
一种磁力线圈结合动量轮的航天器姿态联合控制方法.pdf

努力****向丝

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种磁力线圈结合动量轮的航天器姿态联合控制方法.pdf
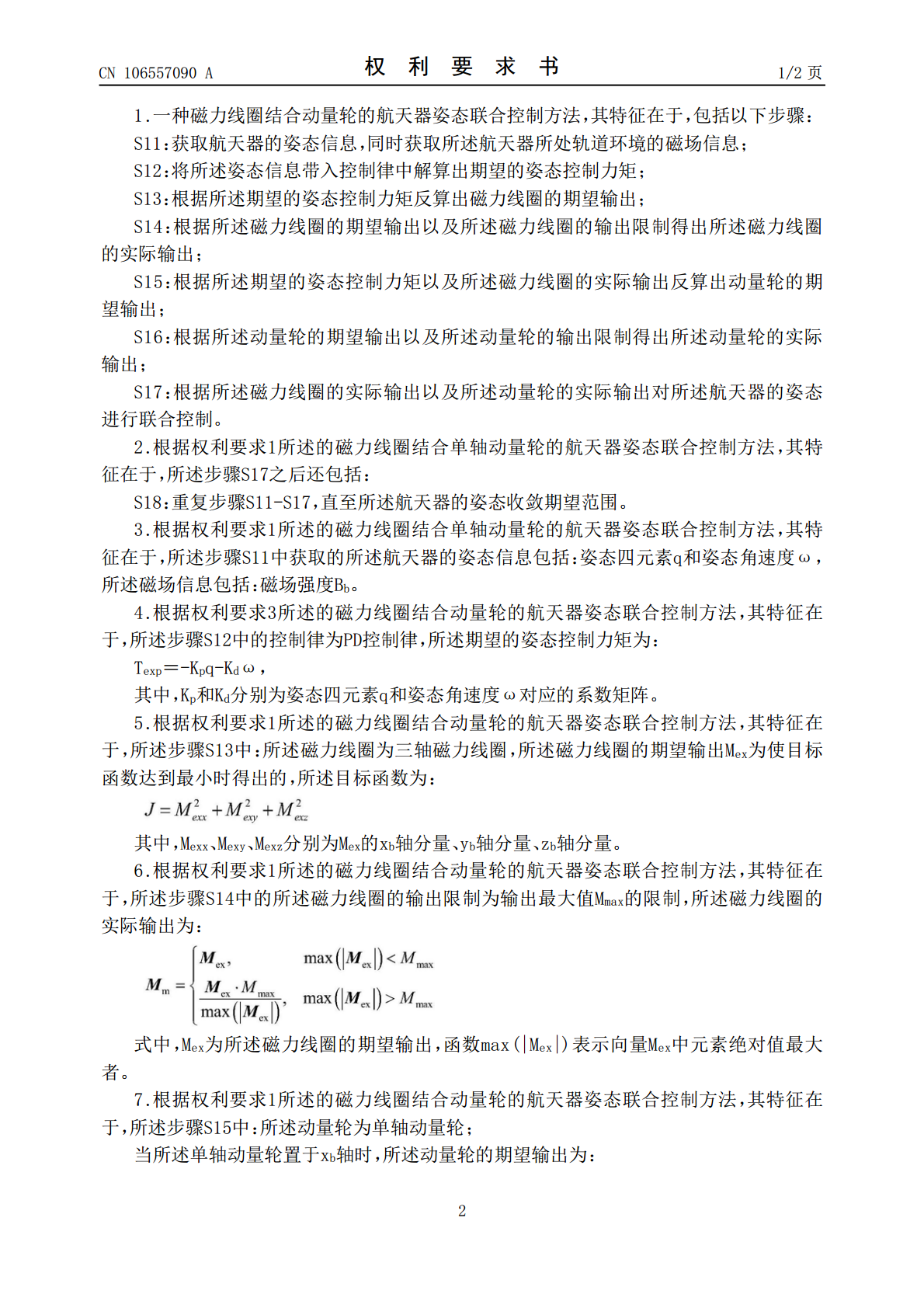
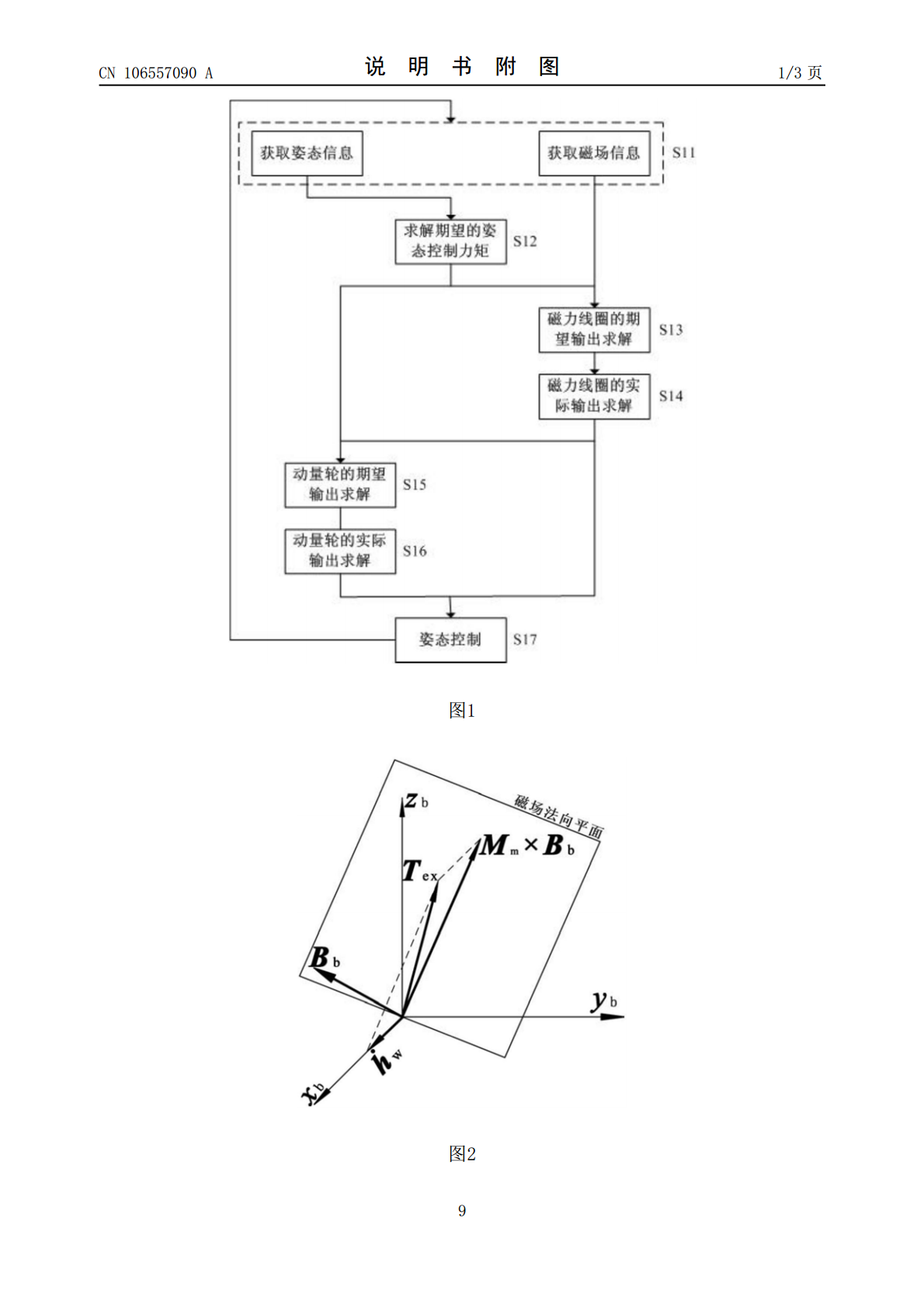
本发明公开了一种磁力线圈结合动量轮的航天器姿态联合控制方法,其包括:获取航天器的姿态信息,同时获取航天器所处轨道环境的磁场信息;求解期望的姿态控制力矩;求解磁力线圈的期望输出;求解磁力线圈的实际输出;求解动量轮的期望输出;求解动量轮的实际输出;根据磁力线圈的实际输出和动量轮的实际输出进行姿态控制。