
用于车辆的可变阻尼半主动悬架系统的控制方法.pdf

康佳****文库

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于车辆的可变阻尼半主动悬架系统的控制方法.pdf
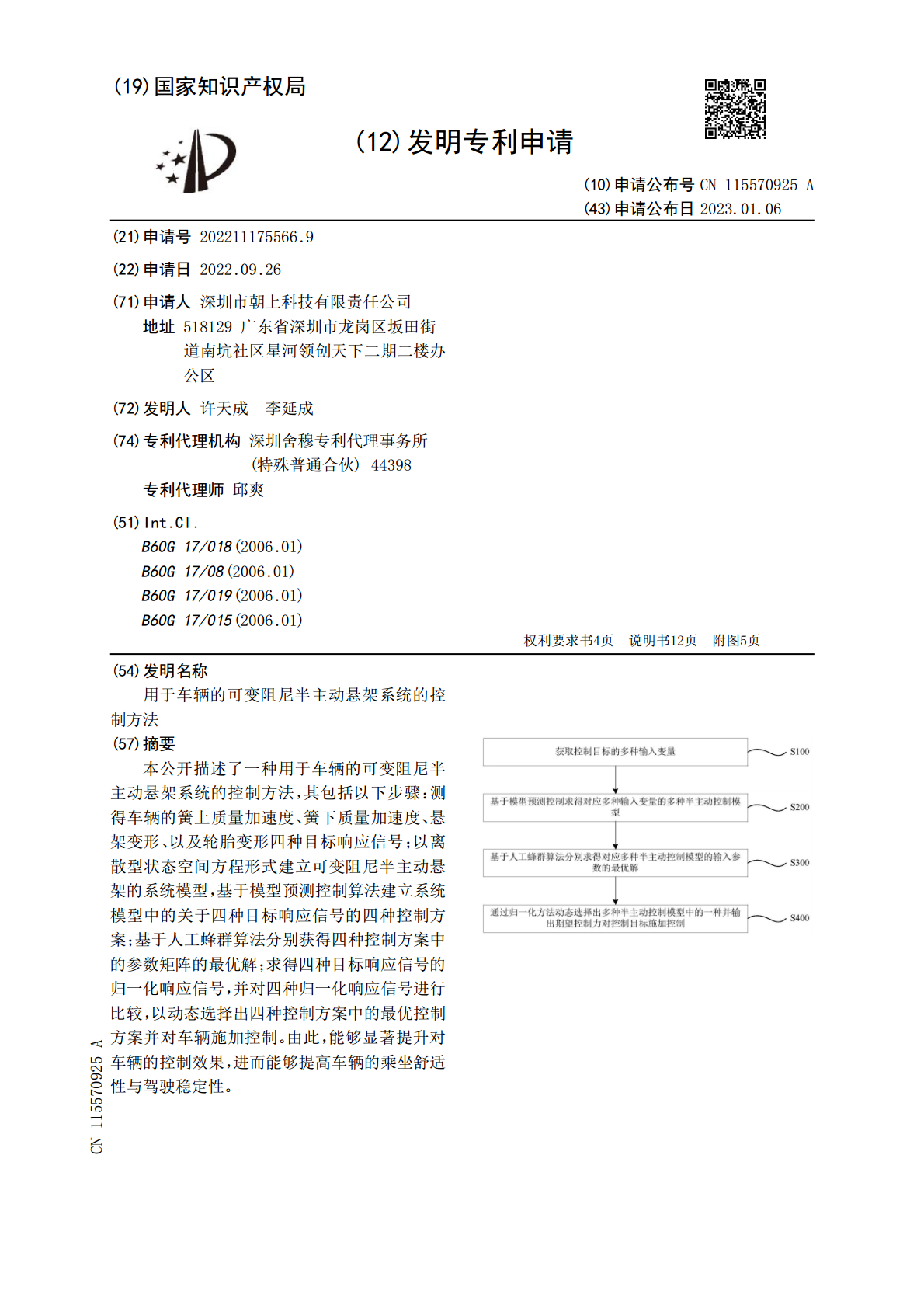
本公开描述了一种用于车辆的可变阻尼半主动悬架系统的控制方法,其包括以下步骤:测得车辆的簧上质量加速度、簧下质量加速度、悬架变形、以及轮胎变形四种目标响应信号;以离散型状态空间方程形式建立可变阻尼半主动悬架的系统模型,基于模型预测控制算法建立系统模型中的关于四种目标响应信号的四种控制方案;基于人工蜂群算法分别获得四种控制方案中的参数矩阵的最优解;求得四种目标响应信号的归一化响应信号,并对四种归一化响应信号进行比较,以动态选择出四种控制方案中的最优控制方案并对车辆施加控制。由此,能够显著提升对车辆的控制效果,
一种用于车辆悬架系统的智能加速度阻尼半主动控制方法.pdf
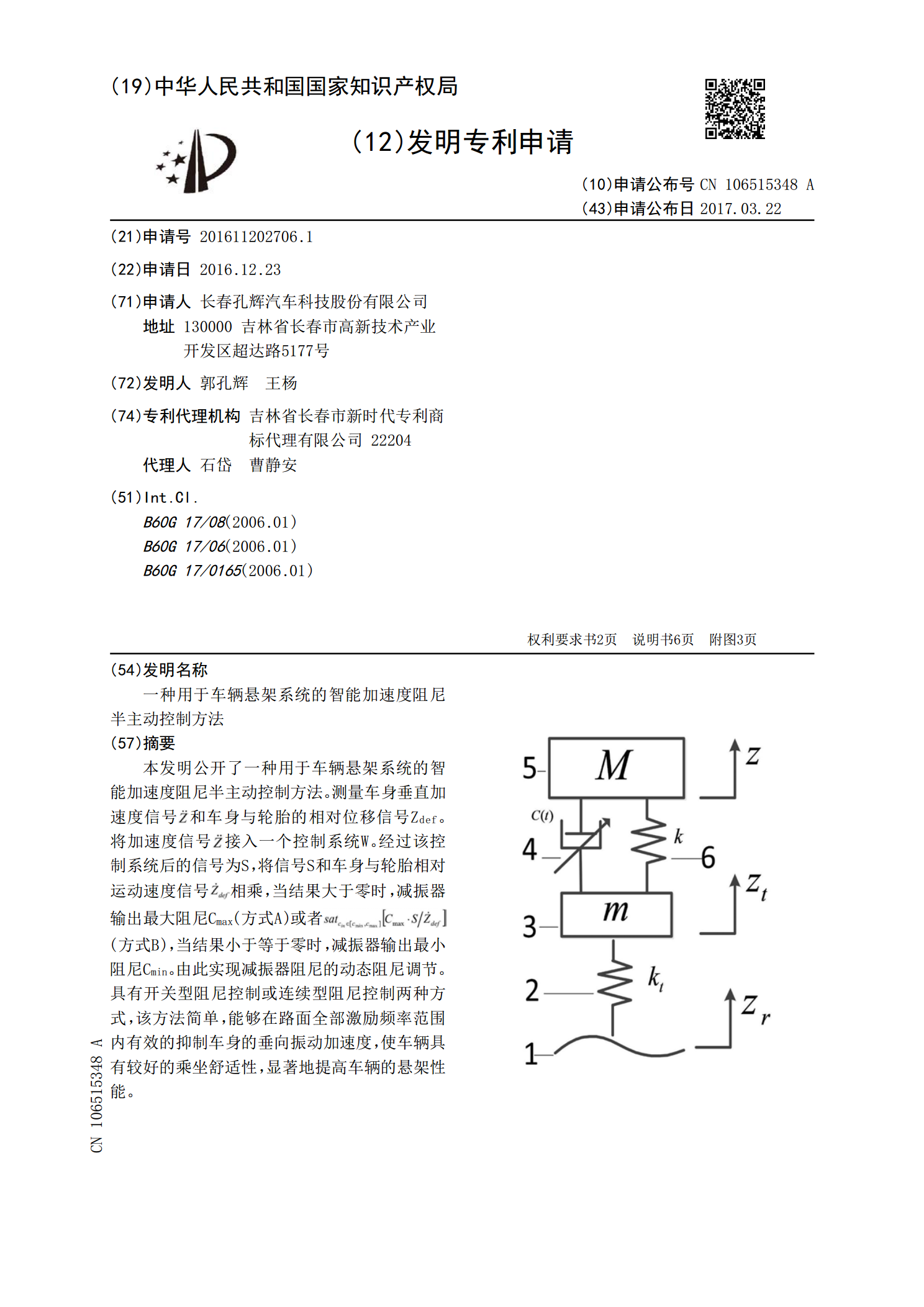
