
控制平衡车运动的方法及装置、平衡车.pdf

听容****55


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
控制平衡车运动的方法及装置、平衡车.pdf
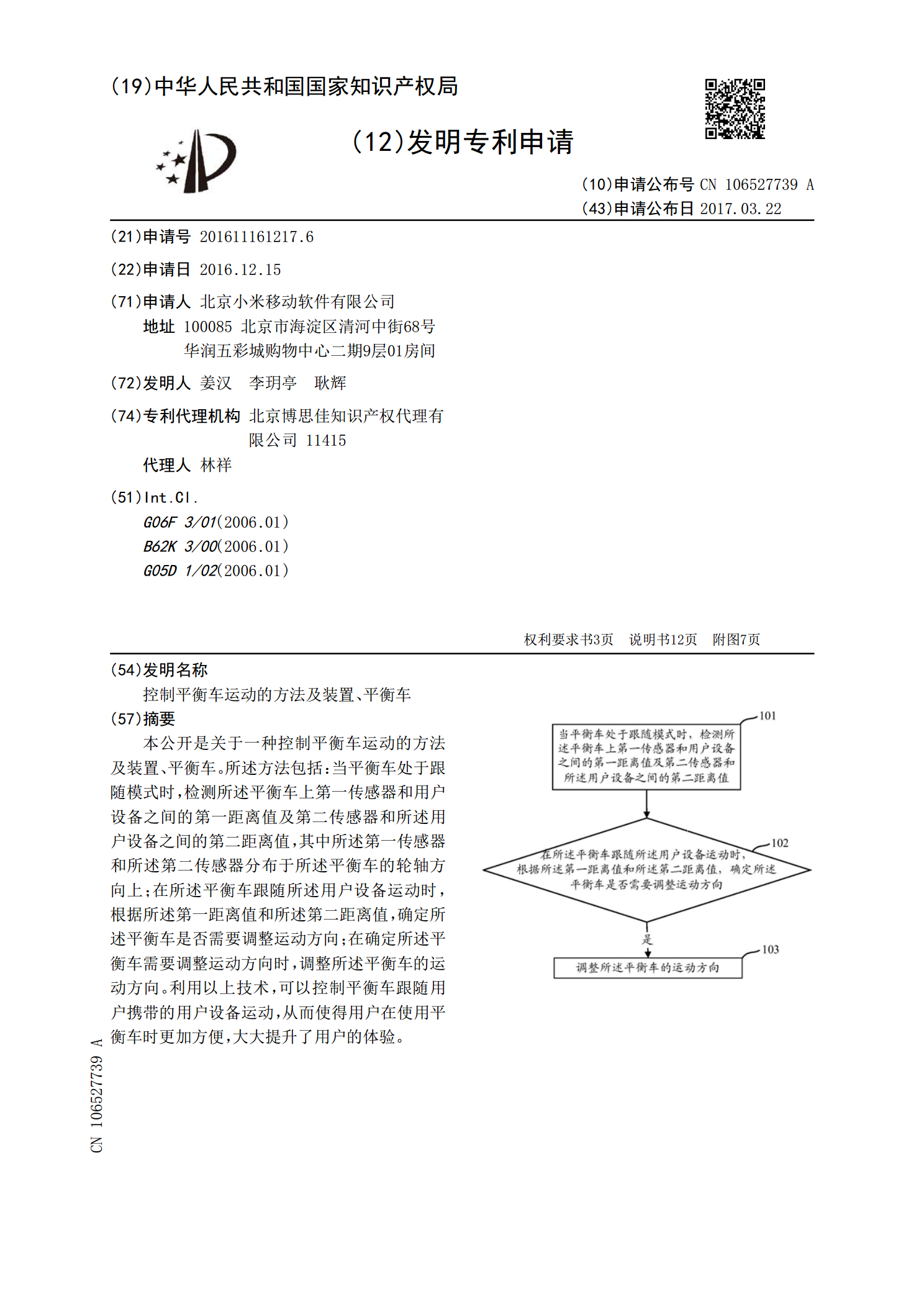
本公开是关于一种控制平衡车运动的方法及装置、平衡车。所述方法包括:当平衡车处于跟随模式时,检测所述平衡车上第一传感器和用户设备之间的第一距离值及第二传感器和所述用户设备之间的第二距离值,其中所述第一传感器和所述第二传感器分布于所述平衡车的轮轴方向上;在所述平衡车跟随所述用户设备运动时,根据所述第一距离值和所述第二距离值,确定所述平衡车是否需要调整运动方向;在确定所述平衡车需要调整运动方向时,调整所述平衡车的运动方向。