
基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告.docx
基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告随着人们对于车辆乘坐舒适性和安全性越来越重视,车辆悬挂系统的研究也变得愈发重要。在悬挂系统的研究中,半主动悬挂系统由于具有较好的安全性和乘坐舒适性而备受关注。而磁流变阻尼器是一种常用于半主动悬挂系统的元件,本文将以此为基础,对于车辆半主动悬挂智能控制的研究进行综述。磁流变阻尼器(Magnetorheological(MR)Damper)是一种将流变性体作为阻尼剂的阻尼器。MR阻尼器能够通过改变电磁场的强度来调整阻尼器内部流变材料颗粒的排布,从而控制车辆
基于磁流变阻尼器的车辆悬架半主动控制研究_建模与直接.pdf
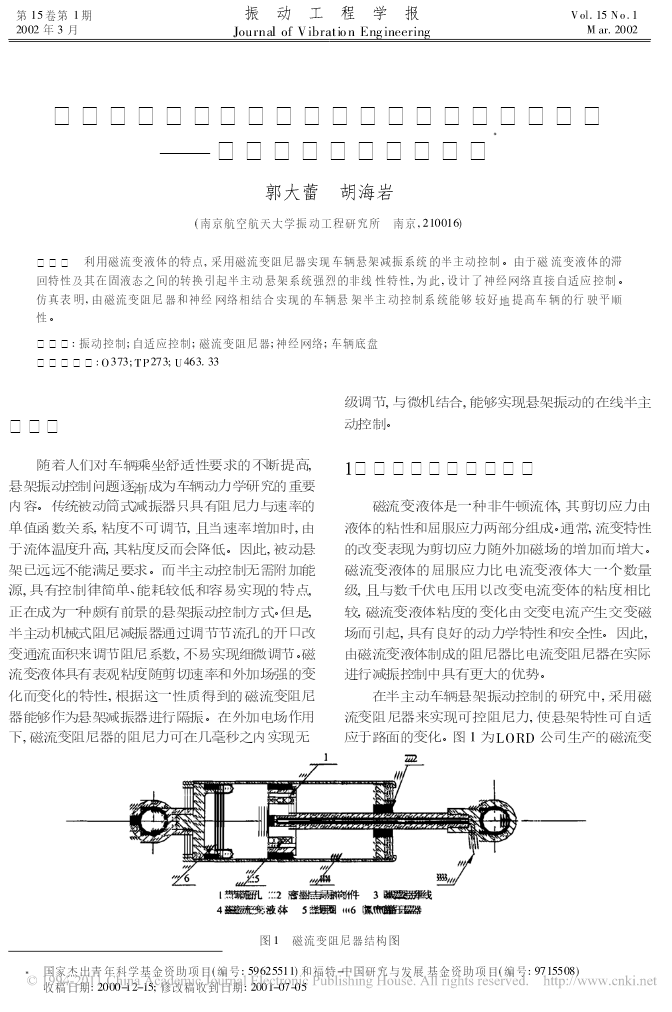
第15卷第1期振动工程学报Vol.15No.12002年3月JournalofVibrationEngineeringMar.2002基于磁流变阻尼器的车辆悬架半主动控制研究——建模与直接自适应控制�郭大蕾胡海岩(南京航空航天大学振动工程研究所南京,210016)摘要利用磁流变液体的特点,采用磁流变阻尼器实现车辆悬架减振系统的半主动控制。由于磁流变液体的滞回特性及其在固液态之间的转换引起半主动悬架系统强烈的非线性特性,为此,设计了神经网络直接自适应控制。仿真表明,由磁流变阻尼器和神经网络相结合实现的车辆悬

基于磁流变阻尼器的车辆半主动控制的综述报告.docx
基于磁流变阻尼器的车辆半主动控制的综述报告磁流变阻尼器是一种新型的半主动控制技术,它可以在车辆行驶过程中实现对车辆的阻尼调节,从而改变车辆的运动状态。在车辆动力性、舒适性、稳定性等方面具有广泛的应用前景。本报告将对基于磁流变阻尼器的车辆半主动控制技术进行综述,主要介绍其原理、分类及应用等方面的内容。一、磁流变阻尼器的基本原理磁流变阻尼器是一种利用磁流变效应实现阻尼调节的装置,它由两个平行电极组成,中间填充磁流变材料。当通过电极施加电流时,磁流变材料变得更加致密,阻力也随之增加。因此,可以通过控制电流的大小

磁流变液减振器建模及磁流变半主动悬架控制研究的中期报告.docx
磁流变液减振器建模及磁流变半主动悬架控制研究的中期报告本研究的中期报告主要内容包括两个方面:磁流变液减振器的建模与仿真和磁流变半主动悬架的控制研究。1.磁流变液减振器的建模与仿真磁流变液减振器是一种基于磁流变效应的半主动减振器,能够通过改变磁场强度来实现对振动的抑制。本文对磁流变液减振器建立了一维非等温稳态模型,并利用Matlab进行了仿真。首先,根据液体力学理论和Maxwell应力模型,建立了磁流变液体的Bingham模型和流变学模型。然后,结合弹性力学理论和ANSYS有限元软件对减振器的结构进行建模,

汽车磁流变半主动悬架仿人智能控制研究的任务书.docx
汽车磁流变半主动悬架仿人智能控制研究的任务书任务书任务名称:汽车磁流变半主动悬架仿人智能控制研究研究目的:通过分析汽车磁流变半主动悬架的控制原理和仿人智能控制的理论基础,设计并实现一种能够自适应路面状况和驾驶员行为的智能控制系统,提高汽车行驶的安全性和舒适性。研究内容:1.磁流变半主动悬架的原理、结构和特点分析,并探讨其在改善车辆行驶性能方面的应用;2.仿人智能控制理论的研究与应用,在此基础上设计一种能够自适应路面状况和驾驶员行为的智能控制系统;3.通过模拟和实验对所设计的智能控制系统进行验证和调试,并评