
下肢康复训练机器人机械腿的踝关节机构.pdf

努力****星驰

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

下肢康复训练机器人机械腿的踝关节机构.pdf
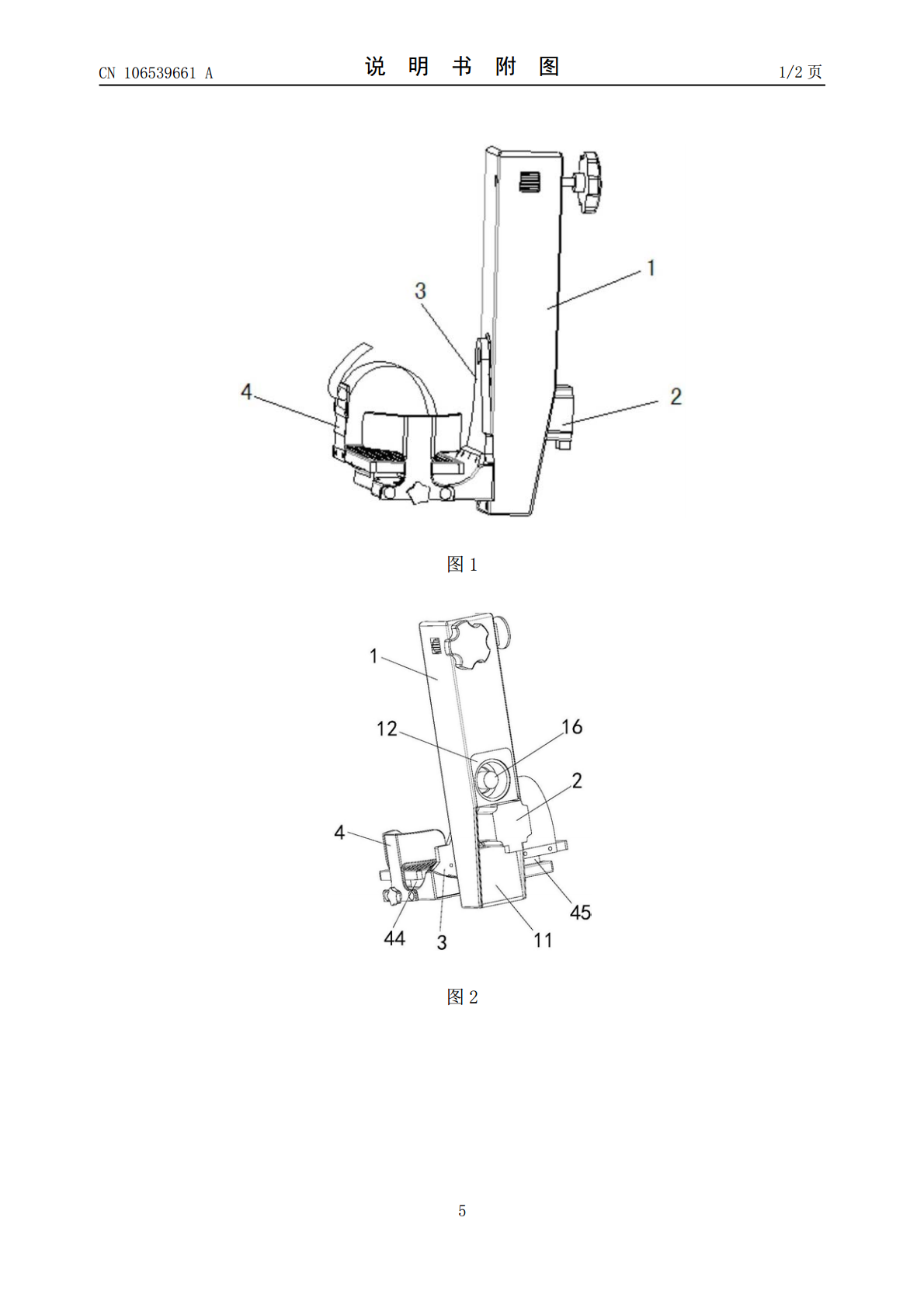
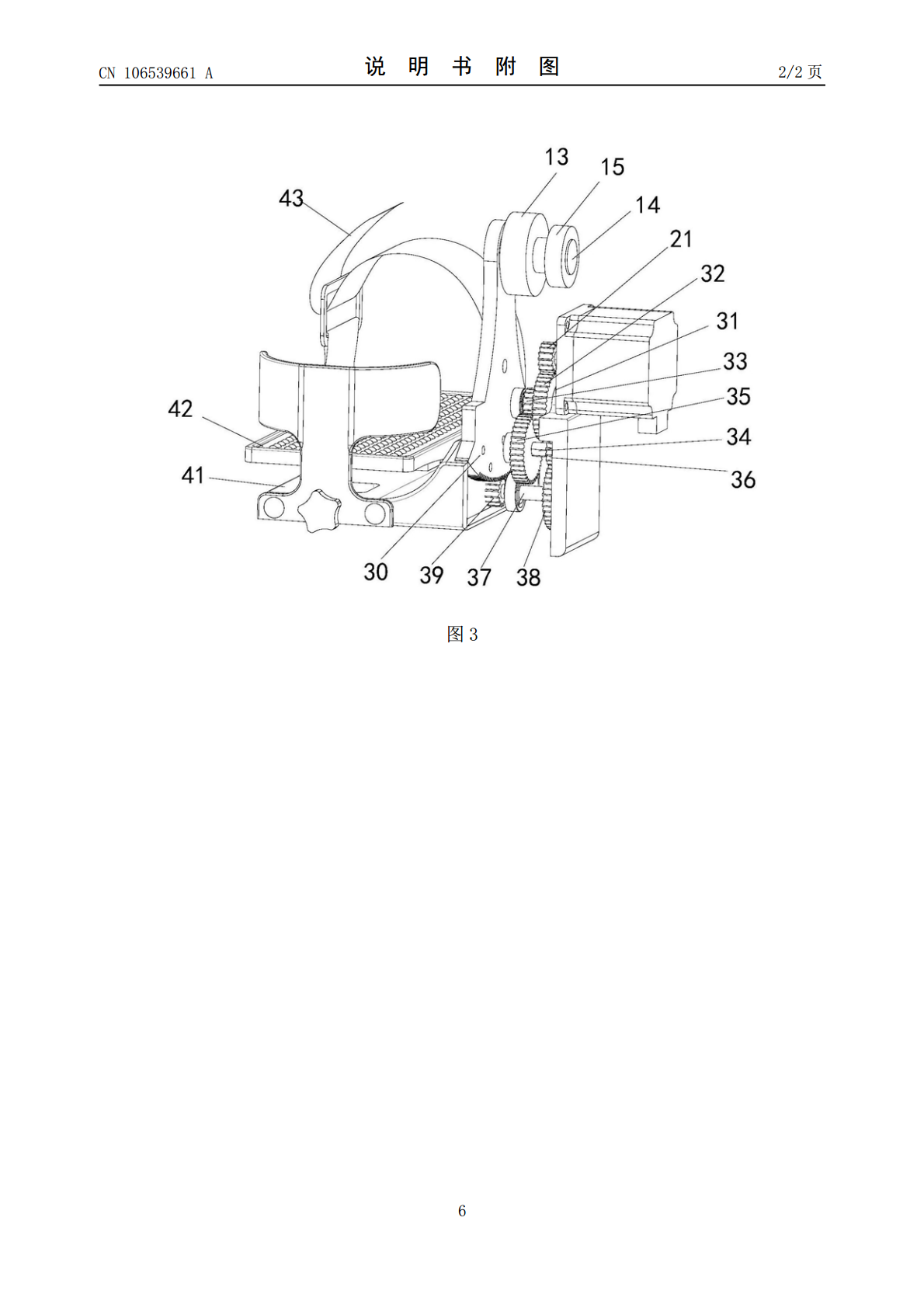
一种下肢康复训练机器人机械腿的踝关节机构,包括驱动电机、减速增力机构和脚蹬,其中的减速增力机构包括三级减速齿轮组和扇形齿;驱动电机的驱动轴上安装有驱动齿轮,一级减速齿轮组与驱动齿轮啮合传动相连,二级减速齿轮组与一级减速齿轮组啮合传动相连,三级减速齿轮组与二级减速齿