本发明公开了一种用于车辆悬架系统的智能加速度阻尼半主动控制方法。测量车身垂直加速度信号和车身与轮胎的相对位移信号Z
用于控制主动悬架系统的阻尼器的系统和方法.pdf
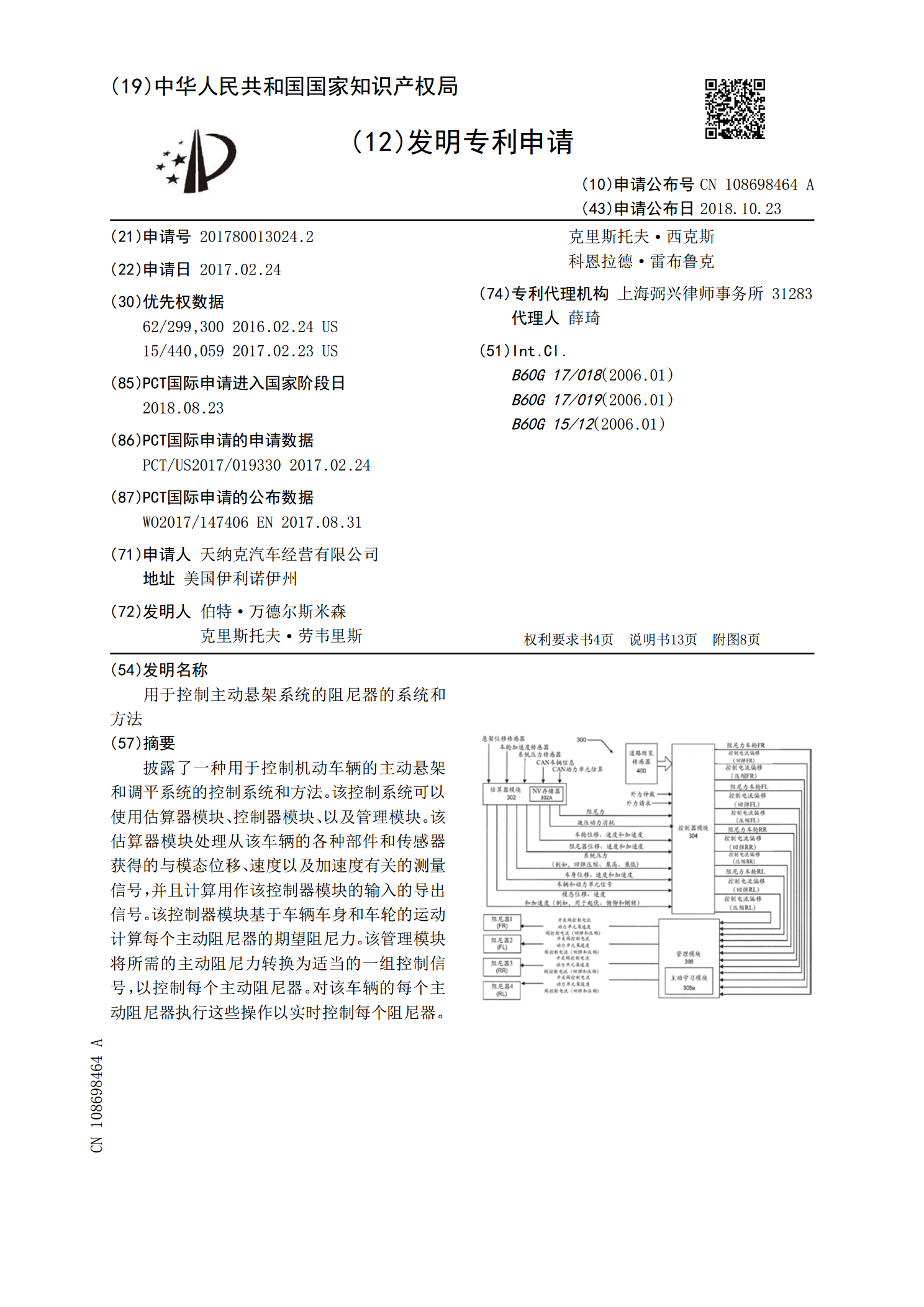
披露了一种用于控制机动车辆的主动悬架和调平系统的控制系统和方法。该控制系统可以使用估算器模块、控制器模块、以及管理模块。该估算器模块处理从该车辆的各种部件和传感器获得的与模态位移、速度以及加速度有关的测量信号,并且计算用作该控制器模块的输入的导出信号。该控制器模块基于车辆车身和车轮的运动计算每个主动阻尼器的期望阻尼力。该管理模块将所需的主动阻尼力转换为适当的一组控制信号,以控制每个主动阻尼器。对该车辆的每个主动阻尼器执行这些操作以实时控制每个阻尼器。

车辆半主动悬架阻尼多模式切换控制研究.docx
车辆半主动悬架阻尼多模式切换控制研究车辆半主动悬架阻尼多模式切换控制研究引言:随着汽车工业的快速发展,车辆悬架系统作为车辆的重要组成部分,对乘坐舒适性、操控性和安全性等方面扮演着至关重要的角色。半主动悬架系统,作为一种具有主被动悬架控制优势的中间地带,为车辆平衡提供了有效的解决方案。通过根据路况变化调节悬架阻尼,半主动悬架系统能够提高车辆的行驶平稳性和舒适性。因此,对于半主动悬架阻尼多模式切换控制的研究具有重要的意义。1.背景介绍车辆悬架系统可分为主动悬架、半主动悬架和被动悬架三种类型。其中,主动悬架系统

汽车半主动悬架系统实时最佳阻尼控制算法.pdf
本发明涉及连续控制式半主动悬架系统最佳阻尼的控制算法,是为更好地满足人们对乘坐舒适性和汽车行驶安全性要求而研发的。利用传感器测得车身振动加速度信号、车速信号和转角信号,根据传感器所测得的信号感知车辆当前行驶路况及悬架系统阻尼比;根据测得的车身和车轮振动加速度,得到车身和车轮垂直运动速度及它们之间的相对运动速度;根据车辆参数确定出当前车速和路况下所要求的减振器最佳阻尼系数和阻尼力,并通过控制器输出步进电机转角控制信号,控制调节可控减振器阻尼节流孔的面积,使半主动悬架系统达到所要求的最佳阻尼和阻尼力。本发明所