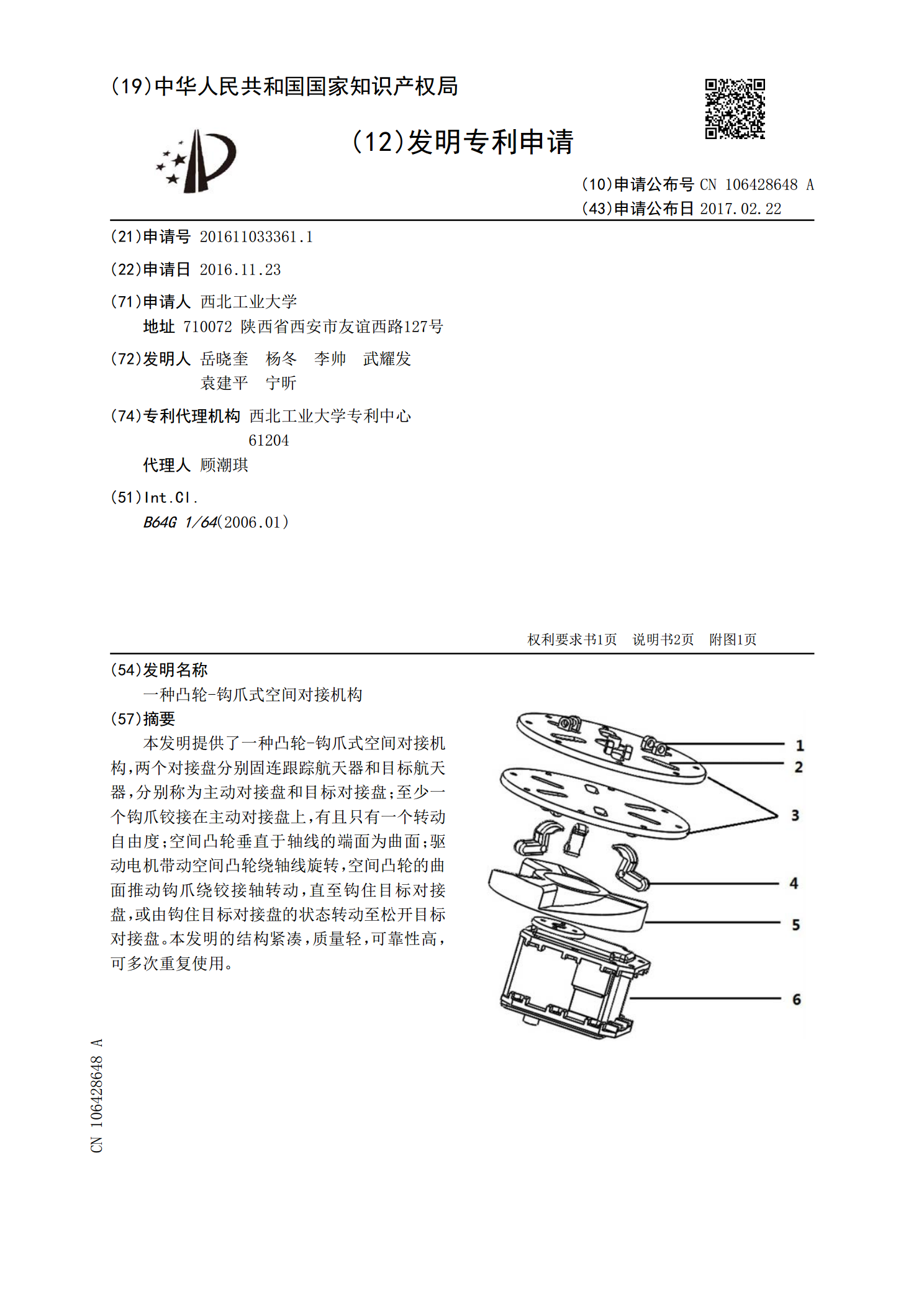
本发明提供了一种凸轮‑钩爪式空间对接机构,两个对接盘分别固连跟踪航天器和目标航天器,分别称为主动对接盘和目标对接盘;至少一个钩爪铰接在主动对接盘上,有且只有一个转动自由度;空间凸轮垂直于轴线的端面为曲面;驱动电机带动空间凸轮绕轴线旋转,空间凸轮的曲面推动钩爪绕铰接轴转动,直至钩住目标对接盘,或由钩住目标对接盘的状态转动至松开目标对接盘。本发明的结构紧凑,质量轻,可靠性高,可多次重复使用。

插销机构及应用其的天地插销装置.pdf
本发明公开了插销机构,包括面板、拨杆和插销杆,还包括驱动架、后盖和齿轮,拨杆通过铆钉设置于面板,拨杆的一端穿过面板与驱动架连接,驱动架可滑动设置于面板,后盖可滑动设置于驱动架,驱动架上设有第一齿条,后盖上设有第二齿条,齿轮的一端固定于面板,另一端分别与第一齿条和第二齿条啮合,后盖与插销杆连接。还公开了应用其的天地插销装置,包括上述插销机构,还包括插销头和插销座,插销头的一端与插销机构通过插销杆连接,另一端插接于插销座。本发明的插销机构采用齿轮齿条结构进行驱动,传动平稳,不易发生故障,使用寿命高。天地插销装

一种自动插销机构.pdf