本发明的磁力线圈结合动量轮的航天器姿态联合控制方法,控制方式简单,对航天器的导航系统、控制系统等无额外需求,可综合利用星上资源,节约工质,具有算法先进、控制精度高、姿态收敛速度快的优点。
一种用于航天器姿态控制实验的模块化惯性动量轮装置.pdf
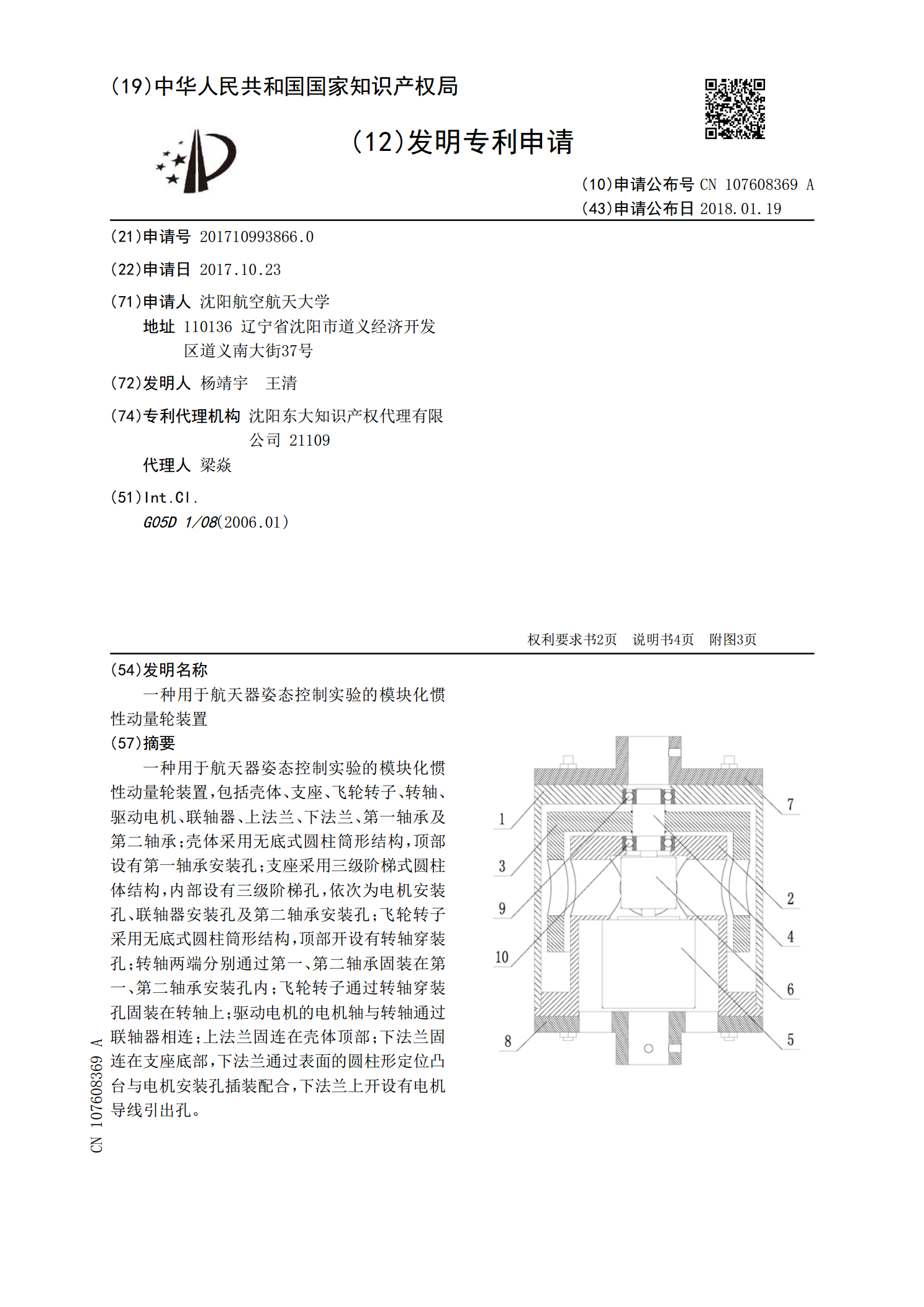
一种用于航天器姿态控制实验的模块化惯性动量轮装置,包括壳体、支座、飞轮转子、转轴、驱动电机、联轴器、上法兰、下法兰、第一轴承及第二轴承;壳体采用无底式圆柱筒形结构,顶部设有第一轴承安装孔;支座采用三级阶梯式圆柱体结构,内部设有三级阶梯孔,依次为电机安装孔、联轴器安装孔及第二轴承安装孔;飞轮转子采用无底式圆柱筒形结构,顶部开设有转轴穿装孔;转轴两端分别通过第一、第二轴承固装在第一、第二轴承安装孔内;飞轮转子通过转轴穿装孔固装在转轴上;驱动电机的电机轴与转轴通过联轴器相连;上法兰固连在壳体顶部;下法兰固连在支

