
用于确定轨道车辆的绝对速度的方法与装置.pdf

努力****冰心


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于确定轨道车辆的绝对速度的方法与装置.pdf
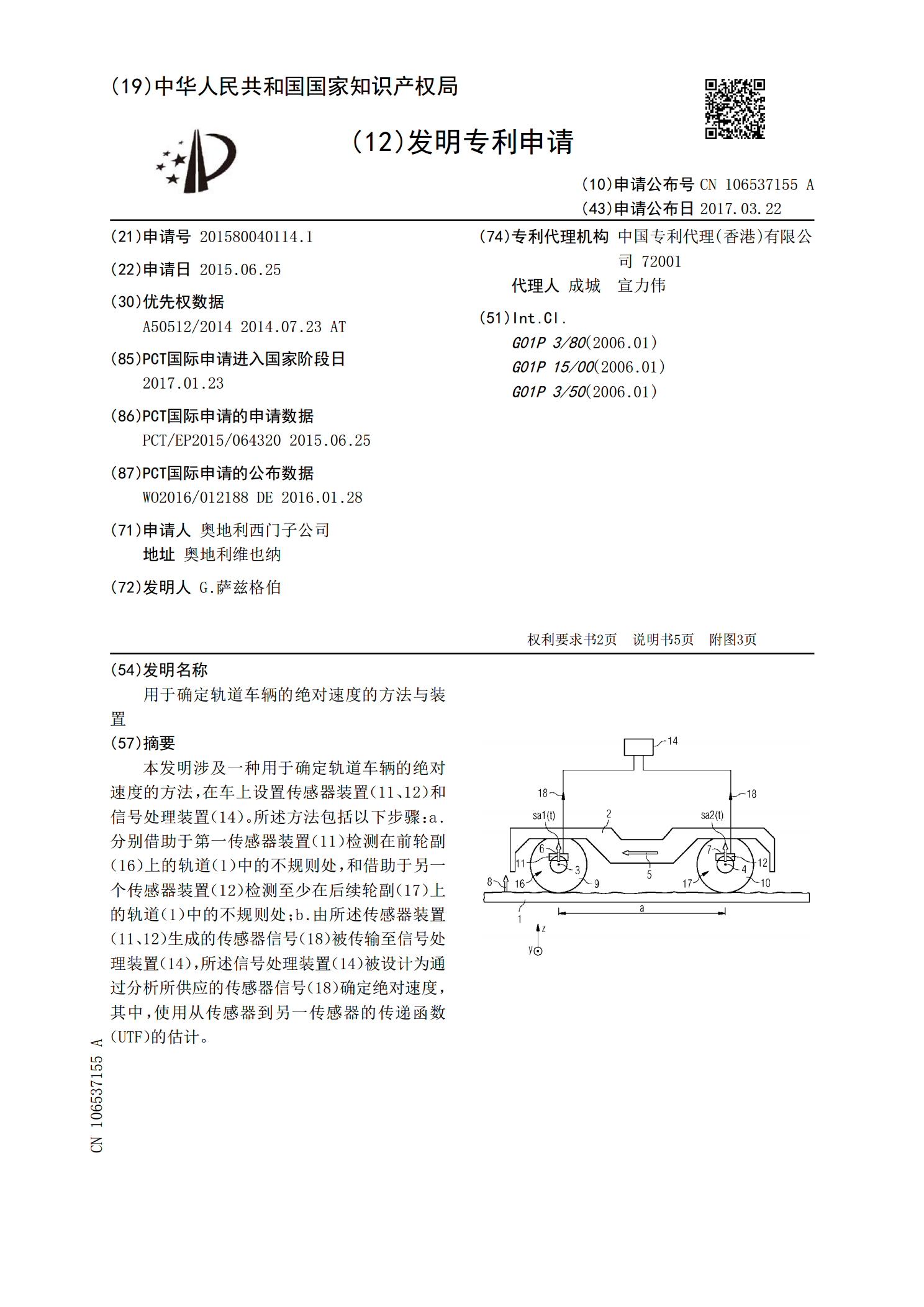
本发明涉及一种用于确定轨道车辆的绝对速度的方法,在车上设置传感器装置(11、12)和信号处理装置(14)。所述方法包括以下步骤:a.分别借助于第一传感器装置(11)检测在前轮副(16)上的轨道(1)中的不规则处,和借助于另一个传感器装置(12)检测至少在后续轮副(17)上的轨道(1)中的不规则处;b.由所述传感器装置(11、12)生成的传感器信号(18)被传输至信号处理装置(14),所述信号处理装置(14)被设计为通过分析所供应的传感器信号(18)确定绝对速度,其中,使用从传感器到另一传感器的传递函数(U

