
基于广义回归神经网络的超声波电机非线性死区补偿控制系统及方法.pdf

志玉****爱啊

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于广义回归神经网络的超声波电机非线性死区补偿控制系统及方法.pdf
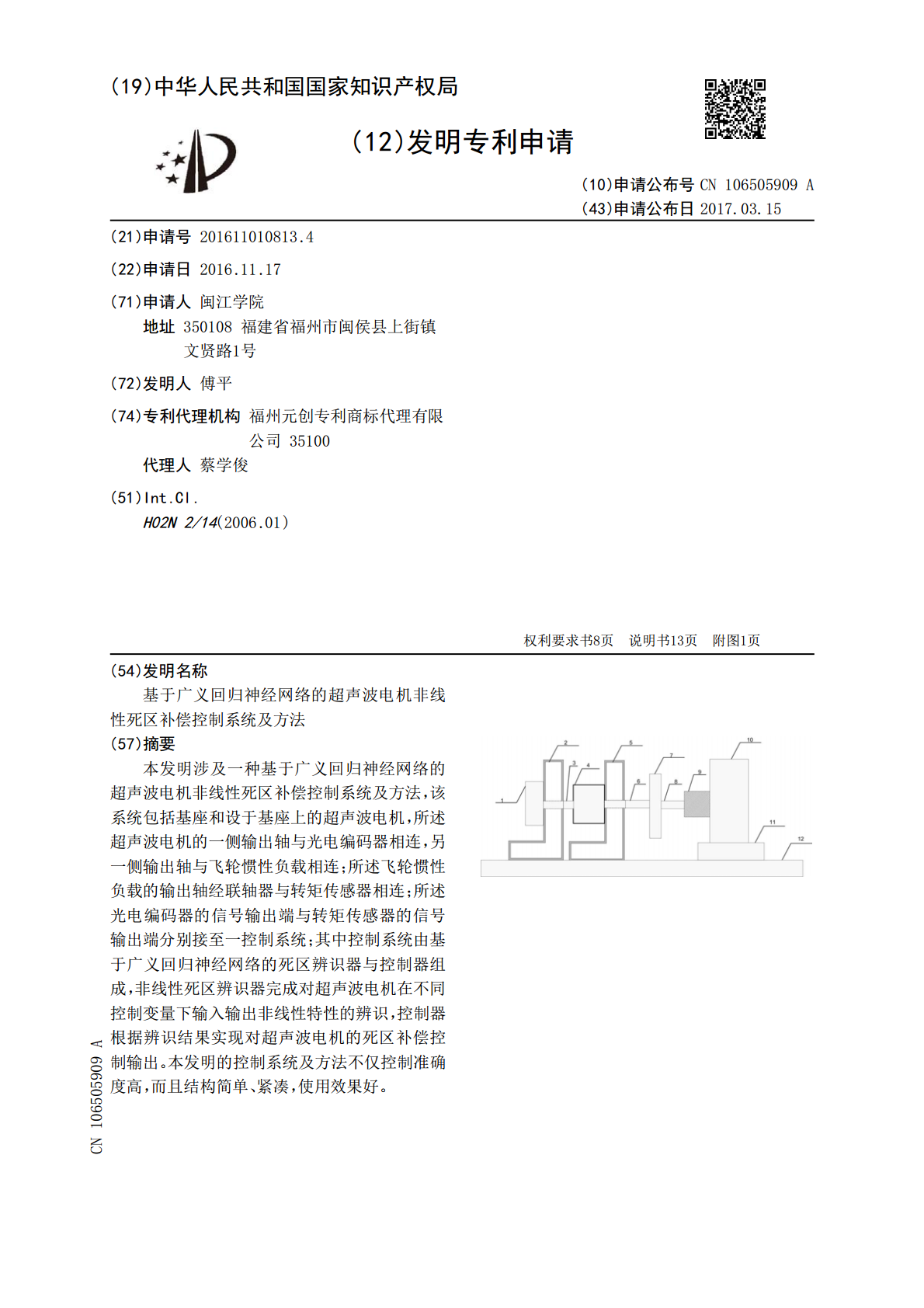
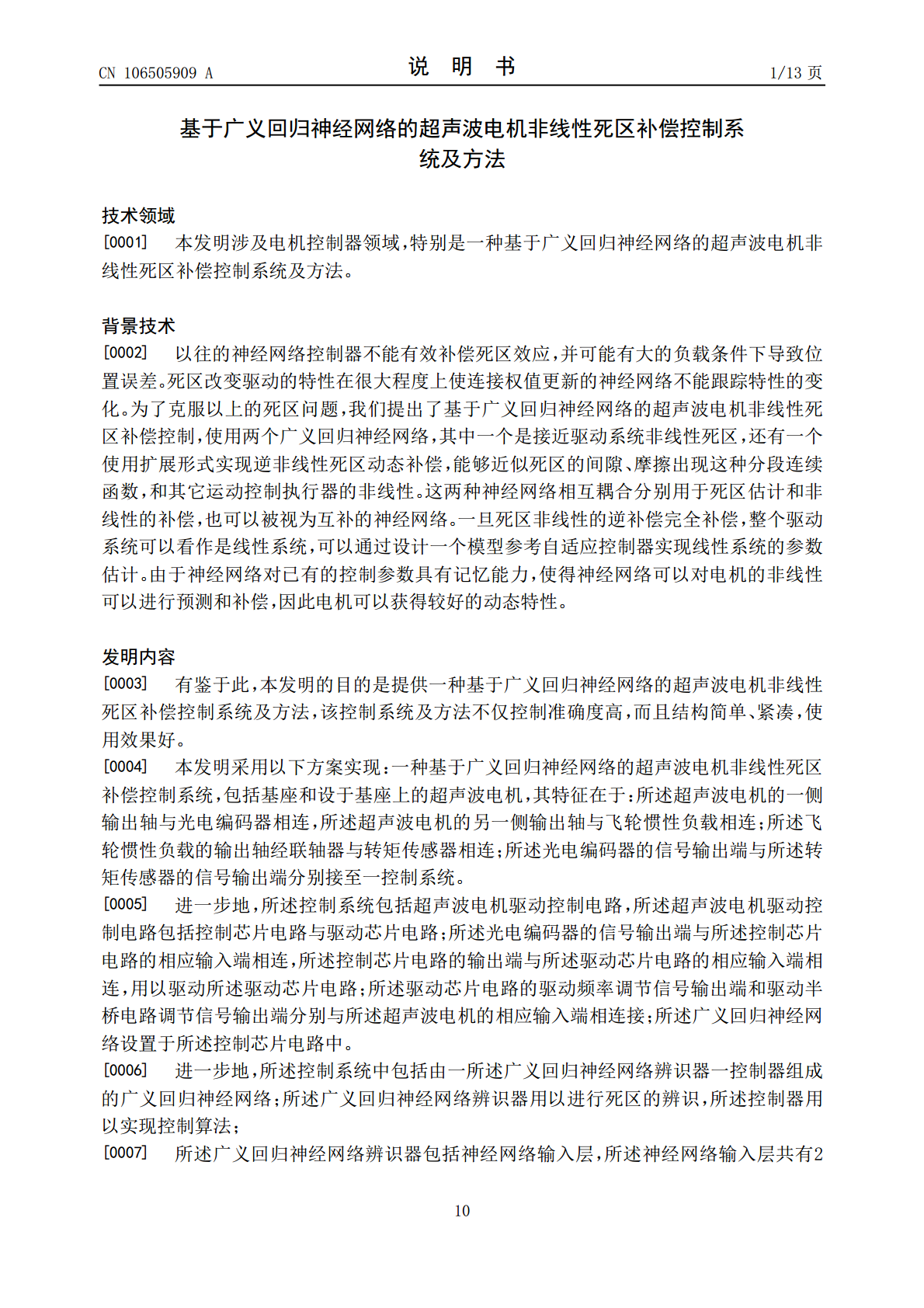
本发明涉及一种基于广义回归神经网络的超声波电机非线性死区补偿控制系统及方法,该系统包括基座和设于基座上的超声波电机,所述超声波电机的一侧输出轴与光电编码器相连,另一侧输出轴与飞轮惯性负载相连;所述飞轮惯性负载的输出轴经联轴器与转矩