
方法、驱动系统和车辆.pdf

文阁****23

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

驱动系统和车辆驱动方法.pdf
本发明涉及驱动系统和驱动车辆(1)的方法。驱动系统包括燃式发动机(2)、可以制动车辆(1)的制动装置(24)、电机(9)、连接到电机的电能存储器(20)、被电力操作的至少一个组件(22)、包括太阳轮(10)、齿圈(11)和行星轮架(12)的行星齿轮装置。驱动系统包括控制单元(18),所述控制单元配置成在当车辆(1)在运动时、驱动扭矩(T

驱动系统和车辆驱动方法.pdf
本发明涉及驱动系统和驱动车辆(1)的方法。驱动系统包括燃式发动机(2)、能够制动车辆(1)的制动装置(24)、电机(9)、连接到电机的电能存储器(20)、被电力操作的至少一个组件(22)、包括太阳轮(10)、齿圈(11)和行星轮架(12)的行星齿轮装置。驱动系统包括控制单元(18),所述控制单元配置成在车辆(1)静止、没有驱动扭矩(T

驱动系统和车辆驱动方法.pdf
本发明涉及驱动系统和驱动车辆(1)的方法。驱动系统包括燃式发动机(2),其输出轴(2a)连接到行星齿轮装置的第一部件(10),变速箱(3),其输入轴(3a)连接到行星齿轮装置的第二部件(12),和电机,其连接到行星齿轮装置的第三部件(11)。驱动系统包括具有电阻器(22)的电路(21)和电开关(23),至少是在车辆(1)的起动过程中,可通过该开关将电机(9)连接到电路(21)和电阻器(22)。