一种自动插销机构,导轨支架(1)上安装燕尾槽导轨,路径引导块(2)的一面是平直的燕尾槽,与导轨支架(1)的燕尾槽导轨相配合,沿导轨支架(1)自由移动;路径引导块(2)的另一面为曲面,插销(4)通过导轨与固定的平台(3)相连;插销(4)前端安装有滚轮,用于保证与路径引导块的曲面接触时运动平稳,减少摩擦力,插销(4)尾部安装有弹簧(5);转块(10)通过销轴安装在插销(4)表面,转块(10)内侧安装防止转块过度旋转的转块档轴(6);转块拨动轴(9)固定在平台(3)上,滑动挡块(8)通过导轨与平台(3)相连,滑
自锁型插销定位机构.pdf
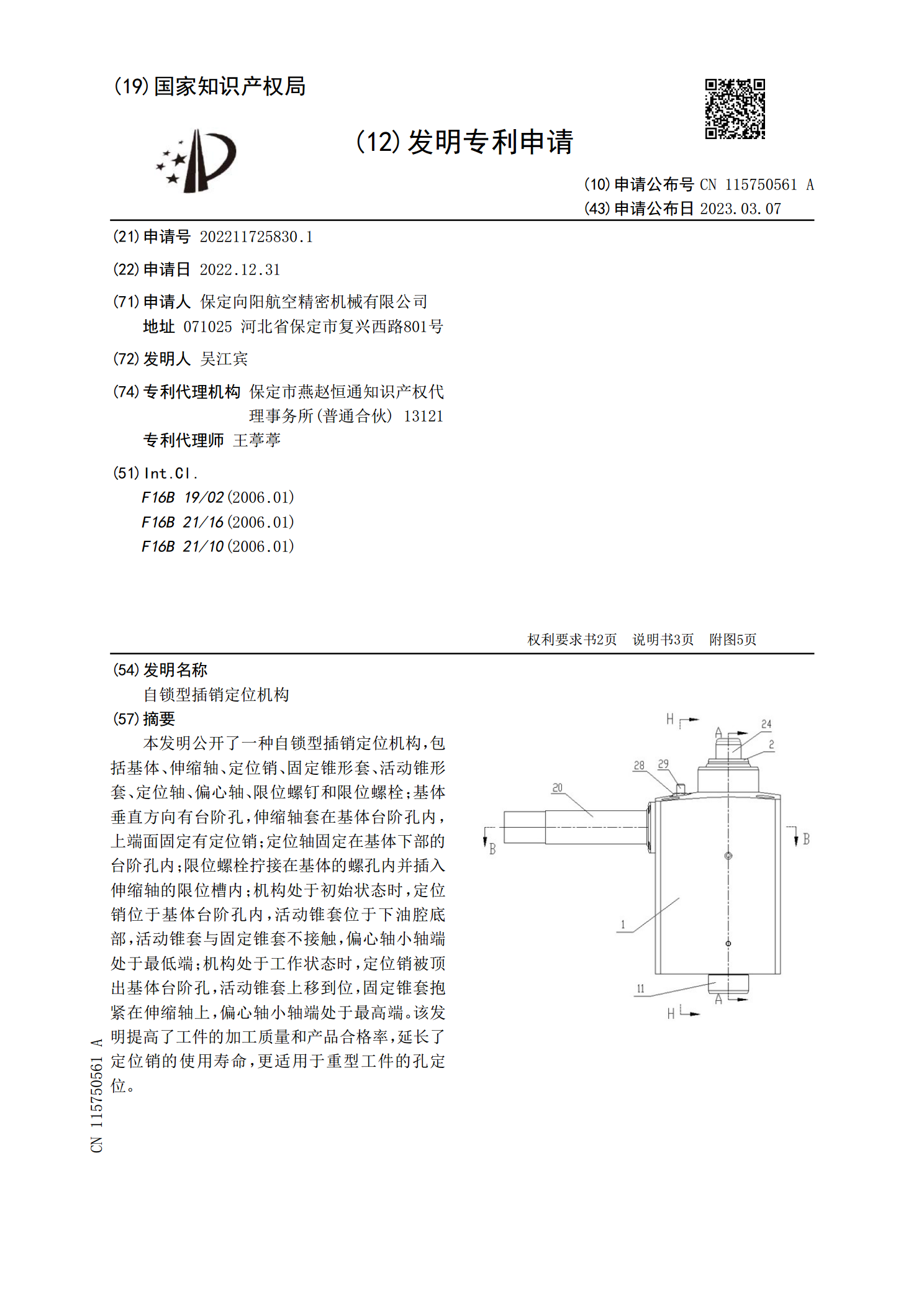
本发明公开了一种自锁型插销定位机构,包括基体、伸缩轴、定位销、固定锥形套、活动锥形套、定位轴、偏心轴、限位螺钉和限位螺栓;基体垂直方向有台阶孔,伸缩轴套在基体台阶孔内,上端面固定有定位销;定位轴固定在基体下部的台阶孔内;限位螺栓拧接在基体的螺孔内并插入伸缩轴的限位槽内;机构处于初始状态时,定位销位于基体台阶孔内,活动锥套位于下油腔底部,活动锥套与固定锥套不接触,偏心轴小轴端处于最低端;机构处于工作状态时,定位销被顶出基体台阶孔,活动锥套上移到位,固定锥套抱紧在伸缩轴上,偏心轴小轴端处于最高端。该发明提高了