利用以上技术,可以控制平衡车跟随用户携带的用户设备运动,从而使得用户在使用平衡车时更加方便
平衡车的开机方法及控制平衡车开机的装置.pdf
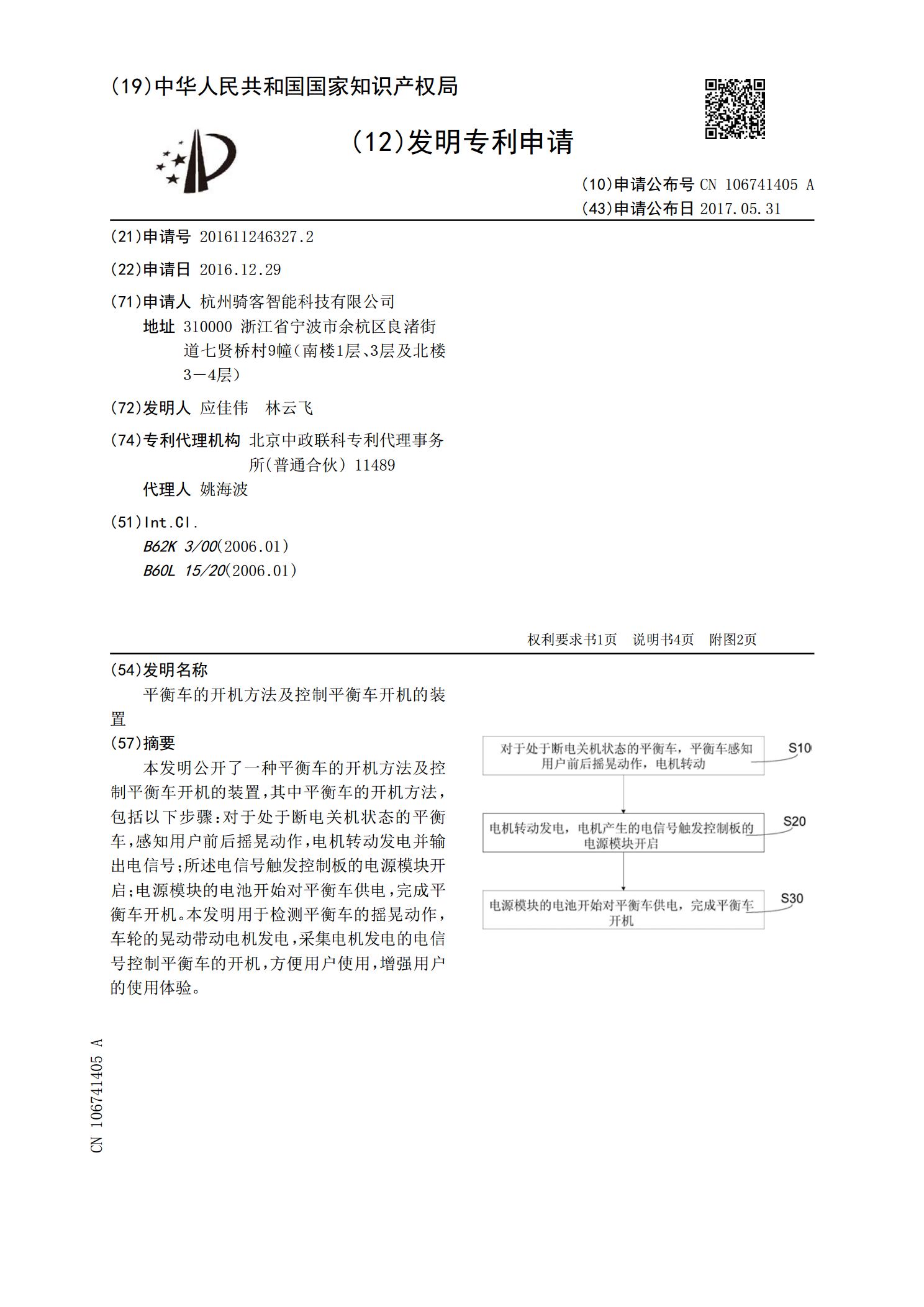
本发明公开了一种平衡车的开机方法及控制平衡车开机的装置,其中平衡车的开机方法,包括以下步骤:对于处于断电关机状态的平衡车,感知用户前后摇晃动作,电机转动发电并输出电信号;所述电信号触发控制板的电源模块开启;电源模块的电池开始对平衡车供电,完成平衡车开机。本发明用于检测平衡车的摇晃动作,车轮的晃动带动电机发电,采集电机发电的电信号控制平衡车的开机,方便用户使用,增强用户的使用体验。