一种基于动量轮控制的全姿态捕获方法.pdf
本发明涉及一种基于动量轮控制的全姿态捕获方法,包括如下步骤:(1)速率阻尼;(2)恒星捕获;(3)姿态更新和星本体地磁强度计算;(4)太阳搜索和太阳定向姿态确定;(5)目标捕获姿态确定;(6)轮控调姿和磁力矩器卸载。本发明针对航天器全姿态捕获问题,提出一种工程可操作性强的、基于动量轮控制的全姿态捕获方法。

一种航天器的初始姿态捕获控制方法及系统.pdf
本发明提供一种航天器的初始姿态捕获控制方法及系统,所述航天器的初始姿态捕获控制方法包括:利用三轴磁力矩器根据地磁在星体的变化率对所述航天器施加控制磁矩,实现速率阻尼阶段控制;利用反作用轮组起旋,根据所述航天器的姿态信息对所述航天器施加三轴轮控,同时卸载所述三轴磁力矩器对所述航天器施加的控制磁矩,实现太阳捕获阶段控制。本发明不仅在姿态控制部件上只采用了反作用轮和磁力矩器,考虑了星箭分离偏差过大的应对措施,首先施加了速率阻尼,以反作用轮不致于饱和为前提条件,同时在太阳捕获阶段,仅依靠磁强计信息和太阳敏感器信息
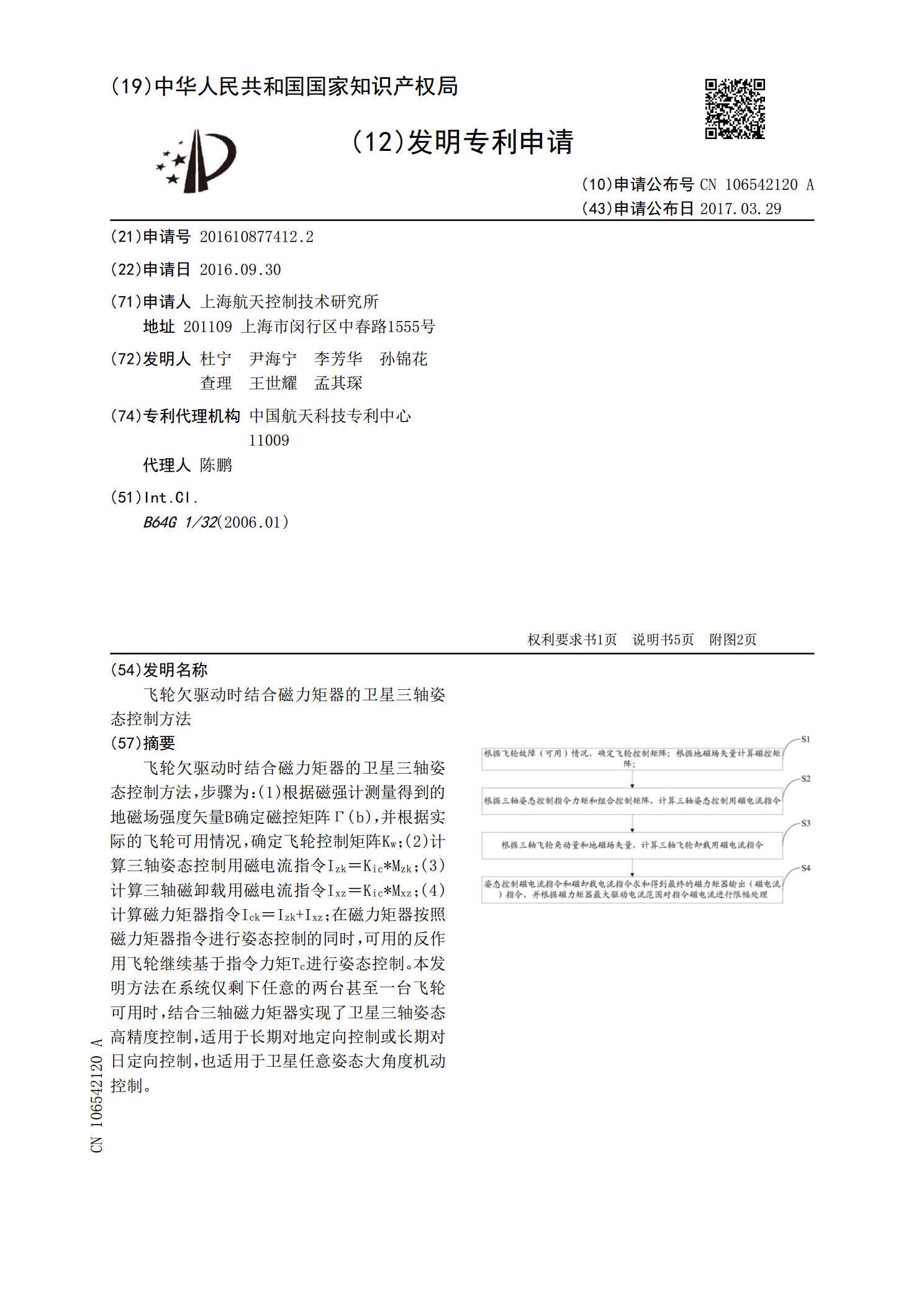
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法.pdf
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法,步骤为:(1)根据磁强计测量得到的地磁场强度矢量B确定磁控矩阵Γ(b),并根据实际的飞轮可用情况,确定飞轮控制矩阵K