轮组啮合传动相连,扇形齿设置在小腿套筒外,其上端与小腿套筒可转动相连,下部与三级减速齿轮组啮合传动相连,并与脚蹬固定相连。本发明采用三级减速齿轮组安装在小腿套筒内部,同时与之相连的驱动电机的一部分沉入小腿套筒内部,可用小扭矩电机经过减速齿轮组带动

下肢康复训练机器人踝关节装置.pdf
本发明公开了一种适用于串联结构的下肢康复训练机器人的踝关节装置,属于康复医疗设备领域。本发明踝关节装置实现了三重安全防护即软件控制电机13的速度和运动位置范围、行程开关2和机械限位销1也都限定了踝关节电机13的安全极限运动范围。踝关节电机13置于足部箱体11和19内,通过同步带轮3和15传递运动,并有同步带张紧机构16。踝关节支架14固定在踝关节内外护板4和18上,足部踏板19可以绕踝关节支架14的B位置的销轴做相对转动,通过压力传感器7和9实现了足部正反双向扭矩的数据测量。传感器套6、8和10可分别预紧
下肢康复机器人的机械腿.pdf
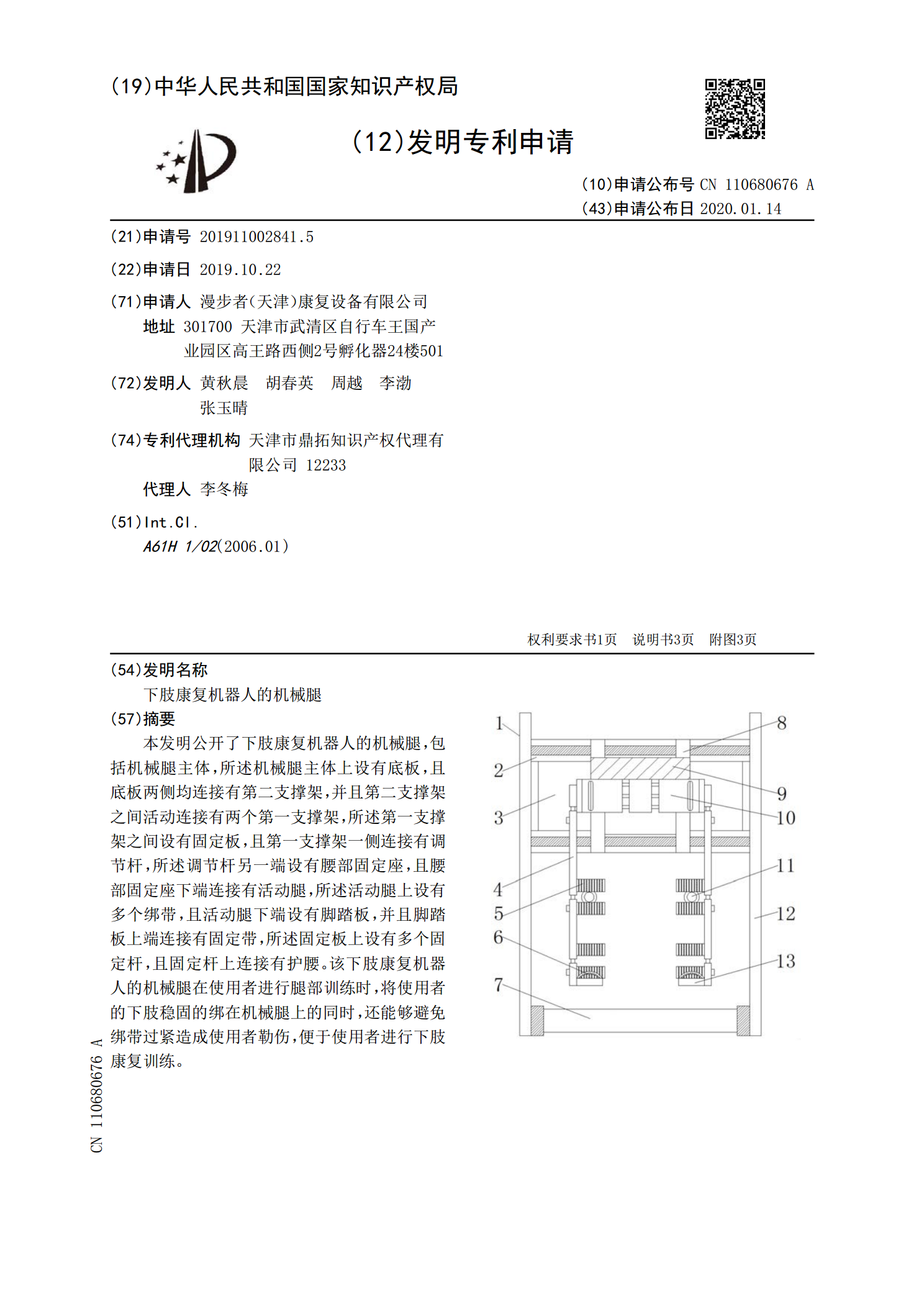
本发明公开了下肢康复机器人的机械腿,包括机械腿主体,所述机械腿主体上设有底板,且底板两侧均连接有第二支撑架,并且第二支撑架之间活动连接有两个第一支撑架,所述第一支撑架之间设有固定板,且第一支撑架一侧连接有调节杆,所述调节杆另一端设有腰部固定座,且腰部固定座下端连接有活动腿,所述活动腿上设有多个绑带,且活动腿下端设有脚踏板,并且脚踏板上端连接有固定带,所述固定板上设有多个固定杆,且固定杆上连接有护腰。