用于轨道车辆的制动调节装置、用于轨道车辆的制动设备、轨道车辆和用于调节轨道车辆的制动设备的方法.pdf
本发明涉及一种用于轨道车辆(10)的制动调节装置(51),出于控制目的,制动调节装置连接或能连接到至少一个第一制动装置(56)和第二制动装置(58),其中第一制动装置(56)适用于使轨道车辆(10)的至少一个第一车轮(52)制动,并且第二制动装置(58)适用于使至少一个第二车轮(54)制动。第一车轮(52)和第二车轮(54)可以实现彼此独立地旋转。制动调节装置(51)设计用于,彼此独立地调节第一制动装置(56)和第二制动装置(58),并且能够确定和/或记录第一车轮(52)的实际打滑和第二车轮(54)的实际
用于轨道车辆的车厢和用于轨道车辆的车辆装置.pdf
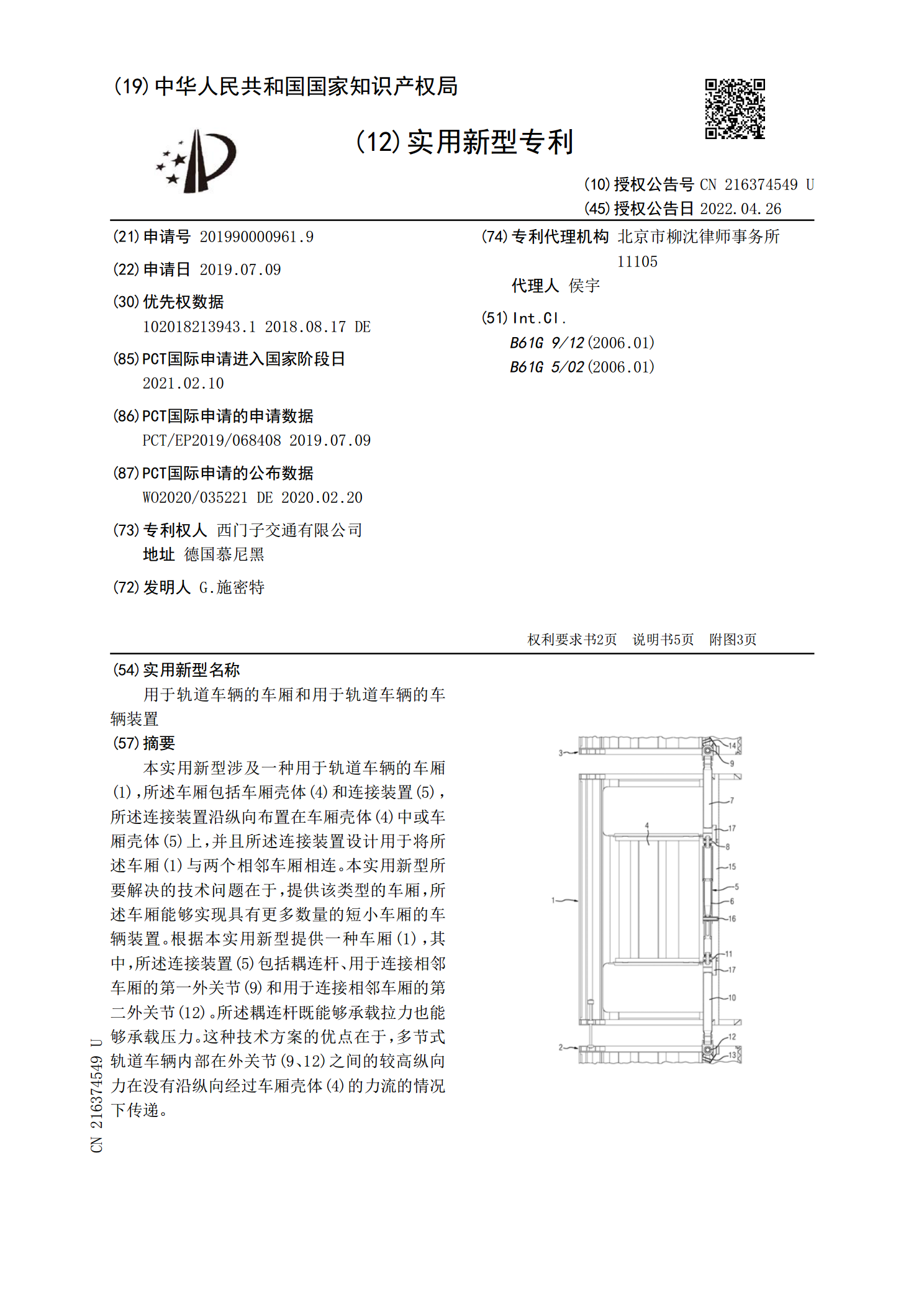
本实用新型涉及一种用于轨道车辆的车厢(1),所述车厢包括车厢壳体(4)和连接装置(5),所述连接装置沿纵向布置在车厢壳体(4)中或车厢壳体(5)上,并且所述连接装置设计用于将所述车厢(1)与两个相邻车厢相连。本实用新型所要解决的技术问题在于,提供该类型的车厢,所述车厢能够实现具有更多数量的短小车厢的车辆装置。根据本实用新型提供一种车厢(1),其中,所述连接装置(5)包括耦连杆、用于连接相邻车厢的第一外关节(9)和用于连接相邻车厢的第二外关节(12)。所述耦连杆既能够承载拉力也能够承载压力。这种技术方案的优

用于确定注视区域的方法、车辆控制方法及装置.pdf
本公开提供了一种用于确定注视区域的方法、车辆控制方法及装置,其中,所述用于确定注视区域的方法包括:获取预定空间内的多个不同视角的图像采集装置同步采集的目标对象的多幅人脸图像;基于至少两幅所述人脸图像,确定所述目标对象的预定人脸关键点的三维位置信息;基于所述多幅人脸图像,确定所述目标对象的融合视线信息;基于所述预定人脸关键点的三维位置信息以及所述融合视线信息,确定所述目标对象在所述预定空间内的注视区域信息。

用于确定车辆、尤其是轨道车辆的车轮直径的方法和设备.pdf
本发明涉及一种用于确定车辆(2)、尤其是轨道车辆的车轮直径(10)的方法和设备,其中在安装距离传感器(16、18)时确定距离传感器(16、18)和车轮(8)的旋转轴线(24)之间的第一距离(30),其中在车辆(2)运行期间确定距离传感器(16、18)和车轮(8)的滚动面(26)之间的第二距离(28),且其中车轮(8)直径(10)根据关系式2×(第一距离(30)-第二距离(28))确定。