平衡车控制方法、装置、平衡车和存储介质.pdf
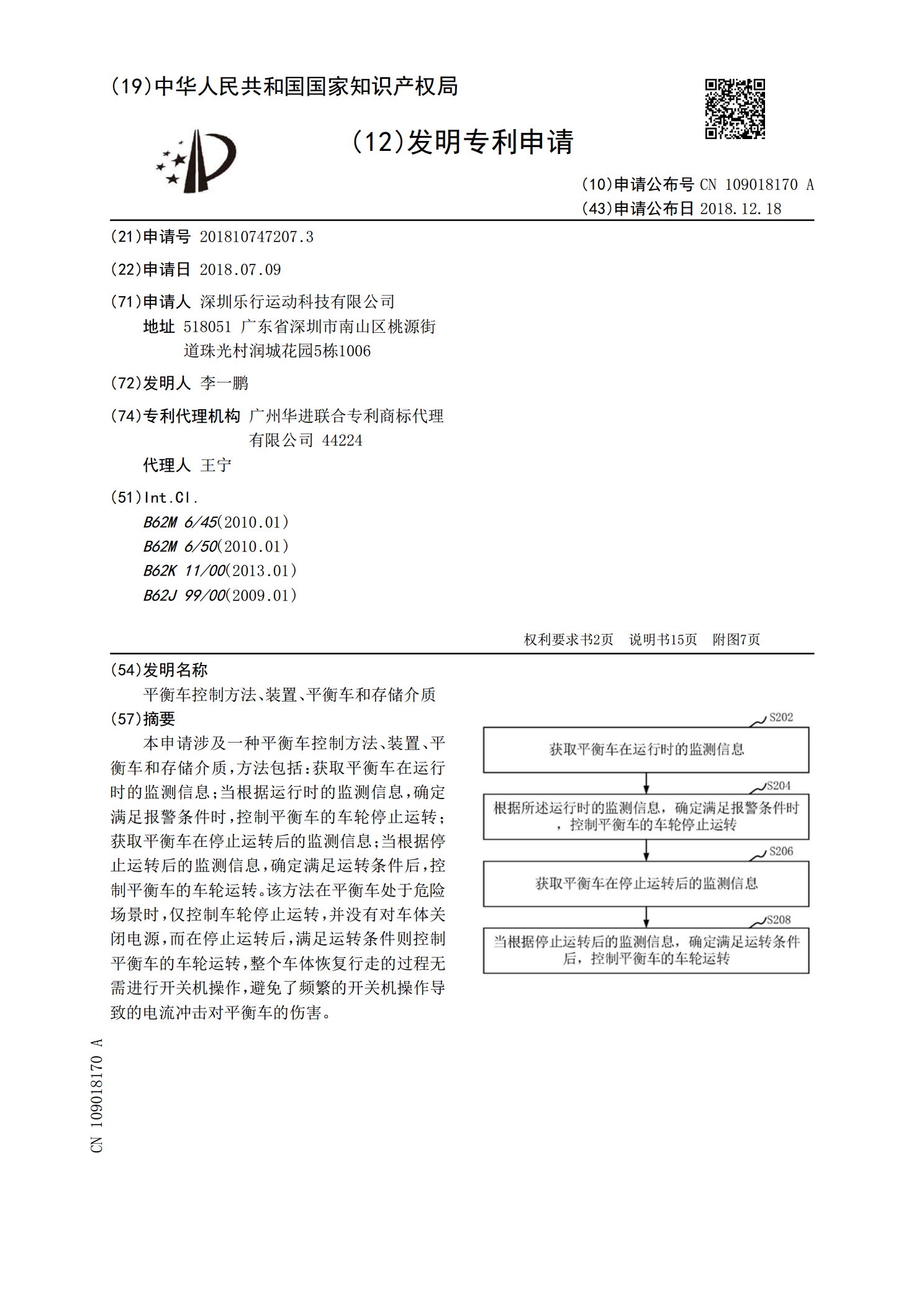
本申请涉及一种平衡车控制方法、装置、平衡车和存储介质,方法包括:获取平衡车在运行时的监测信息;当根据运行时的监测信息,确定满足报警条件时,控制平衡车的车轮停止运转;获取平衡车在停止运转后的监测信息;当根据停止运转后的监测信息,确定满足运转条件后,控制平衡车的车轮运转。该方法在平衡车处于危险场景时,仅控制车轮停止运转,并没有对车体关闭电源,而在停止运转后,满足运转条件则控制平衡车的车轮运转,整个车体恢复行走的过程无需进行开关机操作,避免了频繁的开关机操作导致的电流冲击对平衡车的伤害。
平衡车控制方法、装置、平衡车和存储介质.pdf