传感器相连;所述光电编码器的信号输出端与转矩传感器的信号输出端分别接至一控制系统;其中控制系统由基于广义回归神经网络的死区辨识器与控制器组成,非线性死区辨识器完成对超声波电机在不同控制变量下输入输出非线性特性的辨识,控制器根据辨识结果实现对超声波电机的死区补偿控制输出。本发明的控

基于广义回归神经网络辨识器的超声波电机位置与速度控制系统.pdf
本发明涉及一种基于广义回归神经网络辨识器的超声波电机位置与速度控制系统,包括基座和设于基座上的超声波电机,所述超声波电机的一侧输出轴与光电编码器相连,另一侧输出轴与飞轮惯性负载相连;所述飞轮惯性负载的输出轴经联轴器与转矩传感器相连;所述光电编码器的信号输出端与转矩传感器的信号输出端分别接至一控制系统;其中控制系统由基于广义回归神经网络的辨识器和电机组成,辨识器完成对超声波电机在不同控制变量、飞轮惯性负载下输入输出特性的辨识,控制器根据辨识结果实现对超声波电机的速度/位置控制输出,以确定不同负载、不同控制变
超声波电机伺服控制系统速度死区补偿控制装置及方法.pdf
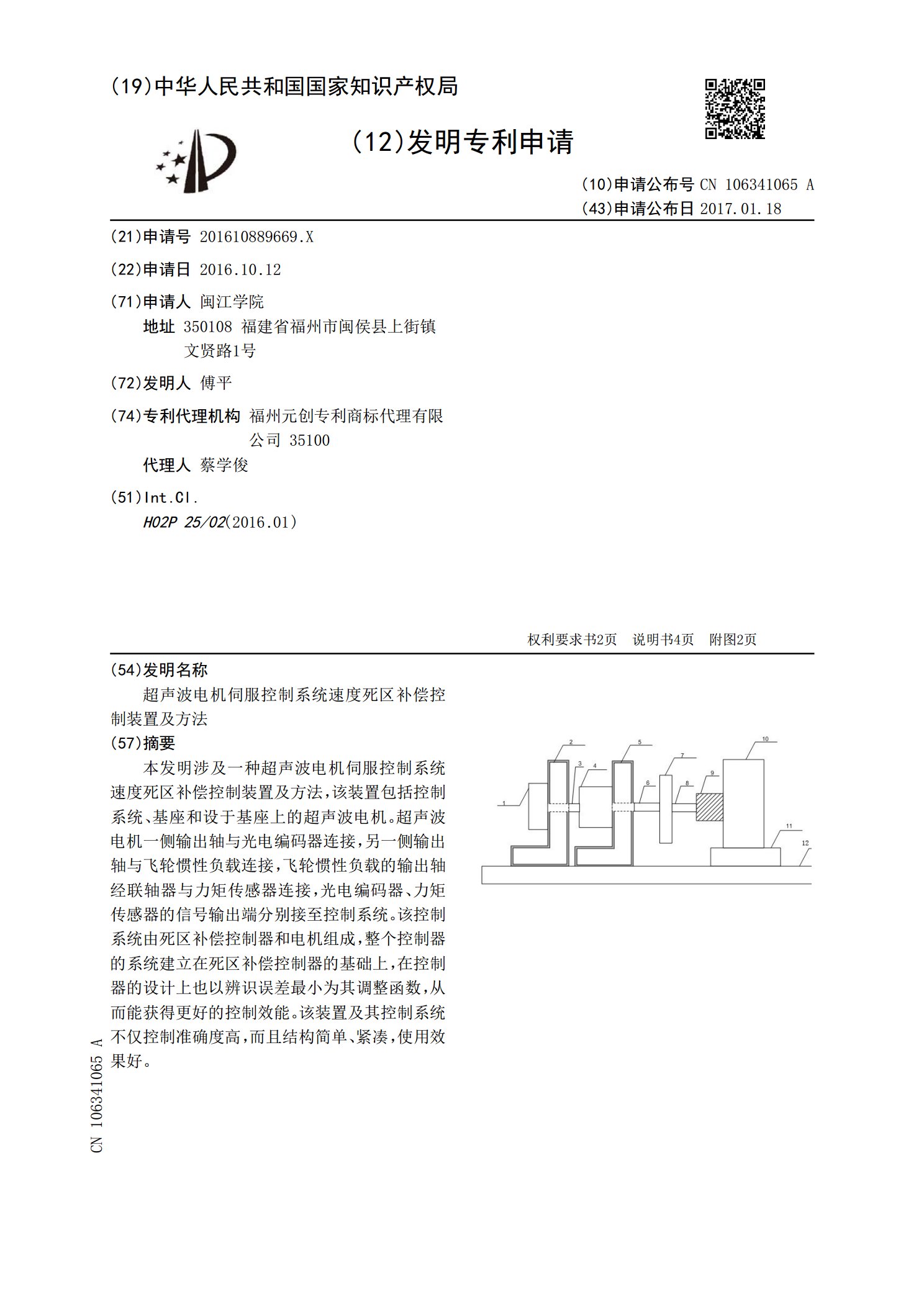
本发明涉及一种超声波电机伺服控制系统速度死区补偿控制装置及方法,该装置包括控制系统、基座和设于基座上的超声波电机。超声波电机一侧输出轴与光电编码器连接,另一侧输出轴与飞轮惯性负载连接,飞轮惯性负载的输出轴经联轴器与力矩传感器连接,光电编码器、力矩传感器的信号输出端分别接至控制系统。