方法、驱动系统和车辆.pdf
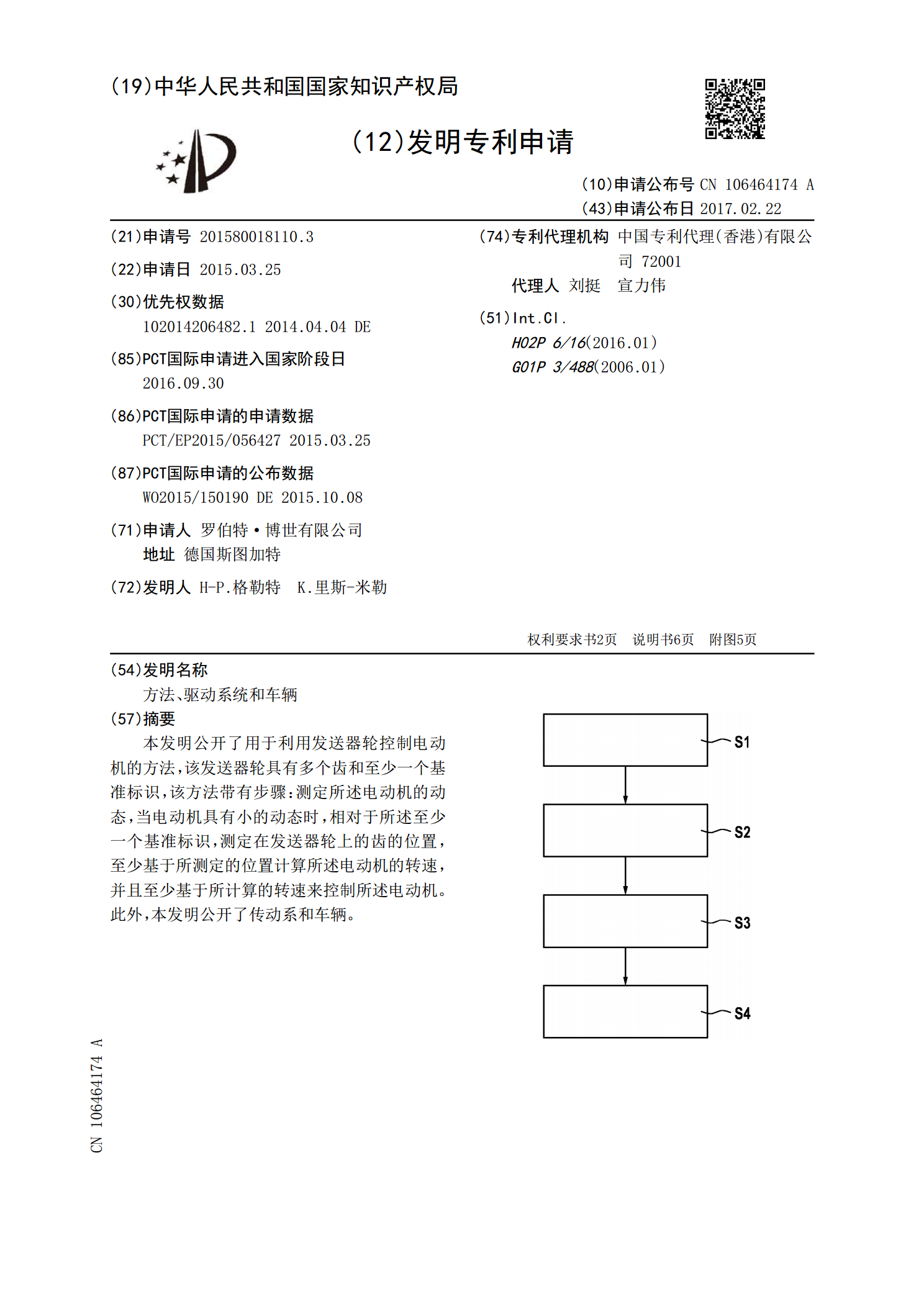
本发明公开了用于利用发送器轮控制电动机的方法,该发送器轮具有多个齿和至少一个基准标识,该方法带有步骤:测定所述电动机的动态,当电动机具有小的动态时,相对于所述至少一个基准标识,测定在发送器轮上的齿的位置,至少基于所测定的位置计算所述电动机的转速,并且至少基于所计算的转速来控制所述电动机。此外,本发明公开了传动系和车辆。
工程车辆驱动系统、驱动方法和工程车辆.pdf
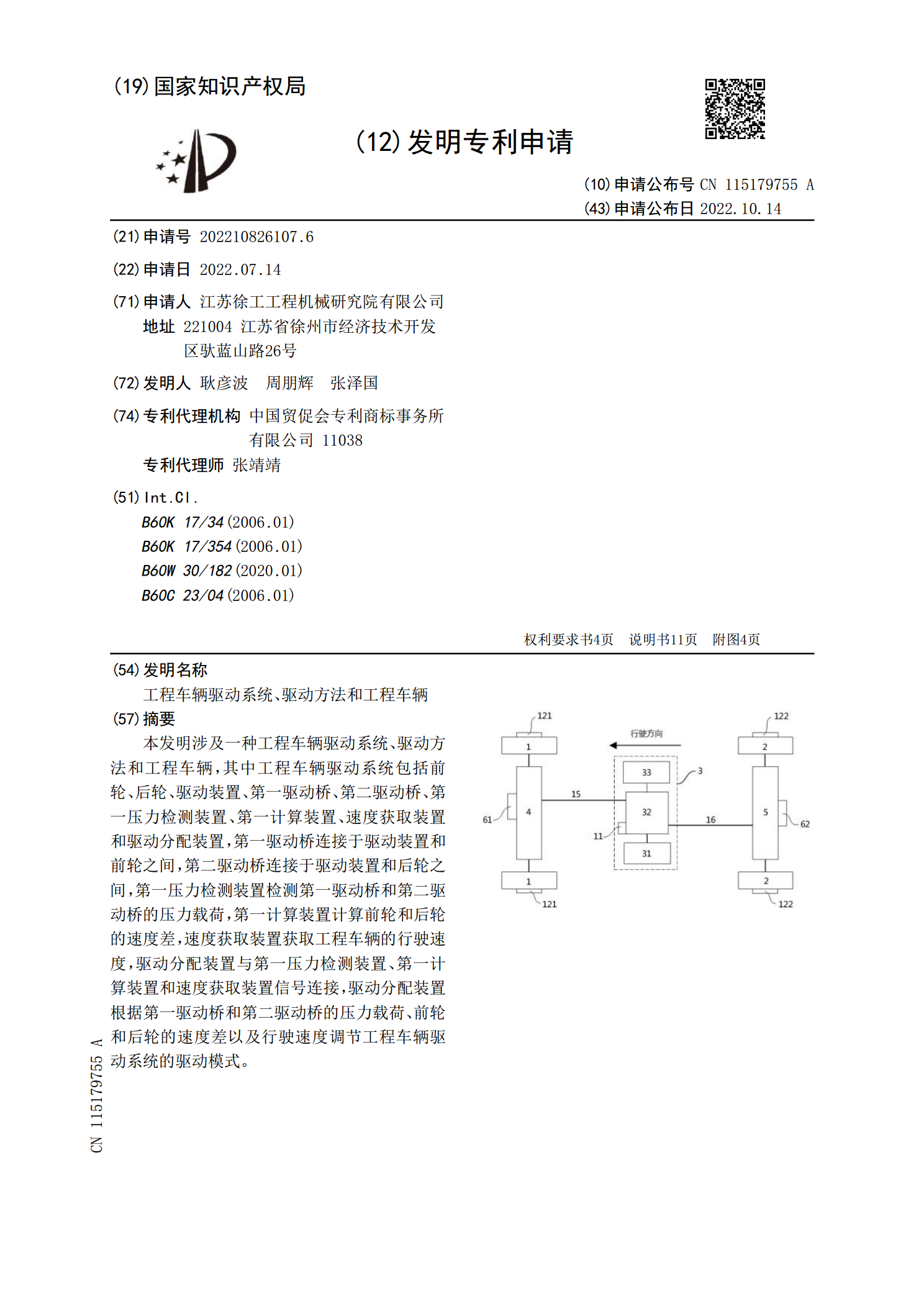
本发明涉及一种工程车辆驱动系统、驱动方法和工程车辆,其中工程车辆驱动系统包括前轮、后轮、驱动装置、第一驱动桥、第二驱动桥、第一压力检测装置、第一计算装置、速度获取装置和驱动分配装置,第一驱动桥连接于驱动装置和前轮之间,第二驱动桥连接于驱动装置和后轮之间,第一压力检测装置检测第一驱动桥和第二驱动桥的压力载荷,第一计算装置计算前轮和后轮的速度差,速度获取装置获取工程车辆的行驶速度,驱动分配装置与第一压力检测装置、第一计算装置和速度获取装置信号连接,驱动分配装置根据第一驱动桥和第二驱动桥的压力载荷、前轮和后轮的