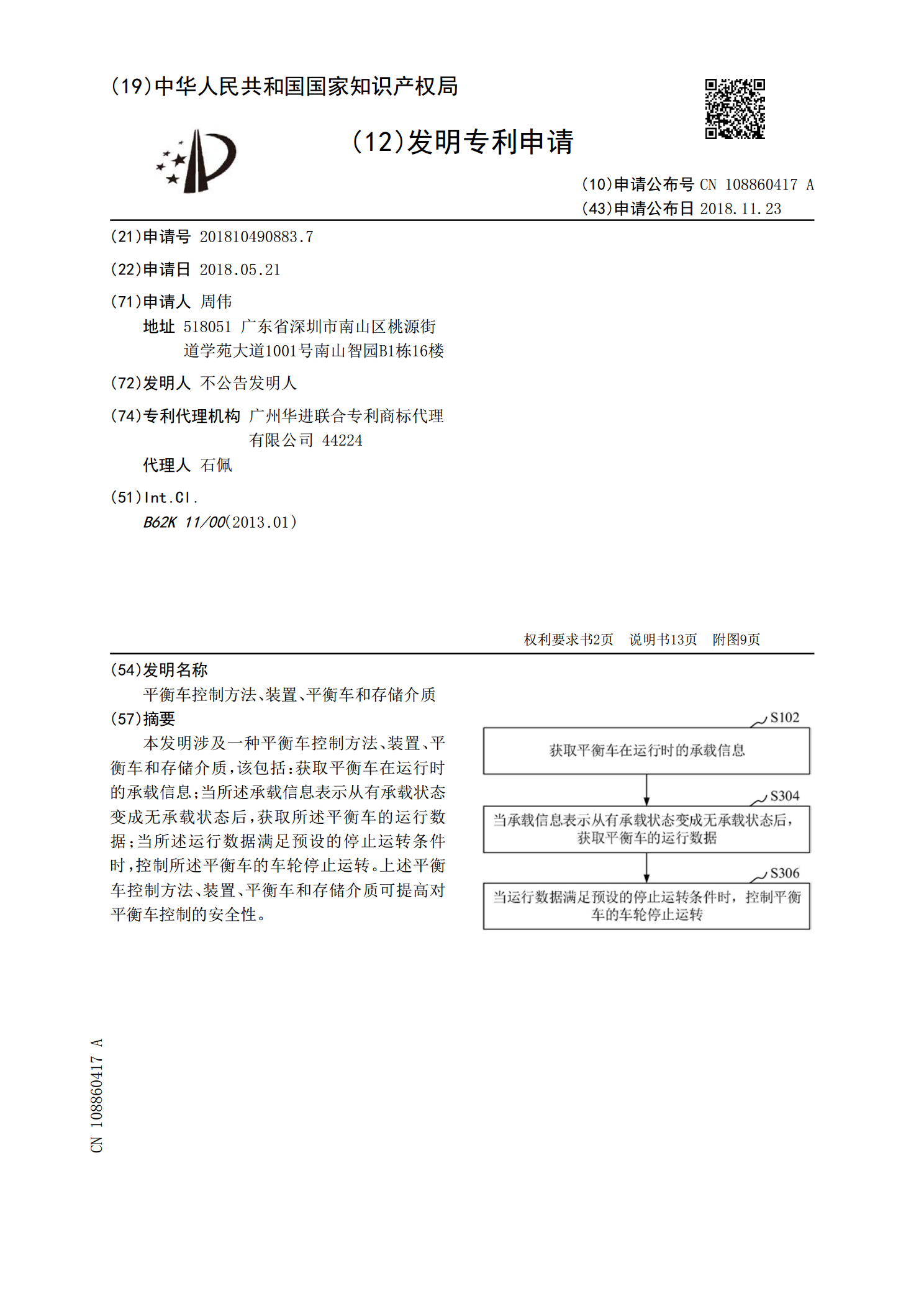
本发明涉及一种平衡车控制方法、装置、平衡车和存储介质,该包括:获取平衡车在运行时的承载信息;当所述承载信息表示从有承载状态变成无承载状态后,获取所述平衡车的运行数据;当所述运行数据满足预设的停止运转条件时,控制所述平衡车的车轮停止运转。上述平衡车控制方法、装置、平衡车和存储介质可提高对平衡车控制的安全性。

平衡车的路况共享方法、装置及平衡车.pdf
本公开是关于一种平衡车的路况共享方法、装置及平衡车,该方法包括:通过摄像头采集当前平衡车视野内的路况图像信息,判断所述路况图像信息内是否存在视野盲区;当存在所述视野盲区时,针对所述视野盲区生成盲区信息,并将所述盲区信息发送至与所述当前平衡车处于同一队列中的其他平衡车。