该控制系统由死区补偿控制器和电机组成,整个控制器的系统建立在死区补偿控制器的基础上,在控制器的设计上也以辨识误差最小为其调整函数,从而能获得更好的控制效能。该装置及其控制系统不仅控制准确度高,而且结构简单、紧凑,使用效果好。

一种离线辨识死区非线性补偿值及死区补偿方法.pdf
本发明公开了一种离线辨识死区非线性补偿值及死区补偿方法,包括以下步骤:(1)离线辨识不同电流幅度情况下的死区补偿值;(2)死区补偿值的线性插值计算;(3)死区补偿。本发明提供的一种离线辨识死区非线性补偿值及死区补偿方法,通过辨识得到一个与电流幅度相关的死区补偿非线性特性曲线表格。根据采样的电机相电流极性和电流幅度,以电流幅度作为输入,查表计算得到电机单相的死区补偿值。本发明可应用于变频器或者伺服驱动器驱动的单相、三相或者多相电机系统中,可有效提升变频器或者伺服驱动器的死区补偿精度,提高电机相电流的正弦度,
死区补偿方法、死区补偿装置、电机驱动器及存储介质.pdf
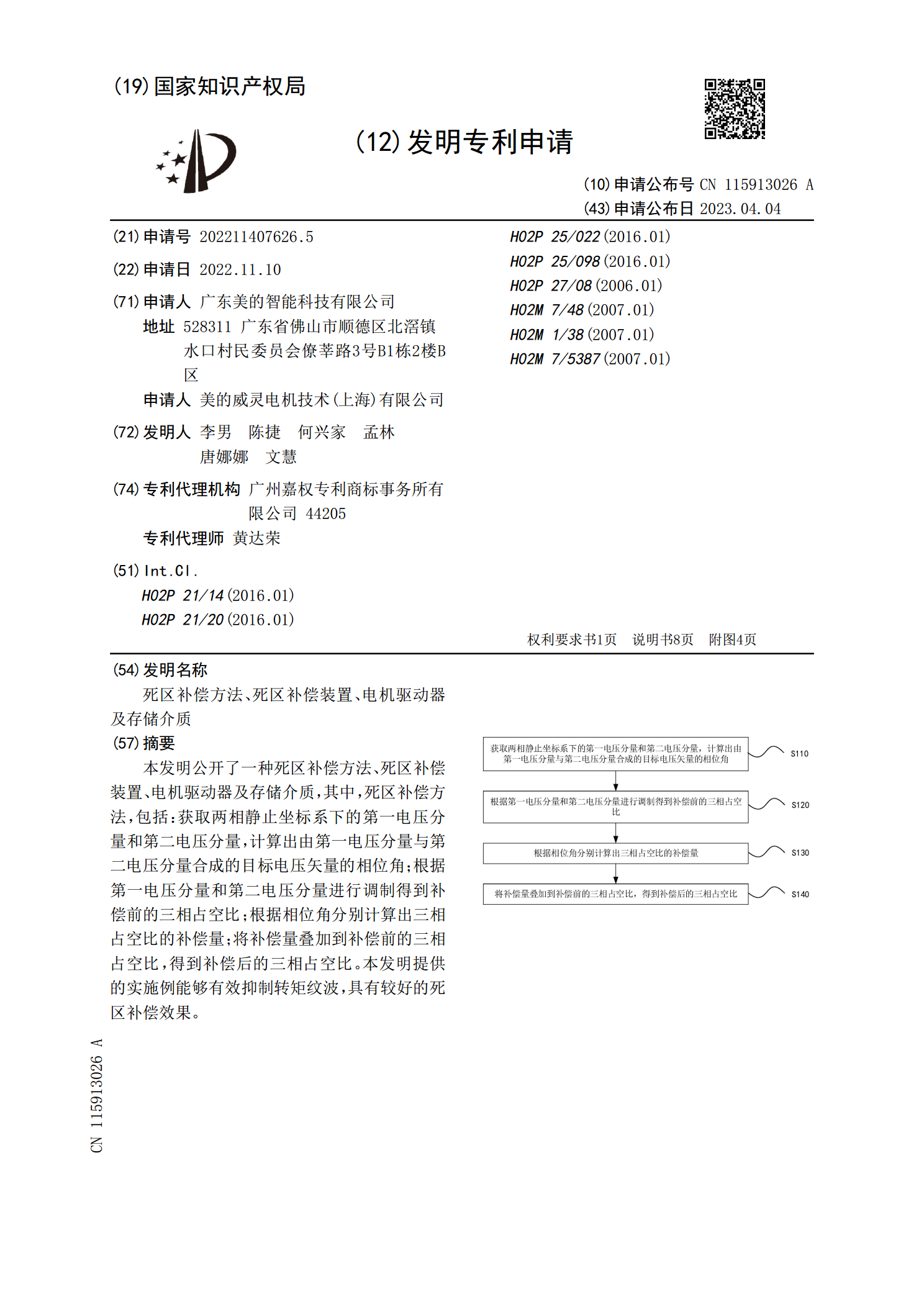
本发明公开了一种死区补偿方法、死区补偿装置、电机驱动器及存储介质,其中,死区补偿方法,包括:获取两相静止坐标系下的第一电压分量和第二电压分量,计算出由第一电压分量与第二电压分量合成的目标电压矢量的相位角;根据第一电压分量和第二电压分量进行调制得到补偿前的三相占空比;根据相位角分别计算出三相占空比的补偿量;将补偿量叠加到补偿前的三相占空比,得到补偿后的三相占空比。本发明提供的实施例能够有效抑制转矩纹波,具有较好的死区补偿效果。