
一种新型踝关节康复训练机器人机构的研究的开题报告.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型踝关节康复训练机器人机构的研究的开题报告.docx
一种新型踝关节康复训练机器人机构的研究的开题报告一、研究的背景与意义踝关节是人体重要的支撑和运动部位,对人体的行走和站立至关重要。然而,踝关节的损伤会导致行动受限,甚至造成残疾。因此,研究踝关节康复训练机器人对于促进患者恢复,提高生活质量具有重要意义。目前,市场上的踝关节康复训练机器人主要采用外骨骼和电动机驱动的方式。然而,这些机器人存在着重量大、驱动力不够灵活等问题。因此,本研究致力于设计一种新型的踝关节康复训练机器人机构,以解决现有机器人存在的问题。二、研究内容与方法本研究的主要内容是设计一种新型的踝

一种新型踝关节康复训练机器人机构的研究的中期报告.docx
一种新型踝关节康复训练机器人机构的研究的中期报告引言踝关节是人体最重要的关节之一,它支撑着我们的整个体重,在日常生活和运动中发挥着极其重要的作用。然而,由于各种各样的原因,比如运动损伤、遗传缺陷、疾病等,踝关节也很容易受到伤害和损伤。康复训练是帮助患者尽快恢复和重建踝关节功能的重要手段之一。因此,开发一种高效、安全、可靠的踝关节康复训练机器人是十分必要和有意义的。本文针对当前市场上普遍存在的踝关节康复训练机器人存在的问题和不足,提出了一种新型的踝关节康复训练机器人机构,并通过初步评估表明其在一定程度上已经

下肢康复训练机器人机械腿的踝关节机构.pdf
一种下肢康复训练机器人机械腿的踝关节机构,包括驱动电机、减速增力机构和脚蹬,其中的减速增力机构包括三级减速齿轮组和扇形齿;驱动电机的驱动轴上安装有驱动齿轮,一级减速齿轮组与驱动齿轮啮合传动相连,二级减速齿轮组与一级减速齿轮组啮合传动相连,三级减速齿轮组与二级减速齿轮组啮合传动相连,扇形齿设置在小腿套筒外,其上端与小腿套筒可转动相连,下部与三级减速齿轮组啮合传动相连,并与脚蹬固定相连。本发明采用三级减速齿轮组安装在小腿套筒内部,同时与之相连的驱动电机的一部分沉入小腿套筒内部,可用小扭矩电机经过减速齿轮组带动