该下肢康复机器人的机械腿在使用者进行腿部训练时,将使用者的下肢稳固的绑在机械腿上的同时,还能够避免绑带过紧造
下肢康复训练机器人.pdf
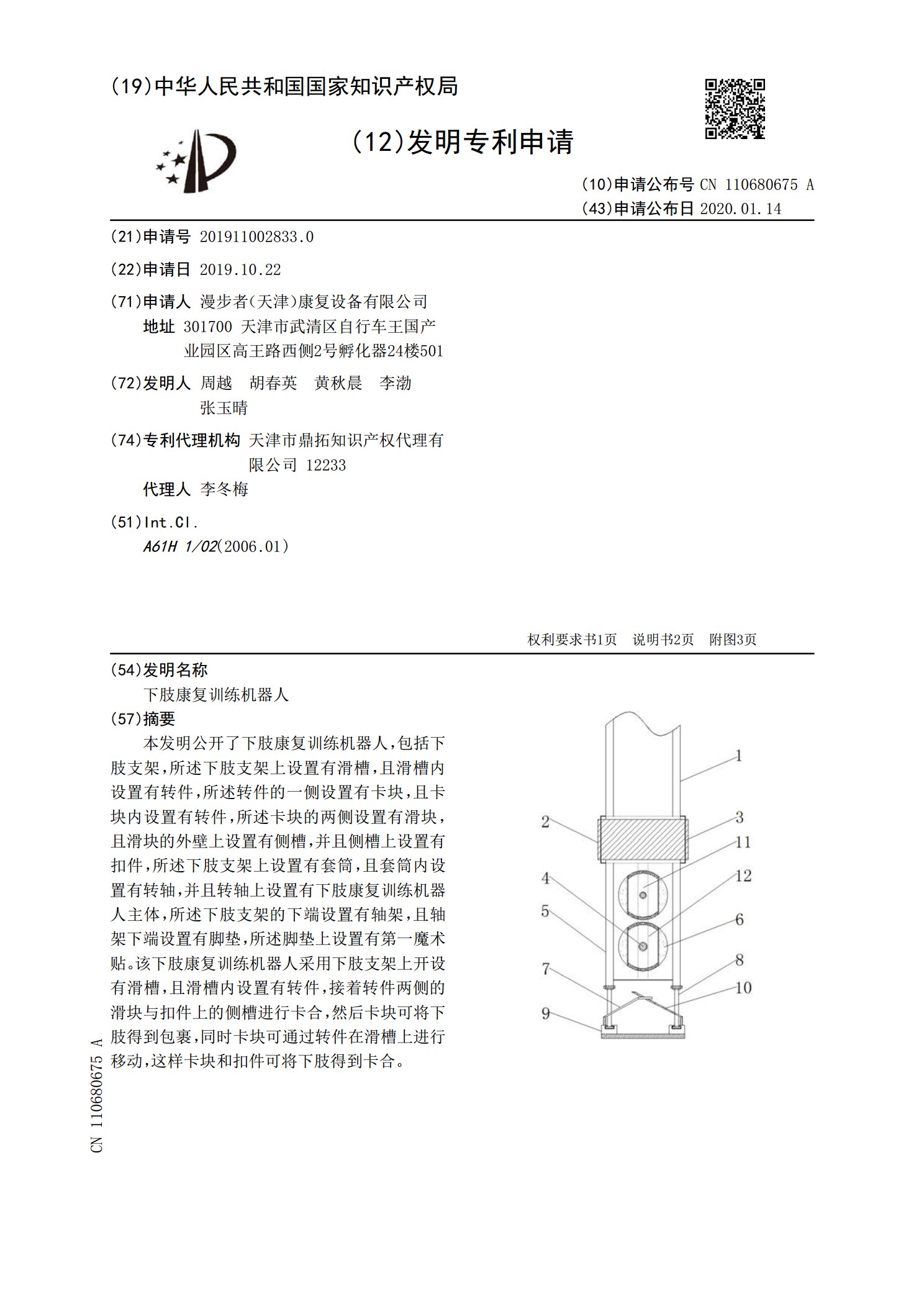
本发明公开了下肢康复训练机器人,包括下肢支架,所述下肢支架上设置有滑槽,且滑槽内设置有转件,所述转件的一侧设置有卡块,且卡块内设置有转件,所述卡块的两侧设置有滑块,且滑块的外壁上设置有侧槽,并且侧槽上设置有扣件,所述下肢支架上设置有套筒,且套筒内设置有转轴,并且转轴上设置有下肢康复训练机器人主体,所述下肢支架的下端设置有轴架,且轴架下端设置有脚垫,所述脚垫上设置有第一魔术贴。该下肢康复训练机器人采用下肢支架上开设有滑槽,且滑槽内设置有转件,接着转件两侧的滑块与扣件上的侧槽进行卡合,然后卡块可将下肢得到包裹

一种新型踝关节康复训练机器人机构的研究的开题报告.docx
一种新型踝关节康复训练机器人机构的研究的开题报告一、研究的背景与意义踝关节是人体重要的支撑和运动部位,对人体的行走和站立至关重要。然而,踝关节的损伤会导致行动受限,甚至造成残疾。因此,研究踝关节康复训练机器人对于促进患者恢复,提高生活质量具有重要意义。目前,市场上的踝关节康复训练机器人主要采用外骨骼和电动机驱动的方式。然而,这些机器人存在着重量大、驱动力不够灵活等问题。因此,本研究致力于设计一种新型的踝关节康复训练机器人机构,以解决现有机器人存在的问题。二、研究内容与方法本研究的主要内容是设计一种新型的踝