一种新型码垛机器人的机构设计及动态性能研究的开题报告.docx
一种新型码垛机器人的机构设计及动态性能研究的开题报告一、选题背景及意义随着工业自动化的发展,码垛机器人越来越广泛应用于物流、食品、医疗、汽车等领域,实现了企业智能化生产。传统码垛机器人基于编程运行,缺乏灵活性和智能性,无法满足不同产品的快速切换生产线,导致了一定的生产效率问题。因此,本课题旨在设计一种新型码垛机器人,以提高生产效率和运营成本,同时提高运动控制精度、位姿识别等问题的解决方法。二、课题研究1.机构设计本课题设计的码垛机器人,采用平移加旋转的机构设计,将传统机器人的转换方式更换为传感器的反馈控制
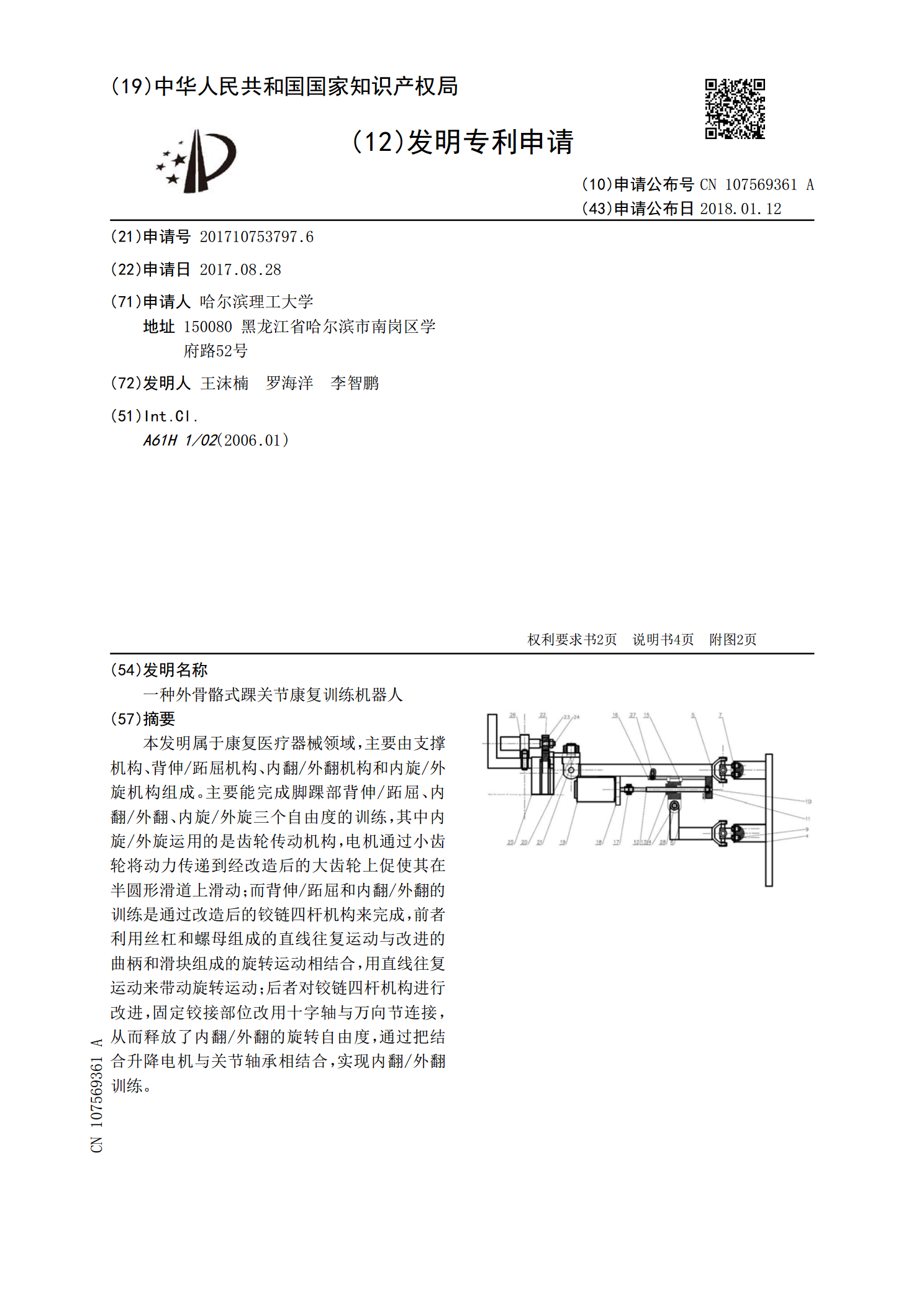
一种外骨骼式踝关节康复训练机器人.pdf
本发明属于康复医疗器械领域,主要由支撑机构、背伸/跖屈机构、内翻/外翻机构和内旋/外旋机构组成。主要能完成脚踝部背伸/跖屈、内翻/外翻、内旋/外旋三个自由度的训练,其中内旋/外旋运用的是齿轮传动机构,电机通过小齿轮将动力传递到经改造后的大齿轮上促使其在半圆形滑道上滑动;而背伸/跖屈和内翻/外翻的训练是通过改造后的铰链四杆机构来完成,前者利用丝杠和螺母组成的直线往复运动与改进的曲柄和滑块组成的旋转运动相结合,用直线往复运动来带动旋转运动;后者对铰链四杆机构进行改进,固定铰接部位改用十字轴与万向节连接,从而释